Classificació dels principals mecanismes de transmissió del moviment i de les màquines simples. Conceptes: parell cinemàtic, grau de llibertat de les cadenes cinemàtiques. Realització de diagrames de mecanismes.
ÍNDEX EL SÒLIDRIGID: forces externes i internes SÒLID RÍGID MOMENT D'UNA FORÇA Propietats del moment Propietats del moment II CONDICIONS D'EQUILIBRI DEL SÒLID RÍGID Eqüacions d'equilibri Eqüacions d'equilibri II DIAGRAMA DE SÒLID LLIURE DIAGRAMA DEL SÒLID LLIURE II Taula de recolzaments MÀQUINA I MECANISME BAULA, PARELL CINEMÀTIC I CADENA CINEMÀTICA GRAU DE LLIBERTAT CLASSIFICACIÓ DELS PARELLS CINEMÀTICS SIMBOLOGIA MECÀNICA NOMENCLATURA TIPUS DE MOVIMENT DELS MECANISMES EN EL PLA CADENES CINEMÀTIQUES CRITERIS DETERMINACIÓ DELS GL CRITERI ANALÍTIC DE GRÜBLER ESQUEMATITZACIÓ MECANISMES MÀQUINES SIMPLES PLA INCLINAT CÀLCUL PLA INCLINAT MECANISME CARGOL-FEMELLA MECANISME CARGOL-FEMELLA CÀLCUL CARGOL-FEMELLA PALANCA POLITGES TIPUS DE POLITGES POLIPAST ACTIVITATS MECANISMES MECANISMES TRANSMISSIÓ DEL MOVIMENT
3.
ÍNDEX MECANISMES TRANSMISSIÓDEL MOVIMENT TRANSMISSIÓ PER UNIÓ FLEXIBLE Tensors de politges Exemple : Conus de politges TRANSMISSIÓ PER UNIÓ FLEXIBLE Tren de politges TRANSMISSIÓ PER UNIÓ FLEXIBLE: CARDAN Elements junta Cardan TRANSMISSIÓ PER ENGRANATGES Tipus d’engranatges ENGRANATGE BOIG ENGRANATGES RECTES CARACTERÍSTIQUES E RECTES PARÀMETRES ENGR. RECTES PARÀMETRES ENGR. RECTES ENGRANATGES HELICOÏDALS ENGRANATGES CÒNICS PINYÓ-CREMALLERA VIS SENSE FI REPRESENTACIÓ GRÀFICA NORMALITZADA Representació gràfica II MECANISME DIFERENCIAL DIFERENCIAL LLEVES I EXCÈNTRIQUES ARBRE DE LLEVES MOTOR MECANISMES ARTICULATS BARRES ARTICULADES MECANISME BIELA-MANETA REGULADOR CENTRÍFUG DE WATT REGULADOR WATT CREU DE MALTA
4.
EL SÒLID RÍGID:forces externes i internes Sòlid rígid no es deforma sota la aplicació (sistema format de forces per moltes partícules) - Externes Forces que actuen sobre sòlid - Internes Forces externes : representen l’acció d’altres cossos sobre el SR. Responsables del seu comportament - Moviment de traslació - Movimient de rotació
5.
Moviment de traslació: quan totes les partícules descriuen trajectòries paral·leles. Moviment de rotació: quan totes les partícules descriuen trajectòries circulars alvoltant d’un eix de rotació. Forces internes : entre les partícules que formen el sòlid i mantenen unides aquestes partícules “forces de cohesió”. EL SÒLID RIGID
6.
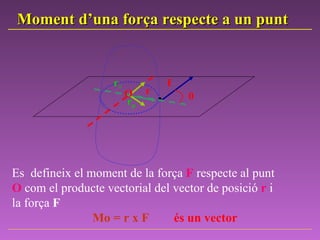
Moment d’una forçarespecte a un punt O F r r // r p θ Es defineix el moment de la força F respecte al punt O com el producte vectorial del vector de posició r i la força F Mo = r x F és un vector
7.
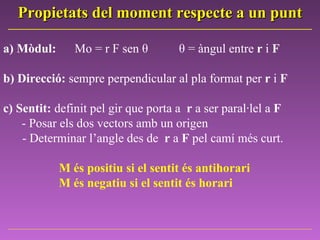
Propietats del momentrespecte a un punt a) Mòdul: Mo = r F sen θ θ = àngul entre r i F b) Direcció: sempre perpendicular al pla format per r i F c) Sentit: definit pel gir que porta a r a ser paral·lel a F - Posar els dos vectors amb un origen - Determinar l’angle des de r a F pel camí més curt. M és positiu si el sentit és antihorari M és negatiu si el sentit és horari
8.
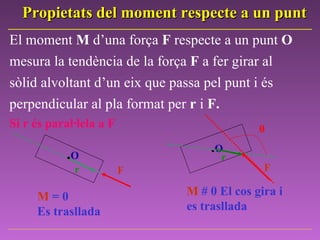
El moment M d’una força F respecte a un punt O mesura la tendència de la força F a fer girar al sòlid alvoltant d’un eix que passa pel punt i és perpendicular al pla format per r i F. Si r és paral·lela a F . O r F M = 0 Es trasllada . O θ F r M # 0 El cos gira i es trasllada Propietats del moment respecte a un punt
9.
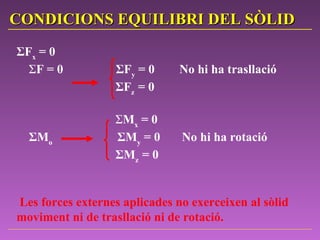
Σ F x = 0 Σ F = 0 Σ F y = 0 No hi ha trasllació ΣF z = 0 Σ M x = 0 Σ M o Σ M y = 0 No hi ha rotació ΣM z = 0 Les forces externes aplicades no exerceixen al sòlid moviment ni de trasllació ni de rotació. CONDICIONS EQUILIBRI DEL SÒLID
10.
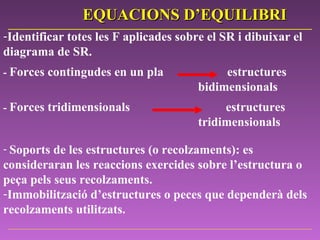
Identificar totesles F aplicades sobre el SR i dibuixar el diagrama de SR. - Forces contingudes en un pla estructures bidimensionals - Forces tridimensionals estructures tridimensionals Soports de les estructures (o recolzaments): es consideraran les reaccions exercides sobre l’estructura o peça pels seus recolzaments. Immobilització d’estructures o peces que dependerà dels recolzaments utilitzats. EQUACIONS D’EQUILIBRI
11.
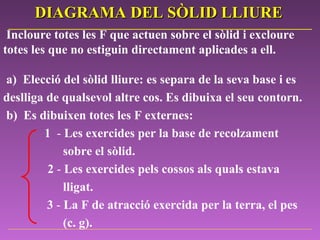
Incloure totesles F que actuen sobre el sòlid i excloure totes les que no estiguin directament aplicades a ell. a) Elecció del sòlid lliure: es separa de la seva base i es deslliga de qualsevol altre cos. Es dibuixa el seu contorn. b) Es dibuixen totes les F externes: 1 - Les exercides per la base de recolzament sobre el sòlid. 2 - Les exercides pels cossos als quals estava lligat. 3 - La F de atracció exercida per la terra, el pes (c. g). DIAGRAMA DEL SÒLID LLIURE
12.
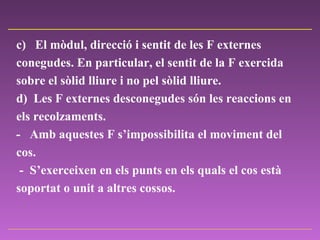
c) El mòdul, direcció i sentit de les F externes conegudes. En particular, el sentit de la F exercida sobre el sòlid lliure i no pel sòlid lliure. d) Les F externes desconegudes són les reaccions en els recolzaments. - Amb aquestes F s’impossibilita el moviment del cos. - S’exerceixen en els punts en els quals el cos està soportat o unit a altres cossos.
13.
14.
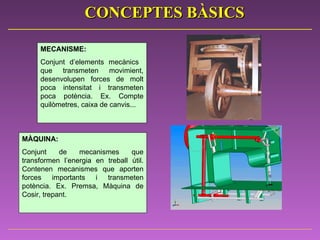
MECANISME: Conjunt d’elements mecànics que transmeten movimient, desenvolupen forces de molt poca intensitat i transmeten poca potència. Ex. Compte quilòmetres, caixa de canvis... MÀQUINA: Conjunt de mecanismes que transformen l’energia en treball útil. Contenen mecanismes que aporten forces importants i transmeten potència. Ex. Premsa, Màquina de Cosir, trepant. CONCEPTES BÀSICS
15.
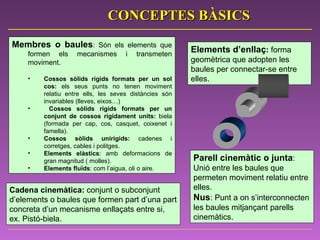
Elements d’enllaç : forma geomètrica que adopten les baules per connectar-se entre elles. Membres o baules : Són els elements que formen els mecanismes i transmeten moviment. Cossos sòlids rígids formats per un sol cos: els seus punts no tenen moviment relatiu entre ells, les seves distàncies són invariables (lleves, eixos…) Cossos sòlids rígids formats per un conjunt de cossos rígidament units: biela (formada per cap, cos, casquet, coixenet i famella). Cossos sòlids unirígids: cadenes i corretges, cables i politges. Elements elàstics : amb deformacions de gran magnitud ( molles). Elements fluïds : com l’aigua, oli o aire. Parell cinemàtic o junta : Unió entre les baules que permeten moviment relatiu entre elles. Nus : Punt a on s’interconnecten les baules mitjançant parells cinemàtics. CONCEPTES BÀSICS Cadena cinemàtica: conjunt o subconjunt d’elements o baules que formen part d’una part concreta d’un mecanisme enllaçats entre si, ex. Pistó-biela.
16.
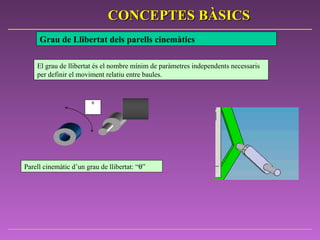
Grau de Llibertatdels parells cinemàtics Parell cinemàtic d’un grau de llibertat: “ ” El gra u de llibertat és el nombre mínim de paràmetres independents necessaris per definir el moviment relatiu entre baules. CONCEPTES BÀSICS
17.
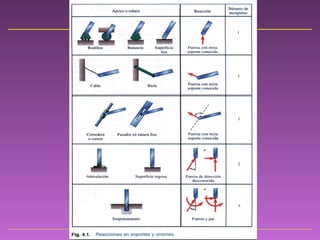
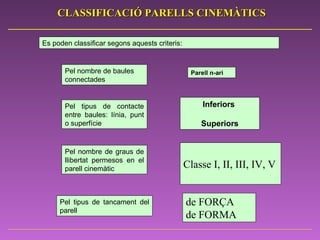
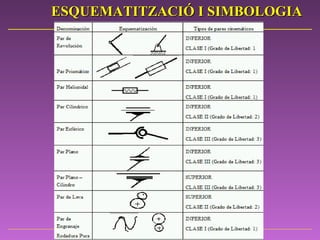
Es poden classificarsegons aquests criteris: Pel nombre de baules connectades Pel nombre de graus de llibertat permesos en el parell cinemàtic Pel tipus de contacte entre baules: línia, punt o superfície Pel tipus de tancament del parell Inferiors Superiors Classe I, II, III, IV, V Parell n-ari de FORÇA de FORMA CLASSIFICACIÓ PARELLS CINEMÀTICS
18.
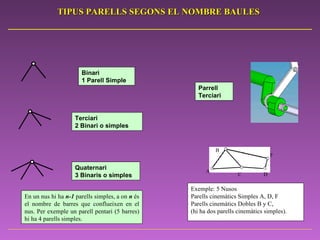
En un nushi ha n-1 parells simples, a on n és el nombre de barres que conflueixen en el nus. Per exemple un parell pentari (5 barres) hi ha 4 parells simples. Terciari 2 Binari o simples Quaternari 3 Binaris o simples Exemple: 5 Nusos Parells cinemàtics Simples A, D, F Parells cinemàtics Dobles B y C, (hi ha dos parells cinemàtics simples). Parrell Terciari TIPUS PARELLS SEGONS EL NOMBRE BAULES Binari 1 Parell Simple A C D F B
19.
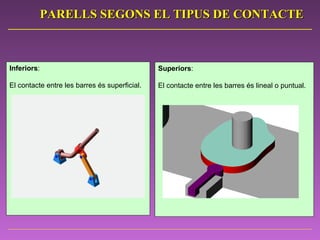
Inferiors : El contacte entre les barres és superficial. Superiors : El contacte entre les barres és lineal o puntual. PARELLS SEGONS EL TIPUS DE CONTACTE
20.
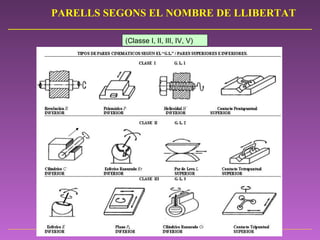
(Classe I, II,III, IV, V) PARELLS SEGONS EL NOMBRE DE LLIBERTAT
21.
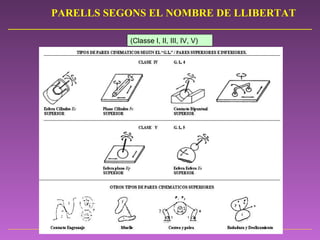
(Classe I, II,III, IV, V) PARELLS SEGONS EL NOMBRE DE LLIBERTAT
22.
PARELL de FORÇAPARELL de FORMA PARELLS SEGONS EL TIPUS DE TANCAMENT DEL PARELL
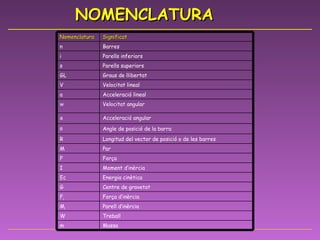
NOMENCLATURA Massa mTreball W Parell d’inèrcia M i Força d’inèrcia F i Centre de gravetat G Energia cinètica Ec Moment d’inèrcia I Força F Par M Longitud del vector de posició o de les barres R Angle de posició de la barra Acceleració angular a Velocitat angular w Acceleració lineal a Velocitat lineal V Graus de llibertat GL Parells superiors s Parells inferiors i Barres n Significat Nomenclatura
28.
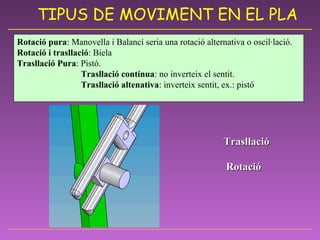
Rotació pura :Manovella i Balancí seria una rotació alternativa o oscil·lació. Rotació i trasllació : Biela Trasllació Pura : Pistó. Trasllació contínua : no inverteix el sentit. Trasllació altenativa : inverteix sentit, ex.: pistó Trasllació Rotació TIPUS DE MOVIMENT EN EL PLA
29.
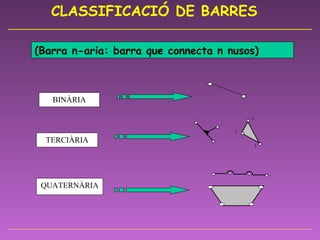
(Barra n-aria: barraque connecta n nusos) BINÀRIA TERCIÀRIA QUATERNÀRIA CLASSIFICACIÓ DE BARRES 1 2 3
30.
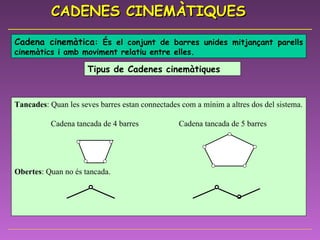
Tancades : Quanles seves barres estan connectades com a mínim a altres dos del sistema. Cadena tancada de 4 barres Cadena tancada de 5 barres Obertes : Quan no és tancada. Cadena cinemàtica : És el conjunt de barres unides mitjançant parells cinemàtics i amb moviment relatiu entre elles. Tipus de Cadenes cinemàtiques CADENES CINEMÀTIQUES
31.
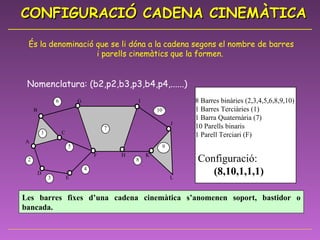
Nomenclatura: (b2,p2,b3,p3,b4,p4,......) CONFIGURACIÓCADENA CINEMÀTICA 8 Barres binàries (2,3,4,5,6,8,9,10) 1 Barres Terciàries (1) 1 Barra Quaternària (7) 10 Parells binaris 1 Parell Terciari (F) Configuració: (8,10,1,1,1) Les barres fixes d’una cadena cinemàtica s’anomenen soport, bastidor o bancada. És la denominació que se li dóna a la cadena segons el nombre de barres i parells cinemàtics que la formen. 2 3 4 1 5 7 9 8 10 6 A B C D E G I F H K J L
32.
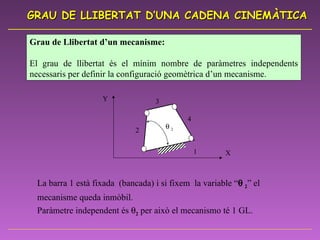
La barra 1està fixada (bancada) i si fixem la variable “ 2 ” el mecanisme queda inmòbil. Paràmetre independent és 2 per això el mecanismo té 1 GL. Grau de Llibertat d’un mecanisme : El gra u de l l iberta t é s el mínim nombre de paràmetres independents necessaris per definir la configuració geomètrica d’un mecanisme. GRAU DE LLIBERTAT D’UNA CADENA CINEMÀTICA 1 4 3 2 X Y 2
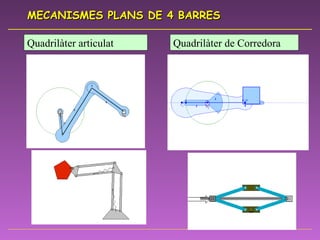
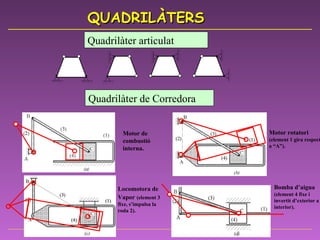
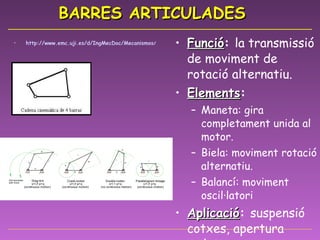
Quadrilàter articulat Quadrilàterde Corredora Motor de combustió interna. Locomotora de Vapor (element 3 fixe, s’impulsa la roda 2). Motor rotatori (element 1 gira respecte a “A”). Bomba d’aigua (element 4 fixe i invertit d’exterior a interior). QUADRILÀTERS
35.
Criteris analítics: Criteride Grübler– Kutzbach (o Chebyshev): Vàlid per mecanismes amb parells inferiors i superiors. - Criteri de Restricción: Vàlid per mecanismes que tenguin solament parells inferiors. Aquests dos criteris tenen errades, perque cap d’ells inclou l’anàlisi de la geometria dels mecanismes, ja que són analítics. Criteris no analítics: - Addició de grups d’Assur. CRITERIS DETERMINACIÓ DELS GL
36.
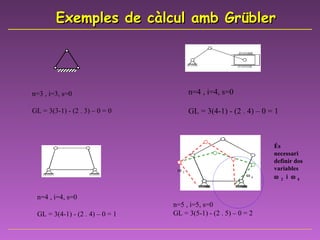
# GL =GL B S L – GL eliminats P I S BSL: Barres suposades lliures PIS: Parells Inferiors i Superiors Eqüació de Grübler GL = 3 (n-1) –(2 i) - s n - Nombre de barres i - parells inferiors s - parells superiors CRITERI DE GRÜBLER PEL CÀLCUL GL
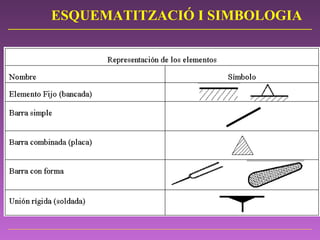
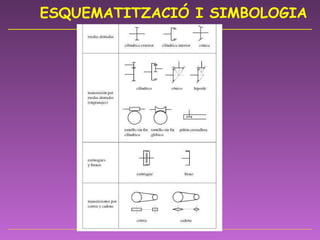
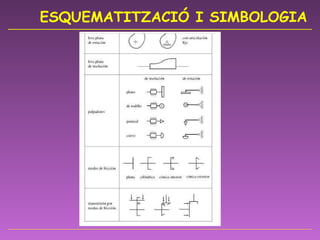
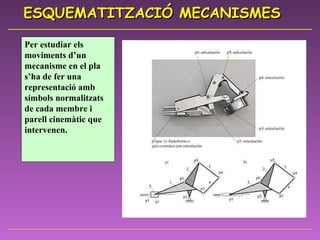
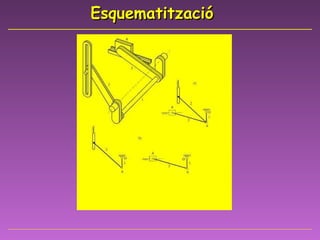
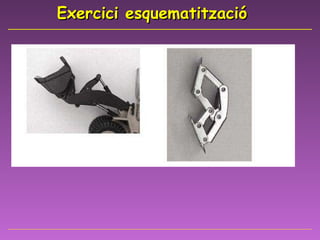
ESQUEMATITZACIÓ MECANISMES Perestudiar els moviments d’un mecanisme en el pla s’ha de fer una representació amb símbols normalitzats de cada membre i parell cinemàtic que intervenen.
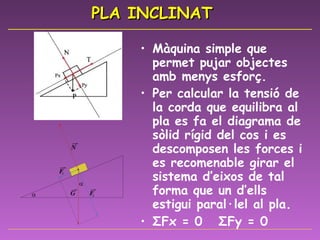
PLA INCLINAT Màquinasimple que permet pujar objectes amb menys esforç. Per calcular la tensió de la corda que equilibra al pla es fa el diagrama de sòlid rígid del cos i es descomposen les forces i es recomenable girar el sistema d’eixos de tal forma que un d’ells estigui paral·lel al pla. Σ Fx = 0 Σ Fy = 0
43.
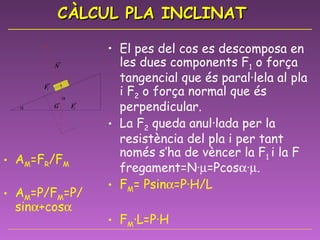
CÀLCUL PLA INCLINATEl pes del cos es descomposa en les dues components F 1 o força tangencial que és paral·lela al pla i F 2 o força normal que és perpendicular. La F 2 queda anul·lada per la resistència del pla i per tant només s’ha de vèncer la F 1 i la F fregament=N· =Pcos · . F M = Psin =P·H/L F M ·L=P·H F M =F1+F F = Psin + Pcos · A M =F R /F M A M =P/F M =P/ sin +cos
44.
MECANISME CARGOL-FEMELLA Ésl’aplicació del pla inclinat perquè la rosca és un pla inclinat que remunta una superfície cilíndrica. Mecanisme que transforma el moviment circular a lineal de forma irreversible. Si el cargol gira i es manté fixe la femella el cargol avança amb un moviment rectilini dintre d’aquesta. Tipus d’unió desmuntable més comú.
45.
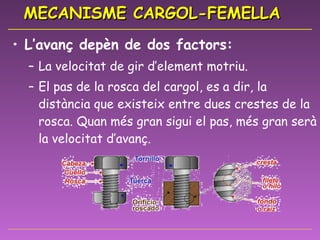
MECANISME CARGOL-FEMELLA L’avançdepèn de dos factors: La velocitat de gir d’element motriu. El pas de la rosca del cargol, es a dir, la distància que existeix entre dues crestes de la rosca. Quan més gran sigui el pas, més gran serà la velocitat d’avanç.
46.
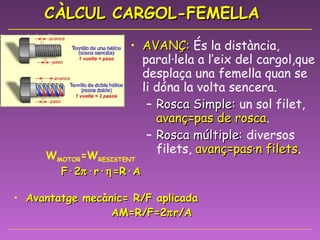
CÀLCUL CARGOL-FEMELLA WMOTOR =W RESISTENT F·2 ·r· =R·A Avantatge mecànic= R/F aplicada AM=R/F=2 r/A AVANÇ: És la distància, paral·lela a l’eix del cargol,que desplaça una femella quan se li dóna la volta sencera. Rosca Simple: un sol filet, avanç=pas de rosca . Rosca múltiple: diversos filets, avanç=pas·n filets .
47.
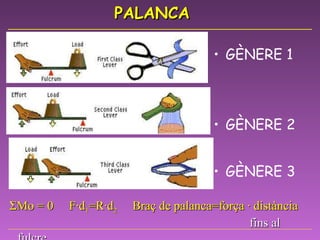
PALANCA GÈNERE 1 GÈNERE 2 GÈNERE 3 ΣMo = 0 F·d 1 =R·d 2 Braç de palanca=força · distància fins al fulcre
48.
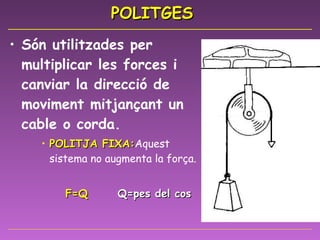
POLITGES Són utilitzadesper multiplicar les forces i canviar la direcció de moviment mitjançant un cable o corda. POLITJA FIXA: Aquest sistema no augmenta la força. F=Q Q=pes del cos
49.
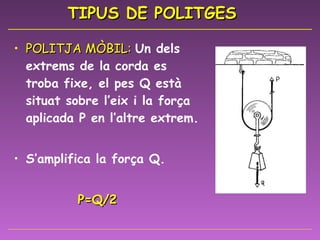
TIPUS DE POLITGESPOLITJA MÒBIL: Un dels extrems de la corda es troba fixe, el pes Q està situat sobre l’eix i la força aplicada P en l’altre extrem. S’amplifica la força Q. P=Q/2
50.
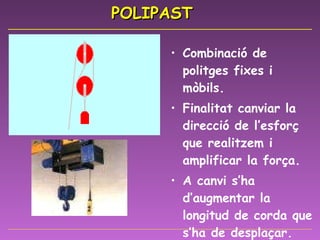
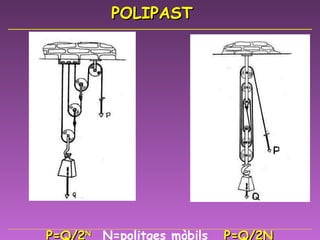
POLIPAST Combinació depolitges fixes i mòbils. Finalitat canviar la direcció de l’esforç que realitzem i amplificar la força. A canvi s’ha d’augmentar la longitud de corda que s’ha de desplaçar.
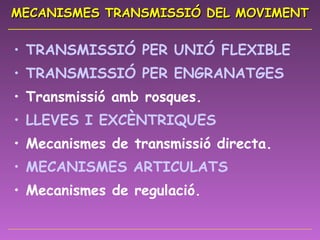
MECANISMES TRANSMISSIÓ DELMOVIMENT TRANSMISSIÓ PER UNIÓ FLEXIBLE TRANSMISSIÓ PER ENGRANATGES Transmissió amb rosques. LLEVES I EXCÈNTRIQUES Mecanismes de transmissió directa. MECANISMES ARTICULATS Mecanismes de regulació.
53.
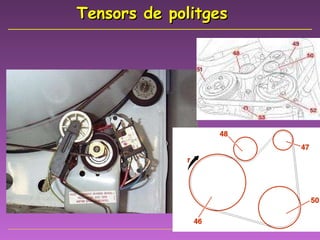
TRANSMISSIÓ PER UNIÓFLEXIBLE TRANSMISSIÓ PER CORRETJA/POLITJA . Funció: Transmissió indirecta del moviment entre arbres que estan separats. Elements Avantatge: permet un cert moviment vertical entre arbres i la transmissió a distància. Inconvenients: Lliscament i pèrdua entre 3-5% de potència. Hi ha corretges dentades per millorar el lliscament. Potències petites. Aplicacions: Canvi de velocitats trepant, corretja de distribució cotxe, rentadora...
TRANSMISSIÓ PER UNIÓFLEXIBLE TRANSMISSIÓ CADENA I ROD. DENTADES Funció Elements: cadena metàl·lica amb baules articulades i roda dentada. Avantatges: Transmissió grans potències, no hi ha lliscament, aplicació en gran distàncies entre arbres. Inconvenients: els arbres han de ser paral·lels, no suporten gran velocitats, són sorolloses i tenen desgast considerable necessiten lubrificació. Aplicacions: bicicleta. Càlcul: i=Z 2 /Z 1 Z=nombre de dents. i=relació de transmissió
57.
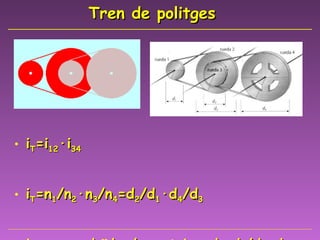
Tren de politgesi T =i 12 ·i 34 i T =n 1 /n 2 ·n 3 /n 4 =d 2 /d 1 ·d 4 /d 3 i T = p conduïdes/p motrius=d 2 ·d 4 /d 1 ·d 3
58.
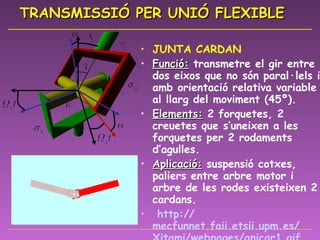
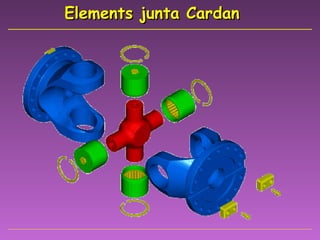
TRANSMISSIÓ PER UNIÓFLEXIBLE JUNTA CARDAN Funció: transmetre el gir entre dos eixos que no són paral·lels i amb orientació relativa variable al llarg del moviment (45º). Elements: 2 forquetes, 2 creuetes que s’uneixen a les forquetes per 2 rodaments d’agulles. Aplicació: suspensió cotxes, paliers entre arbre motor i arbre de les rodes existeixen 2 cardans. http:// mecfunnet.faii.etsii.upm.es / Xitami / webpages /anicar1. gif
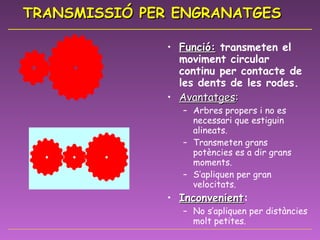
TRANSMISSIÓ PER ENGRANATGESFunció: transmeten el moviment circular continu per contacte de les dents de les rodes. Avantatges : Arbres propers i no es necessari que estiguin alineats. Transmeten grans potències es a dir grans moments. S’apliquen per gran velocitats. Inconvenient : No s’apliquen per distàncies molt petites.
61.
Tipus d’engranatges Engranatgeboig Engranatges rectes. Engranatges helicoïdals. Engranatges cònics. Engranatges interiors. Sistema Pinyó-Cremallera. Sistema caragol sense fi o vis sense fi
62.
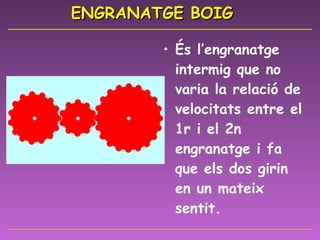
ENGRANATGE BOIG Ésl’engranatge intermig que no varia la relació de velocitats entre el 1r i el 2n engranatge i fa que els dos girin en un mateix sentit.
63.
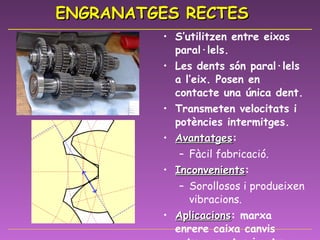
ENGRANATGES RECTES S’utilitzenentre eixos paral·lels. Les dents són paral·lels a l’eix. Posen en contacte una única dent. Transmeten velocitats i potències intermitges. Avantatges : Fàcil fabricació. Inconvenients : Sorollosos i produeixen vibracions. Aplicacions : marxa enrere caixa canvis cotxes, motos i cotxes de competició.
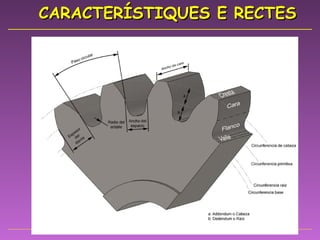
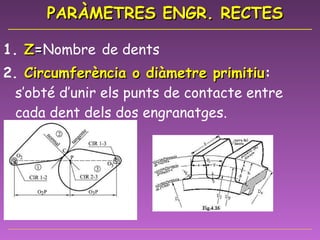
PARÀMETRES ENGR. RECTES1. Z = Nombre de dents 2. Circumferència o diàmetre primitiu : s’obté d’unir els punts de contacte entre cada dent dels dos engranatges.
66.
PARÀMETRES ENGR. RECTES3.Mòdul : són els mm del dp que correspon a cada dent. M=dp/Z 4. Pas : és la distància entre punts equivalents mesurats sobre el dp. Pas= longitud dp/Z=dp /Z=m· 5. Circumferència exterior: (de)=dp + 2m 6. Circumferència interior: (di)=dp - 2,5m 5.Característiques de les dents: Gruix: p/2 Cap: m Peu: 1,25m
67.
ENGRANATGES HELICOÏDALS Lesdents formen un angle amb l’eix de gir. S’utilitzen per eixos paral·lels i perpendiculars. Doble helicoïdal dóna més força. Avantatges : Es posen en contacte més una dent a l’hora amb un únic punt de contacte, hi ha més rodament i menys fricció i per això són silenciosos. Transmeten més velocitat. Inconvenient : És generen esforços axials en direcció de l’eix que no participen en el gir de les rodes i s’han d’aborvir mitjançant rodament i això fa que hi hagi una pèrdua de potència. Aplicacions : marxes de les caixes de canvis.
68.
ENGRANATGES CÒNICS Característiques: Eixos que es tallen 90º Poden tenir dents rectes o helicoïdals. Els vèrtex dels dos cons coindideixen en un punt per assegurar que el pas és el mateix. Avantatges : Transmeten esforços importants Inconvenients : Es generen forces axials que no s’aprofiten en el moviment. Aplicacions : Industrial.
69.
PINYÓ-CREMALLERA Funció : transformar el moviment circular continu en lineal continu mitjançant contacte directe i a l’inrevés. Elements : Cremallera Pinyó Aplicació : Portes de parking. Tren cremallera. Màquines eines. Càlculs : V=r· =dp/2· =m·Z/2·10 -3 · (m/s)
70.
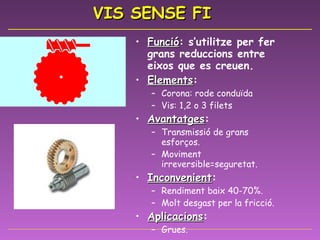
VIS SENSE FIFunció : s’utilitze per fer grans reduccions entre eixos que es creuen. Elements : Corona: rode conduïda Vis: 1,2 o 3 filets Avantatges : Transmissió de grans esforços. Moviment irreversible=seguretat. Inconvenient : Rendiment baix 40-70%. Molt desgast per la fricció. Aplicacions : Grues.
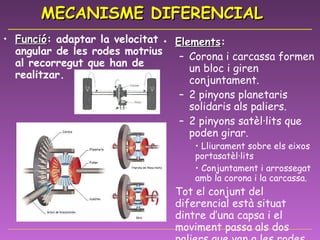
MECANISME DIFERENCIAL Funció: adaptar la velocitat angular de les rodes motrius al recorregut que han de realitzar. Elements : Corona i carcassa formen un bloc i giren conjuntament. 2 pinyons planetaris solidaris als paliers. 2 pinyons satèl·lits que poden girar. Lliurament sobre els eixos portasatèl·lits Conjuntament i arrossegat amb la corona i la carcassa. Tot el conjunt del diferencial està situat dintre d’una capsa i el moviment passa als dos paliers que van a les rodes.
74.
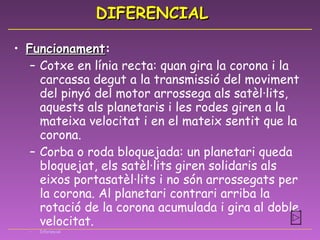
DIFERENCIAL Funcionament :Cotxe en línia recta: quan gira la corona i la carcassa degut a la transmissió del moviment del pinyó del motor arrossega als satèl·lits, aquests als planetaris i les rodes giren a la mateixa velocitat i en el mateix sentit que la corona. Corba o roda bloquejada: un planetari queda bloquejat, els satèl·lits giren solidaris als eixos portasatèl·lits i no són arrossegats per la corona. Al planetari contrari arriba la rotació de la corona acumulada i gira al doble velocitat. Diferencial
75.
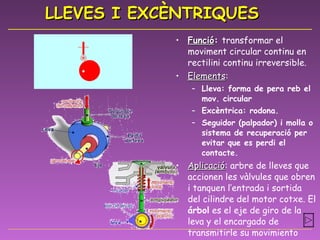
LLEVES I EXCÈNTRIQUESFunció : transformar el moviment circular continu en rectilini continu irreversible. Elements : Lleva: forma de pera reb el mov. circular Excèntrica: rodona. Seguidor (palpador) i molla o sistema de recuperació per evitar que es perdi el contacte. Aplicació : arbre de lleves que accionen les vàlvules que obren i tanquen l’entrada i sortida del cilindre del motor cotxe. El árbol es el eje de giro de la leva y el encargado de transmitirle su movimiento giratorio.
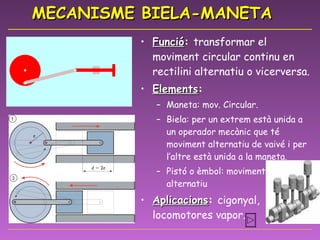
MECANISME BIELA-MANETA Funció: transformar el moviment circular continu en rectilini alternatiu o vicerversa. Elements : Maneta: mov. Circular. Biela: per un extrem està unida a un operador mecànic que té moviment alternatiu de vaivé i per l’altre està unida a la maneta. Pistó o èmbol: moviment rectilini alternatiu Aplicacions : cigonyal, locomotores vapor.
80.
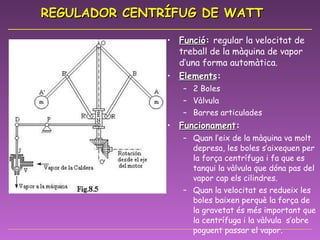
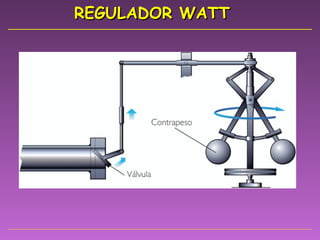
REGULADOR CENTRÍFUG DEWATT Funció : regular la velocitat de treball de la màquina de vapor d’una forma automàtica. Elements : 2 Boles Vàlvula Barres articulades Funcionament : Quan l’eix de la màquina va molt depresa, les boles s’aixequen per la força centrífuga i fa que es tanqui la vàlvula que dóna pas del vapor cap els cilindres. Quan la velocitat es redueix les boles baixen perquè la força de la gravetat és més important que la centrífuga i la vàlvula s’obre poguent passar el vapor.
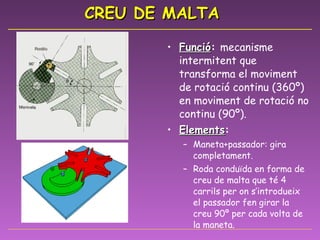
CREU DE MALTAFunció : mecanisme intermitent que transforma el moviment de rotació continu (360º) en moviment de rotació no continu (90º). Elements : Maneta+passador: gira completament. Roda conduïda en forma de creu de malta que té 4 carrils per on s’introdueix el passador fen girar la creu 90º per cada volta de la maneta.





















































![Circuitos rlc pri[1]](https://cdn.slidesharecdn.com/ss_thumbnails/circuitosrlcpri1-110724132551-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)

















































