Downloaded 31 times

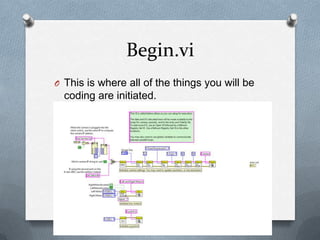
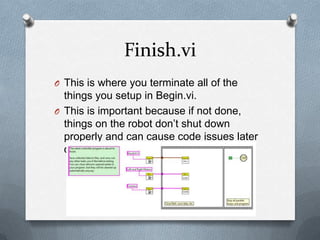
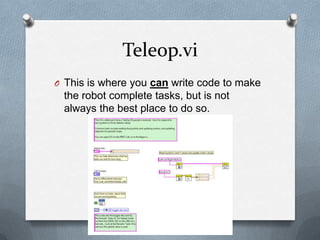
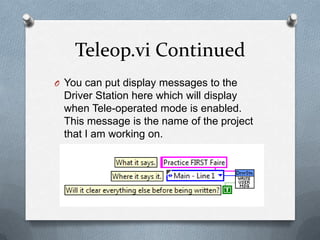
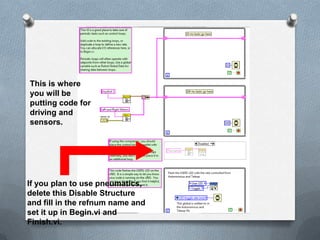
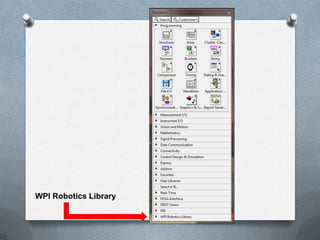

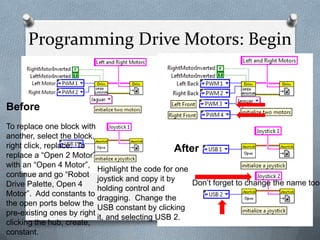
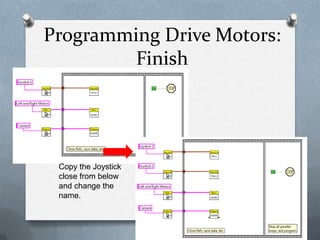
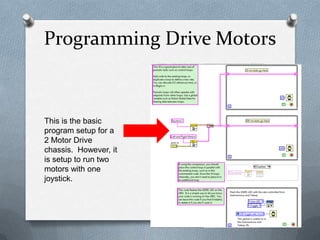
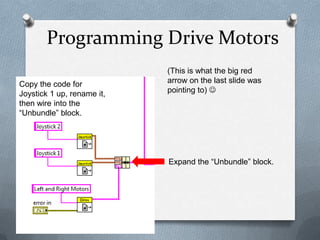
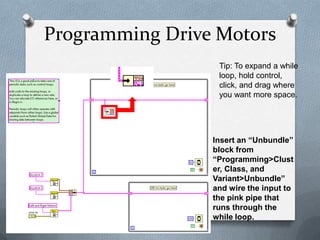
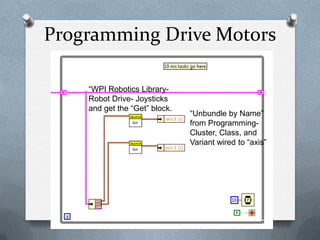
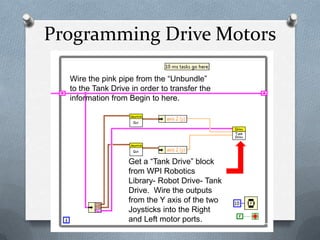


This document provides an overview of programming a robot using LabVIEW for FIRST Robotics Competition. It discusses what LabVIEW is, how to get started with a new project, and where to find code examples. The main content demonstrates how to program a tank drive robot with two joysticks controlling four motors. It shows initializing the motors in Begin.vi, reading the joystick values in Periodic Tasks.vi, and passing the values to a tank drive block to control the motors. Global variables are also introduced as a way to store and access sensor values from anywhere in the code.