Download to read offline







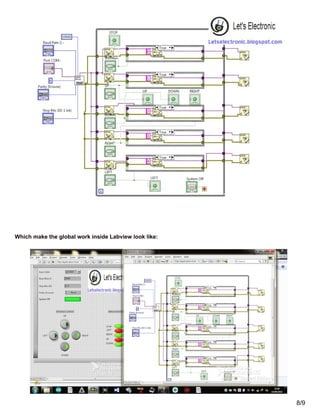


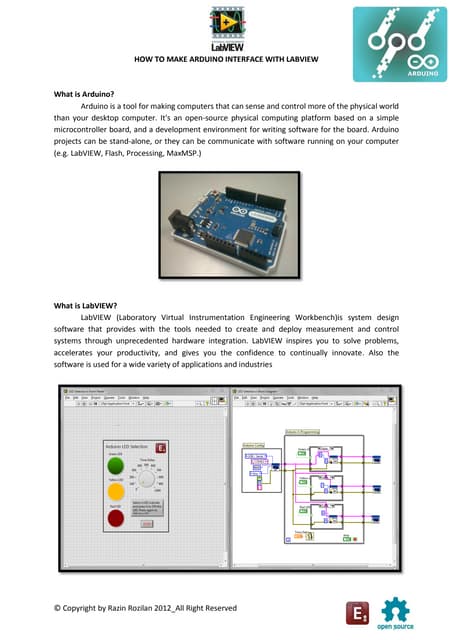
This document discusses controlling a robot using LabVIEW software through a serial communication interface. It describes creating a LabVIEW graphical user interface (GUI) to send command signals to an ATmega328 microcontroller circuit, which then controls motors via an L293D motor driver. The GUI uses NI-VISA to configure a virtual serial port to communicate with the microcontroller in real-time. Commands sent from the LabVIEW GUI are received on the serial port and processed by the microcontroller code to control the robot's movement and functions. An overview of LabVIEW and NI-VISA is also provided to explain their role in the serial communication between the software and hardware parts of the project.