08/03/2012 Unitat 8. Sistemes automàtics i de control 1
2.
INTRODUCCIÓ A LATECNOLOGIA DE CONTROL
• Automatitzar és reduir al mínim la participació humana en
l’accionament de les màquines o aparells o en la realització dels
processos.
• Les màquines i els processos poden ser:
Automàtics: la intervenció humana es limita a la posada en
marxa.
Ex: envasament de llet en tetra bricks, pintat d’un cotxe,...
Semiautomàtics: cal intervenció humana en alguna fase del
procés.
Ex: col·locació de fruita en caixes per mida, muntatge d’un
cotxe,...
• La tecnologia de control abasta tots els procediments i sistemes que
permeten d’automatitzar màquines, aparells i processos de
fabricació.
08/03/2012 Unitat 8. Sistemes automàtics i de control 2
3.
INTRODUCCIÓ A LATECNOLOGIA DE CONTROL
ORÍGENS DE L’AUTOMATITZACIÓ
POBLES PRIMITIUS:
Aplicacions de caça com l’arc, els forats a terra o els paranys
amb pedres o lloses.
EGIPTE DELS FARAONS:
Sistemes automàtics aplicats a l’arquitectura, basats en
l’obertura i el buidatge de dipòsits de sorra.
GRECS:
Clepsidra o temporitzador d’aigua.
Sistemes de politges i contrapesos per a l’obertura de portes.
08/03/2012 Unitat 8. Sistemes automàtics i de control 3
4.
INTRODUCCIÓ A LATECNOLOGIA DE CONTROL
ORÍGENS DE L’AUTOMATITZACIÓ
SEGLES XVII i XVIII:
Desenvolupament de les tècniques mecàniques amb l’aparició
dels autòmats (figures humanes o animals que es movien i
generaven so).
Regulador centrífug de boles de James Watt, que controla
l’entrada de vapor al cilindre de la màquina de vapor.
PRINCIPIS SEGLE XIX:
Teler programable de Joseph Marie Jacquard, precursor dels
ordinadors moderns, basat en la utilització de cartolines
perforades que contenien informació sobre el dibuix a teixir.
MITJANS SEGLE XIX:
Introducció de la tecnologia de l’electricitat i
l’electromagnetisme (invenció del relé electromagnètic).
08/03/2012 Unitat 8. Sistemes automàtics i de control 4
5.
INTRODUCCIÓ A LATECNOLOGIA DE CONTROL
ORÍGENS DE L’AUTOMATITZACIÓ
SEGLE XX:
Desenvolupament de la tecnologia elèctrica, electrònica i
microelectrònica.
Invenció del transistor i del circuit integrat o xip (milers de
transistors i resistències).
Desenvolupament del microprocessador (anys 70) que serà el
nucli de la major part dels automatismes programables.
Aparició de l’autòmat programables o PLC que controla la
gestió d’una màquina.
Desenvolupament de la robòtica, que integra diferents
tecnologies com ara l’electricitat, la mecànica, l’electrònica, la
informàtica, la sensòrica,...
08/03/2012 Unitat 8. Sistemes automàtics i de control 5
6.
INTRODUCCIÓ A LATECNOLOGIA DE CONTROL
OBJECTIUS DE L’AUTOMATITZACIÓ
Disminució dels costos de producció per:
Reducció de la ma d’obra.
Major aprofitament de les matèries primes.
Estalvi energètic.
Reducció o eliminació de treballs perillosos o repetitius (caldria una
ma d’obra altament qualificada, que demanaria un reciclatge de
formació permanent).
La millora en la qualitat final del producte, més durador i fiable:
Evitant l’error humà.
Realitzant un control de qualitat sobre totes les peces o els
components del producte (en el sistema clàssic es fa per mitjà
d’un mostreig)
08/03/2012 Unitat 8. Sistemes automàtics i de control 6
7.
INTRODUCCIÓ A LATECNOLOGIA DE CONTROL
OBJECTIUS DE L’AUTOMATITZACIÓ
Major precisió en la fabricació (les facultats humanes tenen una
limitació pel que fa a la velocitat de fabricació, complexitat en les
accions,...)
Una major disponibilitat a les demandes comercials, ja que la
fabricació flexible permet una adaptació ràpida a l’evolució del
mercat.
Amb tot això s’obté un producte final més competitiu.
08/03/2012 Unitat 8. Sistemes automàtics i de control 7
8.
ELS SISTEMES DECONTROL
• El concepte de control és molt ampli, va des del comandament d’una
aixeta que regula el pas d’aigua per una canonada fins a l manipulació
d’un robot en una cadena de muntatge.
• Entenem per sistema de control un conjunt d’elements que actuen
coordinadament per aconseguir una acció de govern dins d’un
procés, a través de la manipulació directa o indirecta de les
magnituds que hi intervenen.
Ex: regular el cabal d’aigua mitjançant una aixeta:
control manual giro a esquerra o dreta
control automàtic polsador temporitzat, rellotge
temporitzador,...
• Per tant podem afirmar que l’automatització d’un control no és res
més que un element extern afegit a una màquina o procés, que no
altera les seves característiques de funcionament però si aporta unes
millores en costos i qualitat.
08/03/2012 Unitat 8. Sistemes automàtics i de control 8
9.
ELS SISTEMES DECONTROL
SISTEMES DE CONTROL AUTOMÀTIC
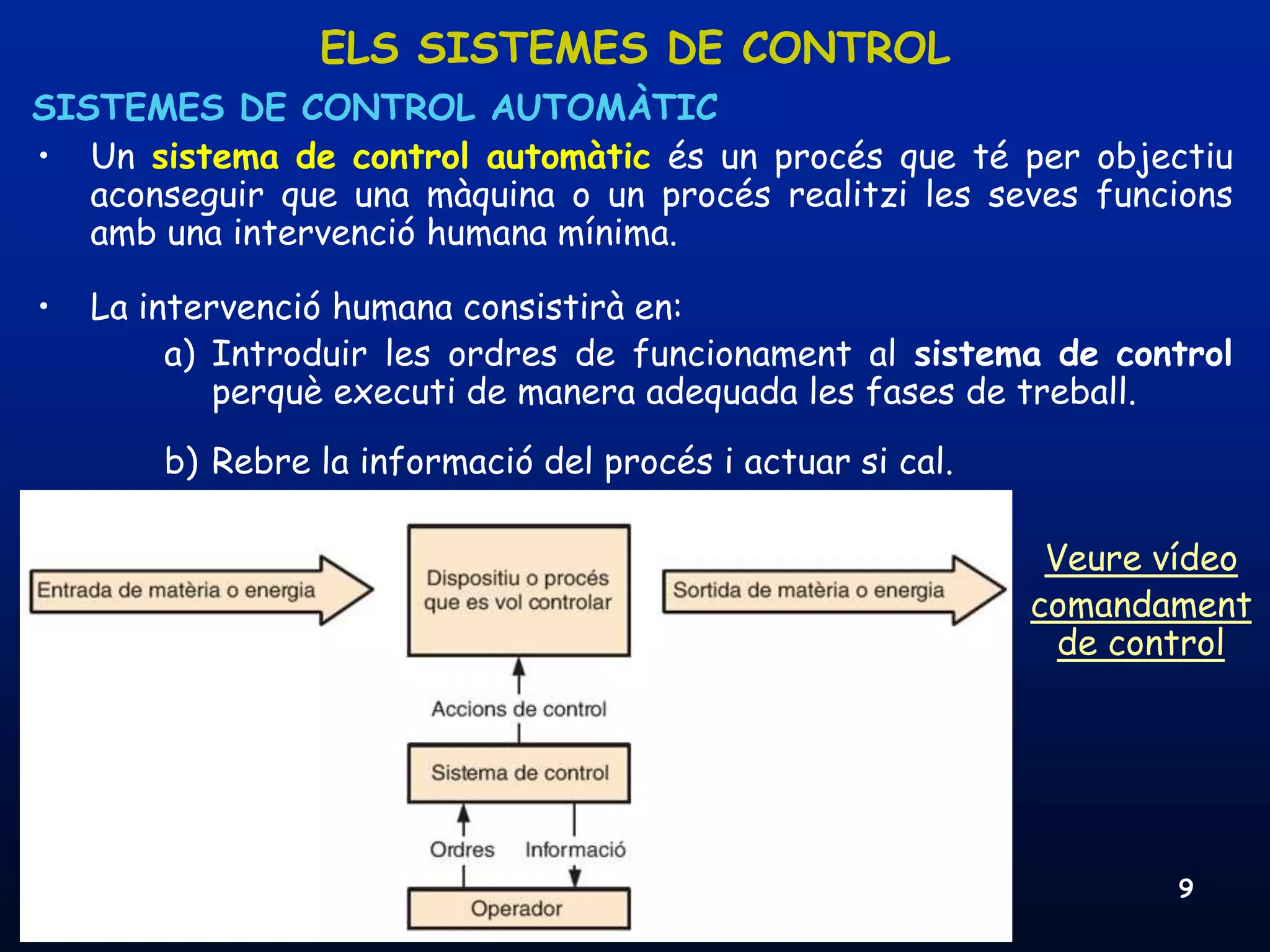
• Un sistema de control automàtic és un procés que té per objectiu
aconseguir que una màquina o un procés realitzi les seves funcions
amb una intervenció humana mínima.
• La intervenció humana consistirà en:
a) Introduir les ordres de funcionament al sistema de control
perquè executi de manera adequada les fases de treball.
b) Rebre la informació del procés i actuar si cal.
Veure vídeo
comandament
de control
08/03/2012 Unitat 8. Sistemes automàtics i de control 9
10.
ELS SISTEMES DECONTROL
SISTEMES DE CONTROL AUTOMÀTIC
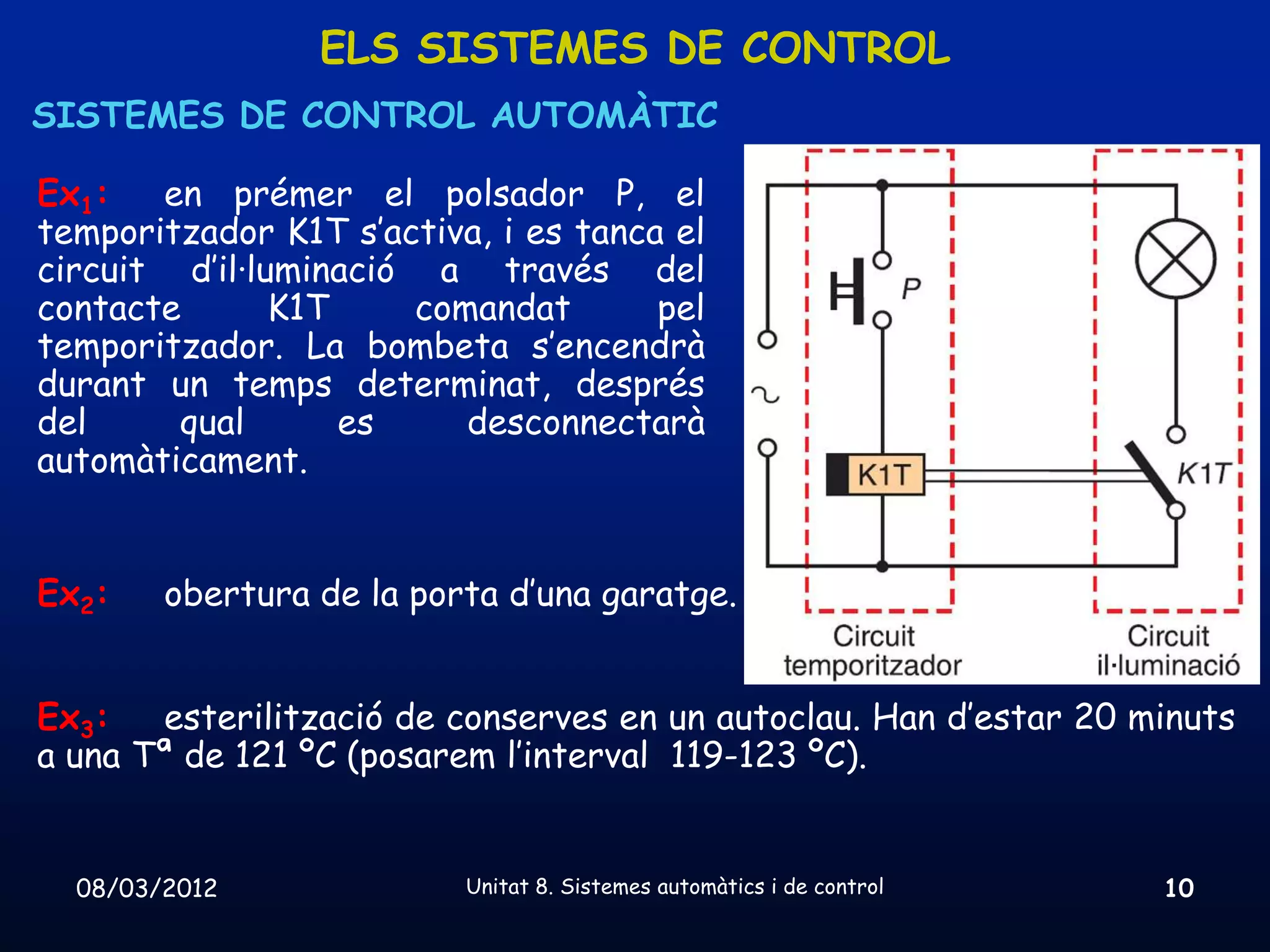
Ex1: en prémer el polsador P, el
temporitzador K1T s’activa, i es tanca el
circuit d’il·luminació a través del
contacte K1T comandat pel
temporitzador. La bombeta s’encendrà
durant un temps determinat, després
del qual es desconnectarà
automàticament.
Ex2: obertura de la porta d’una garatge.
Ex3: esterilització de conserves en un autoclau. Han d’estar 20 minuts
a una Tª de 121 ºC (posarem l’interval 119-123 ºC).
08/03/2012 Unitat 8. Sistemes automàtics i de control 10
11.
ELS SISTEMES DECONTROL
TECNOLOGIES CABLADES I PROGRAMABLES
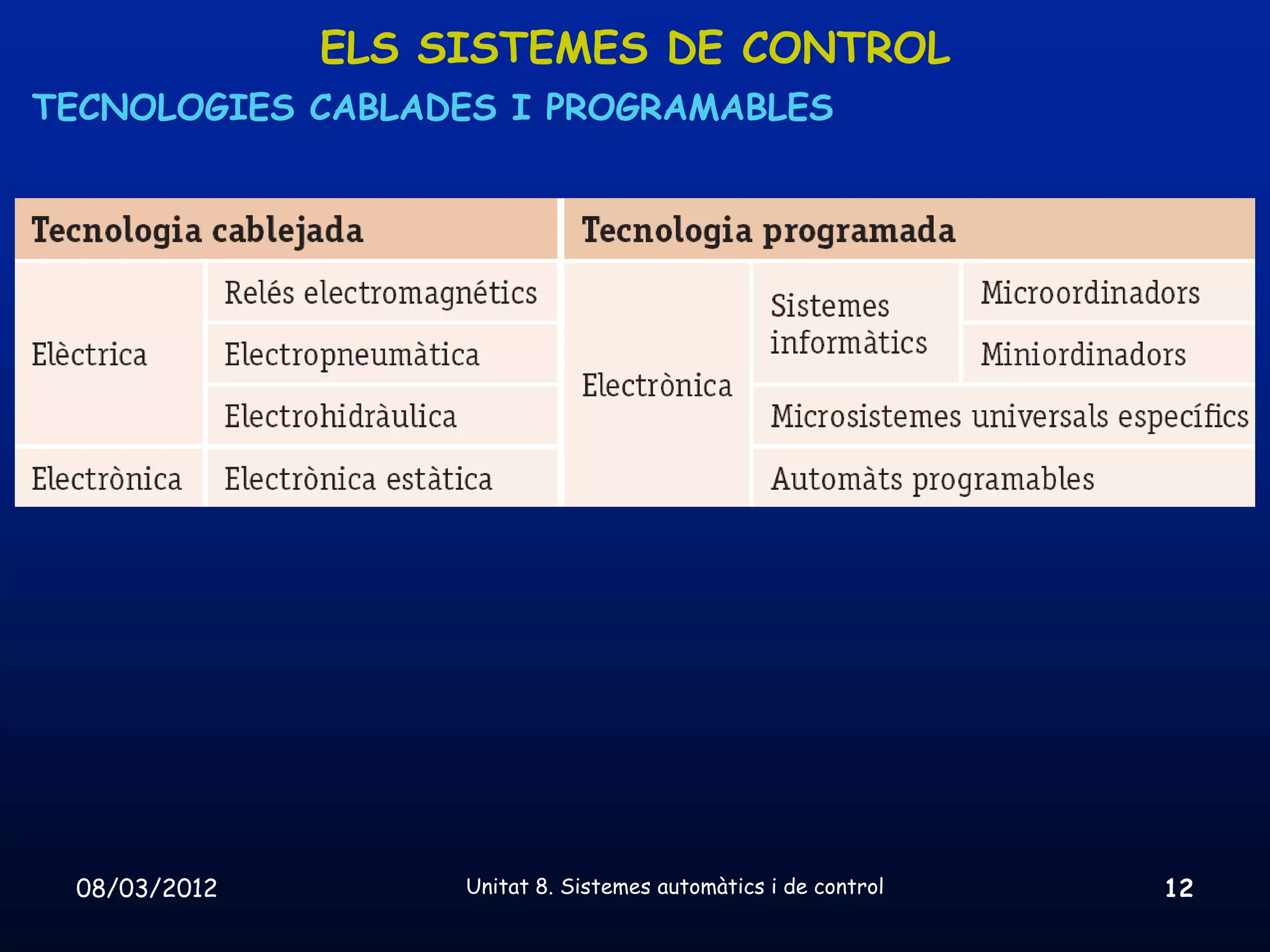
• La tecnologia cablada s’aplica a dispositius
pneumàtics, hidràulics, elèctrics i electrònics.
Es du a terme a partir d’unions físiques dels elements que formen el
sistema de control. Els seus principals inconvenients són:
És poc flexible davant de futures modificacions i ampliacions.
En general ocupa molt espai.
No permet efectuar funcions de control complexes.
Resulta difícil localitzar i resoldre avaries.
Es poc adaptable, ja que la única manera d’alterar la funció de
control és modificant els seus components o la manera
d’interconnectar-los.
• La tecnologia programable gaudeix de gran quantitat d’avantatges.
És molt adaptable i pot realitzar diferents funcions de control sense
alterar la seva configuració física, només canviant el programa de
control.
08/03/2012 Unitat 8. Sistemes automàtics i de control 11
12.
ELS SISTEMES DECONTROL
TECNOLOGIES CABLADES I PROGRAMABLES
08/03/2012 Unitat 8. Sistemes automàtics i de control 12
13.
ELS SISTEMES DECONTROL
ELS SENYALS EN ELS SISTEMES DE CONTROL
• La majoria de sistemes de control treballen amb senyals
elèctrics, els quals, atenent a la naturalesa d’aquests senyals, poden
ser:
Sistemes analògics: treballen amb senyals de tipus continu.
Solen representar magnituds físiques del procés (Tª, P, v,...). En
aquest cas la tensió o intensitat del senyal serà proporcional al
valor de la magnitud.
Sistemes digitals: treballen amb senyals de tipus tot o res
(binaris). Només poden representar dos estats o nivells: obert o
tancat, activat o desactivat, condueixen o no condueixen,...
Aquests nivells solen representar-se per variables lògiques o bits
(valor 0 o 1).
08/03/2012 Unitat 8. Sistemes automàtics i de control 13
14.
ELS SISTEMES DECONTROL
ELS SENYALS EN ELS SISTEMES DE CONTROL
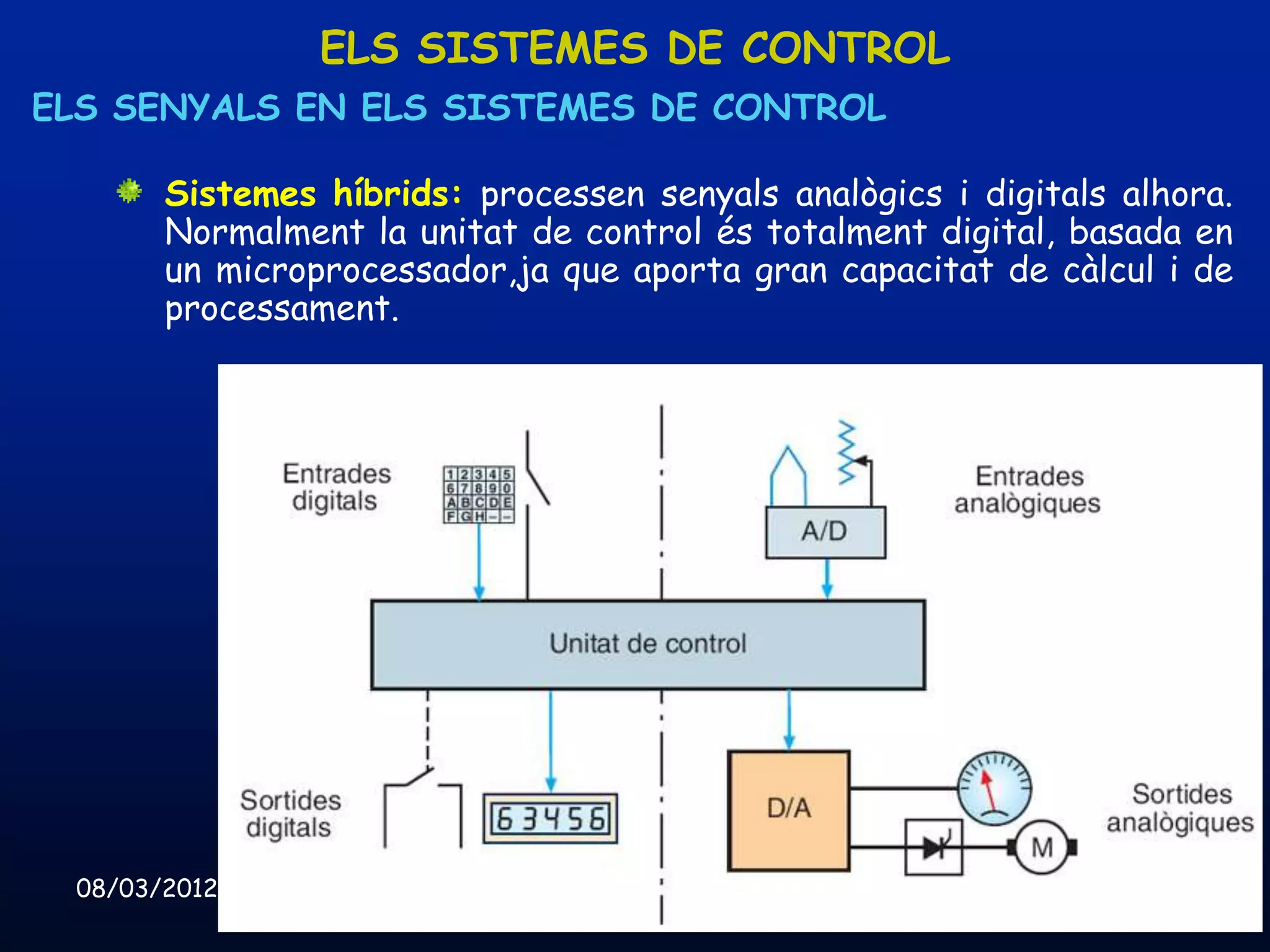
Sistemes híbrids: processen senyals analògics i digitals alhora.
Normalment la unitat de control és totalment digital, basada en
un microprocessador,ja que aporta gran capacitat de càlcul i de
processament.
08/03/2012 Unitat 8. Sistemes automàtics i de control 14
15.
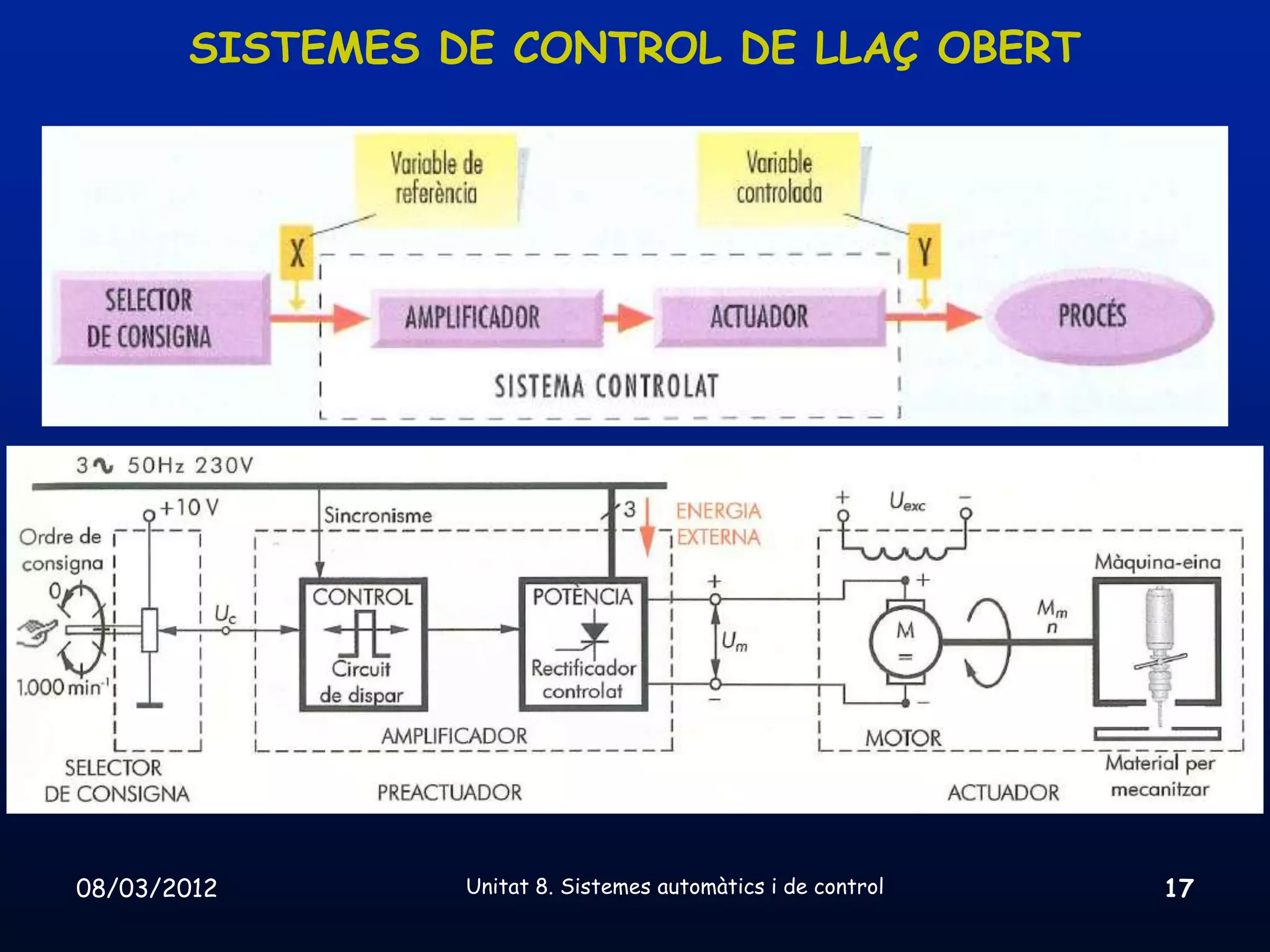
SISTEMES DE CONTROLDE LLAÇ OBERT
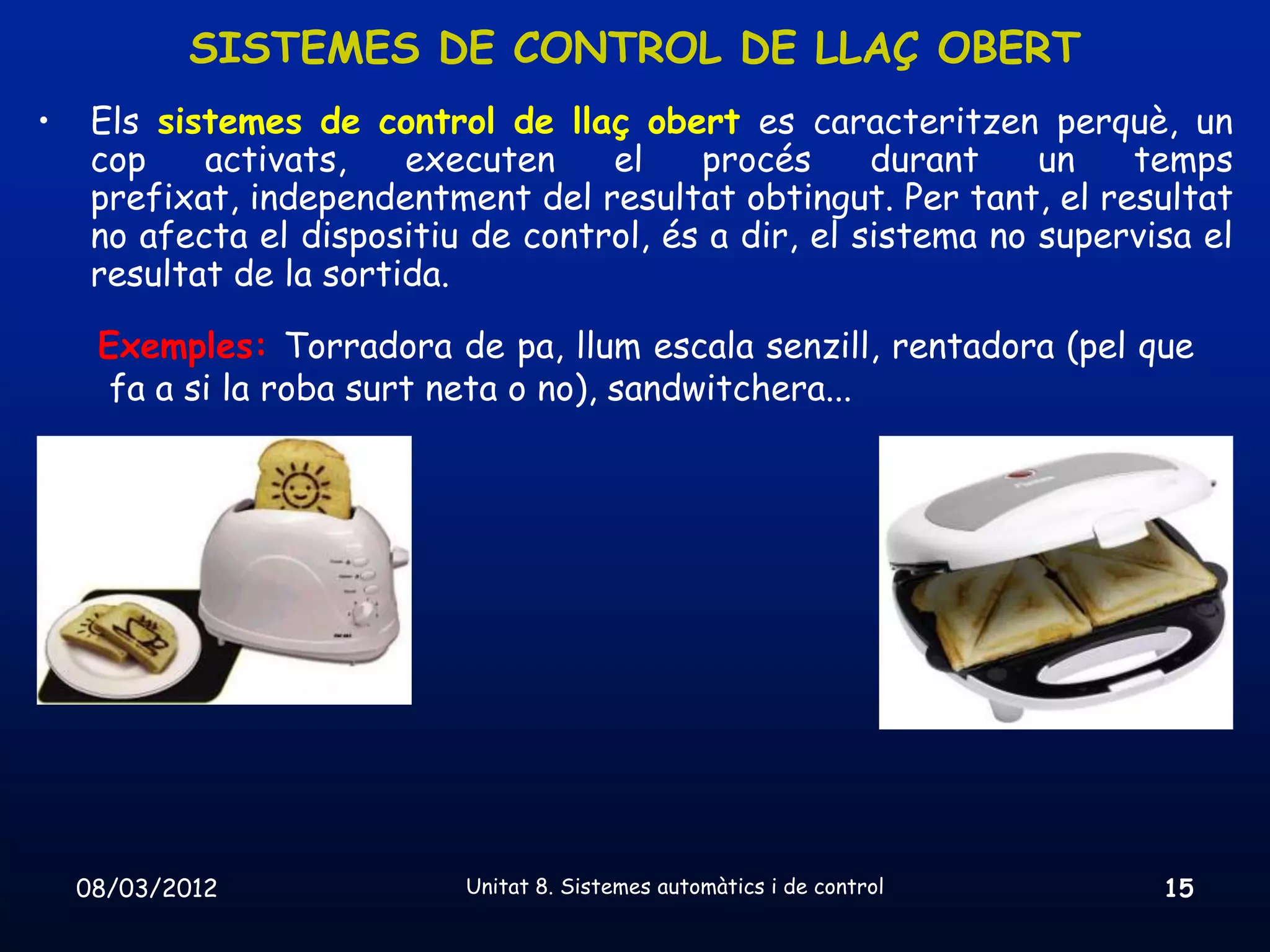
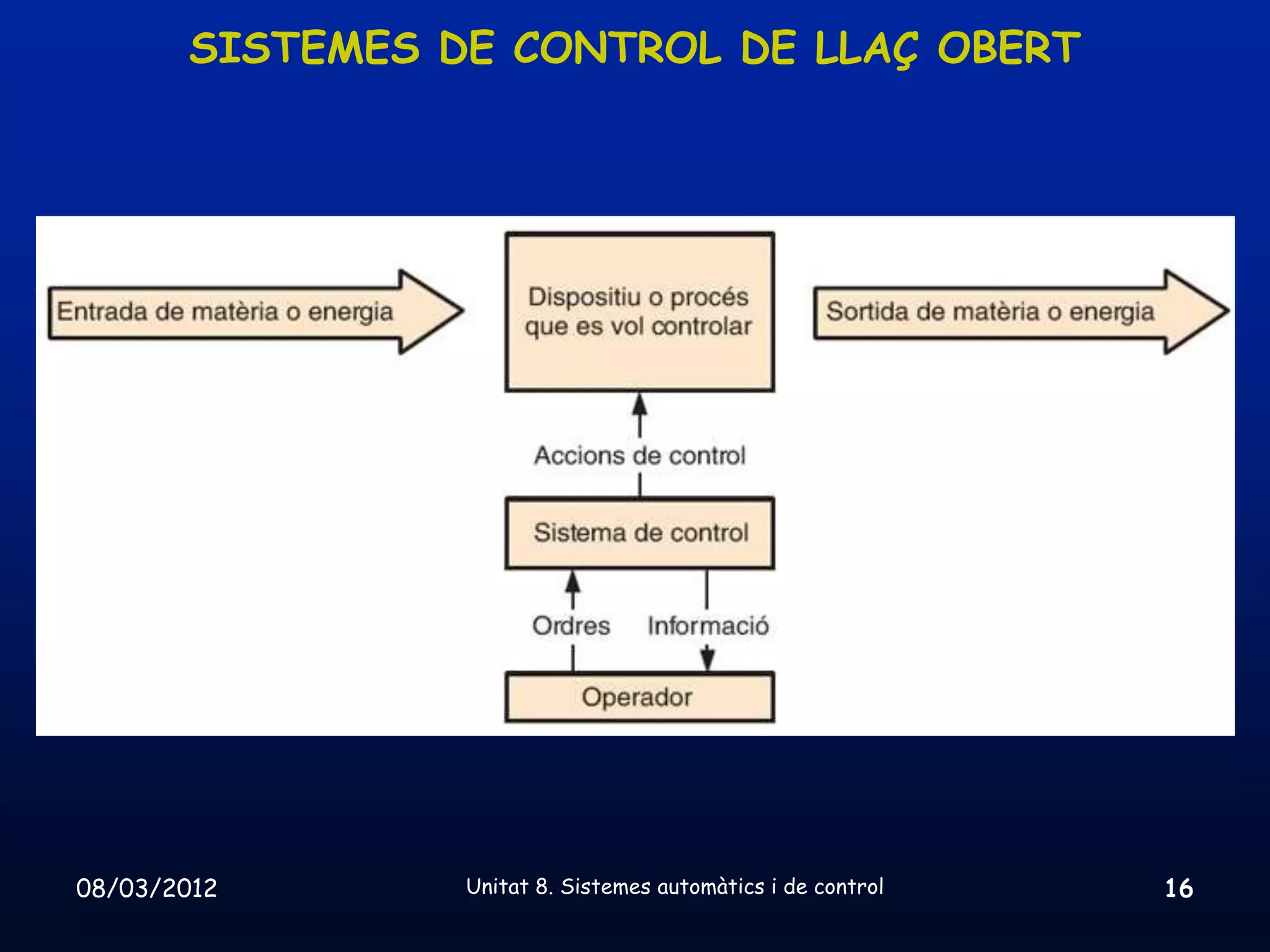
• Els sistemes de control de llaç obert es caracteritzen perquè, un
cop activats, executen el procés durant un temps
prefixat, independentment del resultat obtingut. Per tant, el resultat
no afecta el dispositiu de control, és a dir, el sistema no supervisa el
resultat de la sortida.
Exemples: Torradora de pa, llum escala senzill, rentadora (pel que
fa a si la roba surt neta o no), sandwitchera...
08/03/2012 Unitat 8. Sistemes automàtics i de control 15
16.
SISTEMES DE CONTROLDE LLAÇ OBERT
08/03/2012 Unitat 8. Sistemes automàtics i de control 16
17.
SISTEMES DE CONTROLDE LLAÇ OBERT
08/03/2012 Unitat 8. Sistemes automàtics i de control 17
18.
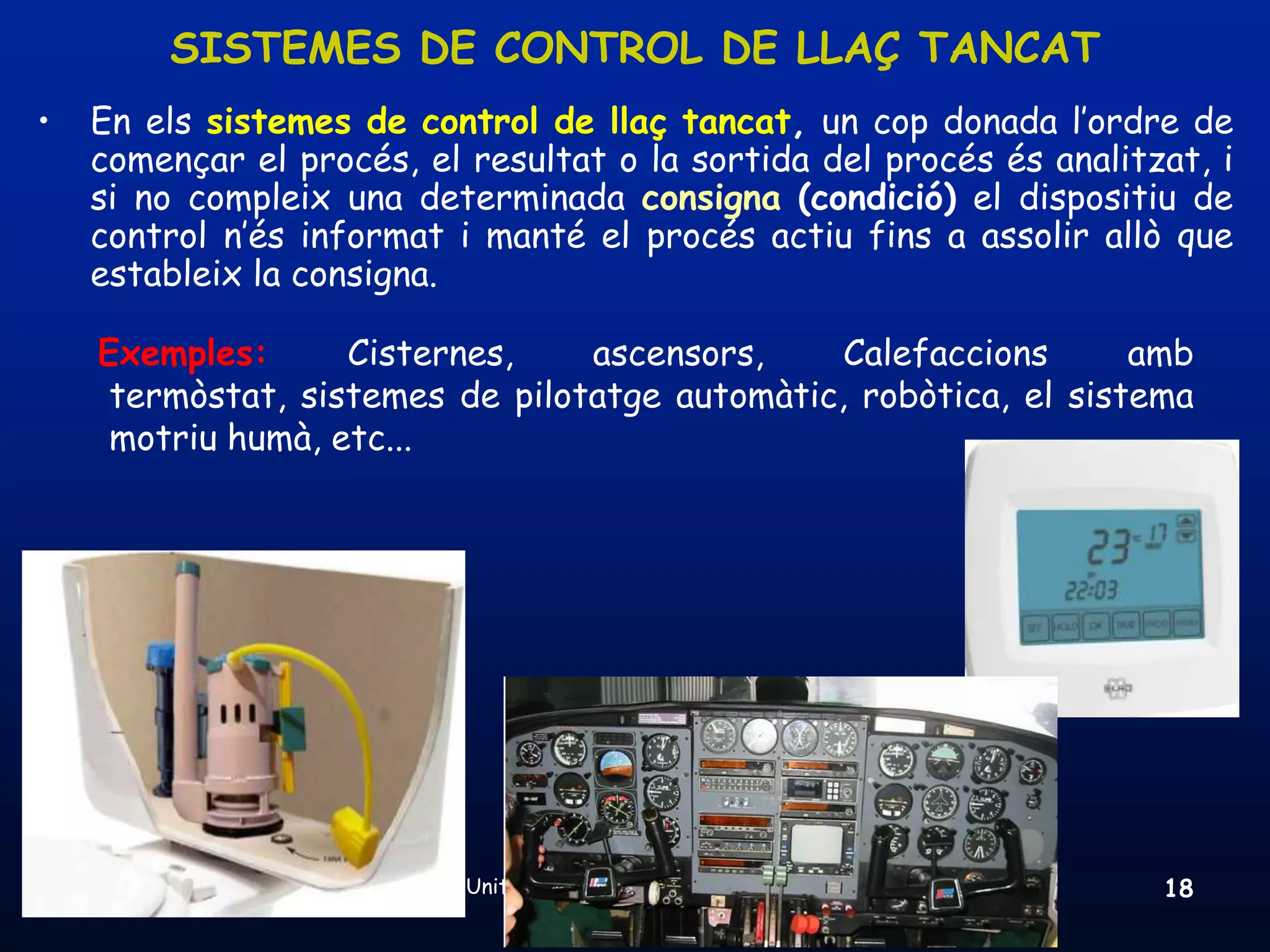
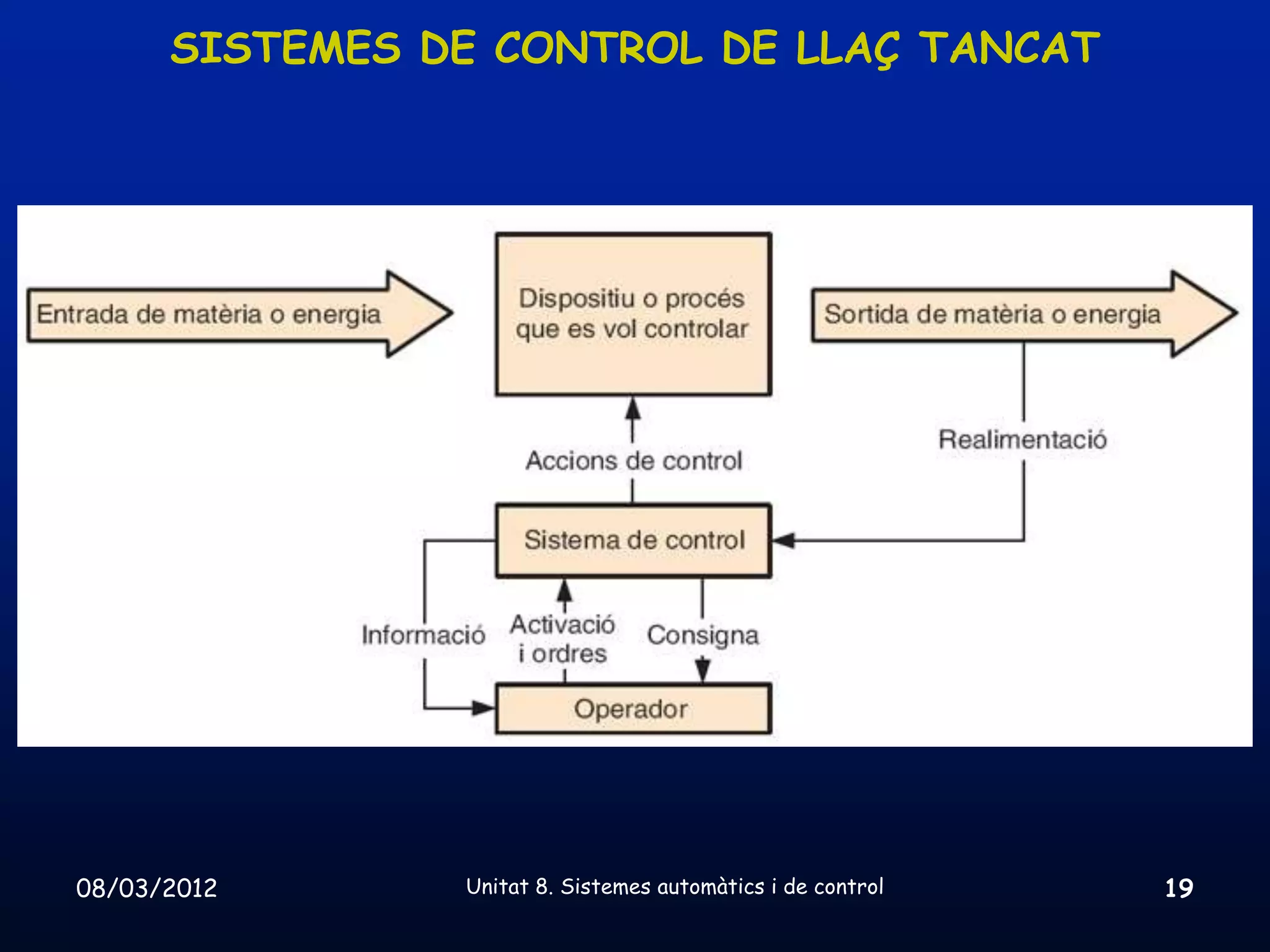
SISTEMES DE CONTROLDE LLAÇ TANCAT
• En els sistemes de control de llaç tancat, un cop donada l’ordre de
començar el procés, el resultat o la sortida del procés és analitzat, i
si no compleix una determinada consigna (condició) el dispositiu de
control n’és informat i manté el procés actiu fins a assolir allò que
estableix la consigna.
Exemples: Cisternes, ascensors, Calefaccions amb
termòstat, sistemes de pilotatge automàtic, robòtica, el sistema
motriu humà, etc...
08/03/2012 Unitat 8. Sistemes automàtics i de control 18
19.
SISTEMES DE CONTROLDE LLAÇ TANCAT
08/03/2012 Unitat 8. Sistemes automàtics i de control 19
20.
SISTEMES DE CONTROLDE LLAÇ TANCAT
08/03/2012 Unitat 8. Sistemes automàtics i de control 20
21.
SISTEMES DE CONTROLDE LLAÇ TANCAT
Exemple: dutxa
• Procés a controlar: el fet de dutxar-se.
• Entrada de matèria o energia: aigua que surt per la dutxa.
• Variables que cal controlar (sortides): Temperatura (T) i cabal (Q).
• Sensors o captadors de dades de les sortides:
• Per T receptors nerviosos de la pell.
• Per Q receptors nerviosos de la pell (per la pressió) i ulls.
• Controlador (part del sistema de control): el cervell. Els sensors
envien informació (senyals d’entrada) al nostre cervell i aquest
decideix si l’aigua està calenta o freda i si el cabal és o no l’adequat.
• Senyal corrector: el cervell compara la informació amb les
condicions desitjables (CONSIGNA) i pren la decisió adequada en
forma de impulsos nerviosos (aigua freda mou comandament de
l’aigua calenta). Aquest és el senyal corrector, que s’envia a través
dels nervis fins als braços i mans.
• Actuadors: els comandaments. Actuen sobre el procés variant T i Q.
• Informació: la persona que es dutxa pot transmetre com està l’aiuda
a algú que pregunti.
08/03/2012 Unitat 8. Sistemes automàtics i de control 21
22.
SISTEMES DE CONTROLDE LLAÇ TANCAT
Exemple: control de la temperatura en un forn
• Procés a controlar: temperatura del forn igual a un valor T= x ºc
(seleccionat mitjançant el selector de T.
• Entrada de matèria o energia: energia elèctrica.
• Variables que cal controlar (sortides): Temperatura (T).
• Sensors o captadors de dades de les sortides:
• Per T sensor de temperatura (termoparell).
• Controlador (part del sistema de control): Termòstat
• Senyal corrector: el termòstat envia senyal perquè per les
resistències passí més o menys intensitat (s'escalfaran en funció
d'aquesta).
• Actuadors: resistències elèctriques
• Preactuadors: relés
• Informació: display que em mostra la T en pantalla.
08/03/2012 Unitat 8. Sistemes automàtics i de control 22
23.
SISTEMES DE CONTROLDE LLAÇ TANCAT
Exemple: rentadora
• Procés a controlar
• Entrada de matèria o energia
• Variables que cal controlar (sortides)
• Sensors o captadors de dades de les sortides
• Controlador (part del sistema de control)
• Senyal corrector
• Actuadors
• Informació
08/03/2012 Unitat 8. Sistemes automàtics i de control 23
24.
SISTEMES DE CONTROLDE LLAÇ TANCAT
AVANTATGES D’UN SISTEMA DE LLAÇ TANCAT vs UN DE LLAÇ OBERT
Augmenta la precisió o exactitud del control la sortida va variant
fins assolir el valor de consigna. En canvi en sistemes de llaç obert
podem obtenir sortides indesitjables.
Són menys sensibles a les variacions dels paràmetres del procés, ja
que supervisen contínuament la sortida i poden compensar-ne els
canvis.
Provoquen un augment de la velocitat de resposta del sistema.
INCONVENIENTS D’UN SISTEMA DE LLAÇ TANCAT vs UN DE LLAÇ OBERT
Són més complexos.
Són més cars.
08/03/2012 Unitat 8. Sistemes automàtics i de control 24
25.
SISTEMES DE CONTROLDE LLAÇ TANCAT
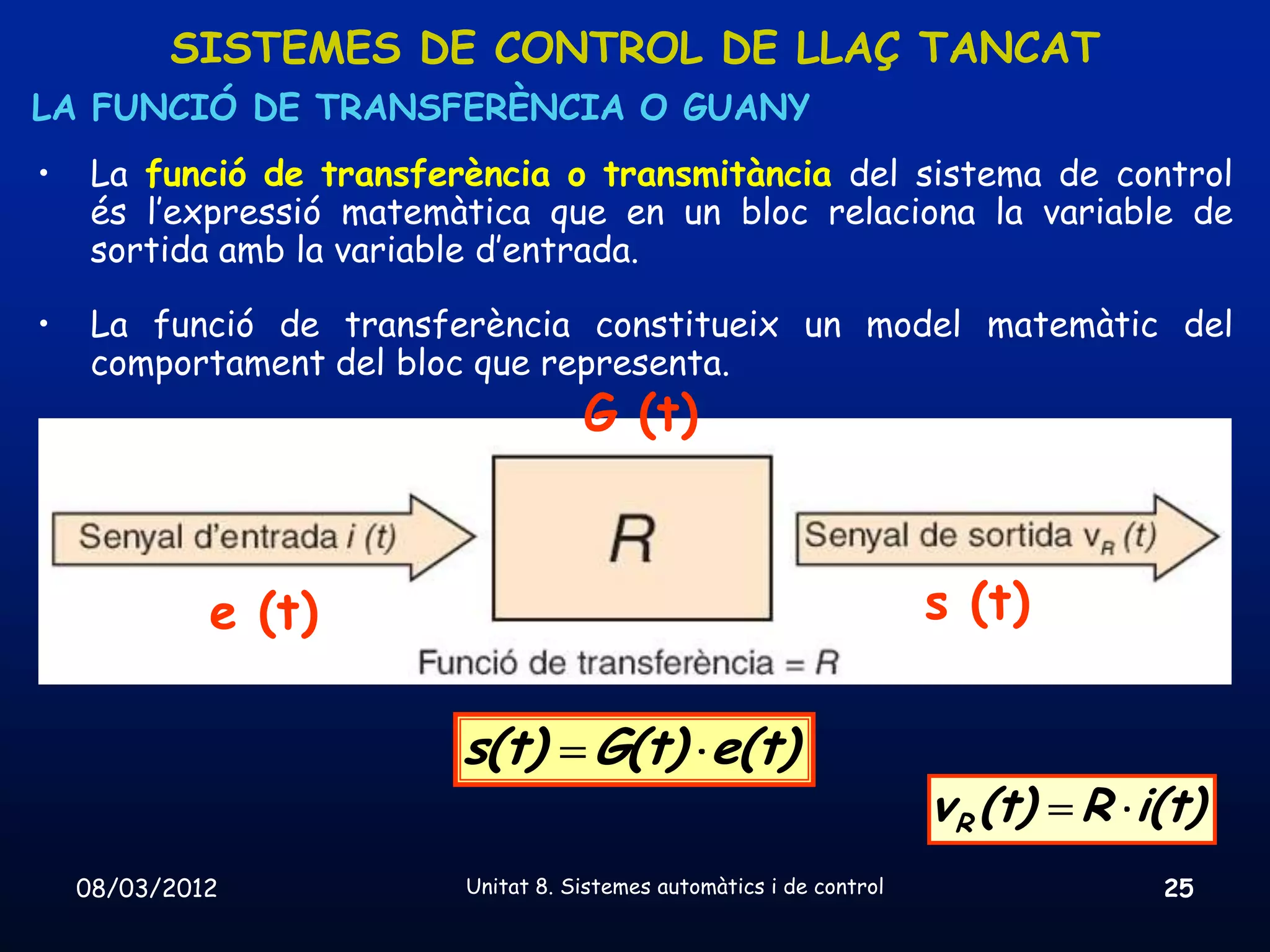
LA FUNCIÓ DE TRANSFERÈNCIA O GUANY
• La funció de transferència o transmitància del sistema de control
és l’expressió matemàtica que en un bloc relaciona la variable de
sortida amb la variable d’entrada.
• La funció de transferència constitueix un model matemàtic del
comportament del bloc que representa.
G (t)
e (t) s (t)
s(t) G(t) e(t)
v R (t) R i(t)
08/03/2012 Unitat 8. Sistemes automàtics i de control 25
26.
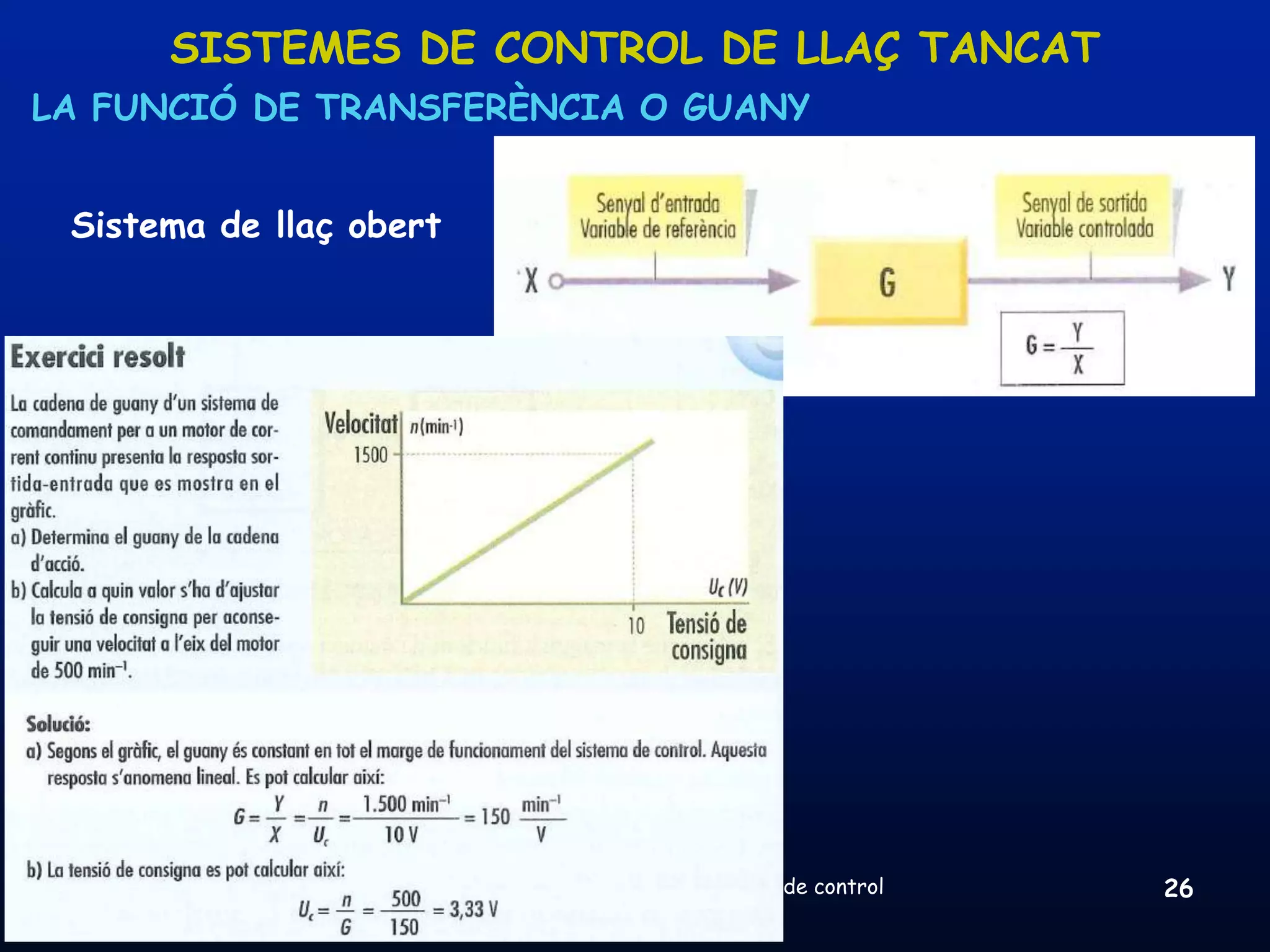
SISTEMES DE CONTROLDE LLAÇ TANCAT
LA FUNCIÓ DE TRANSFERÈNCIA O GUANY
Sistema de llaç obert
08/03/2012 Unitat 8. Sistemes automàtics i de control 26
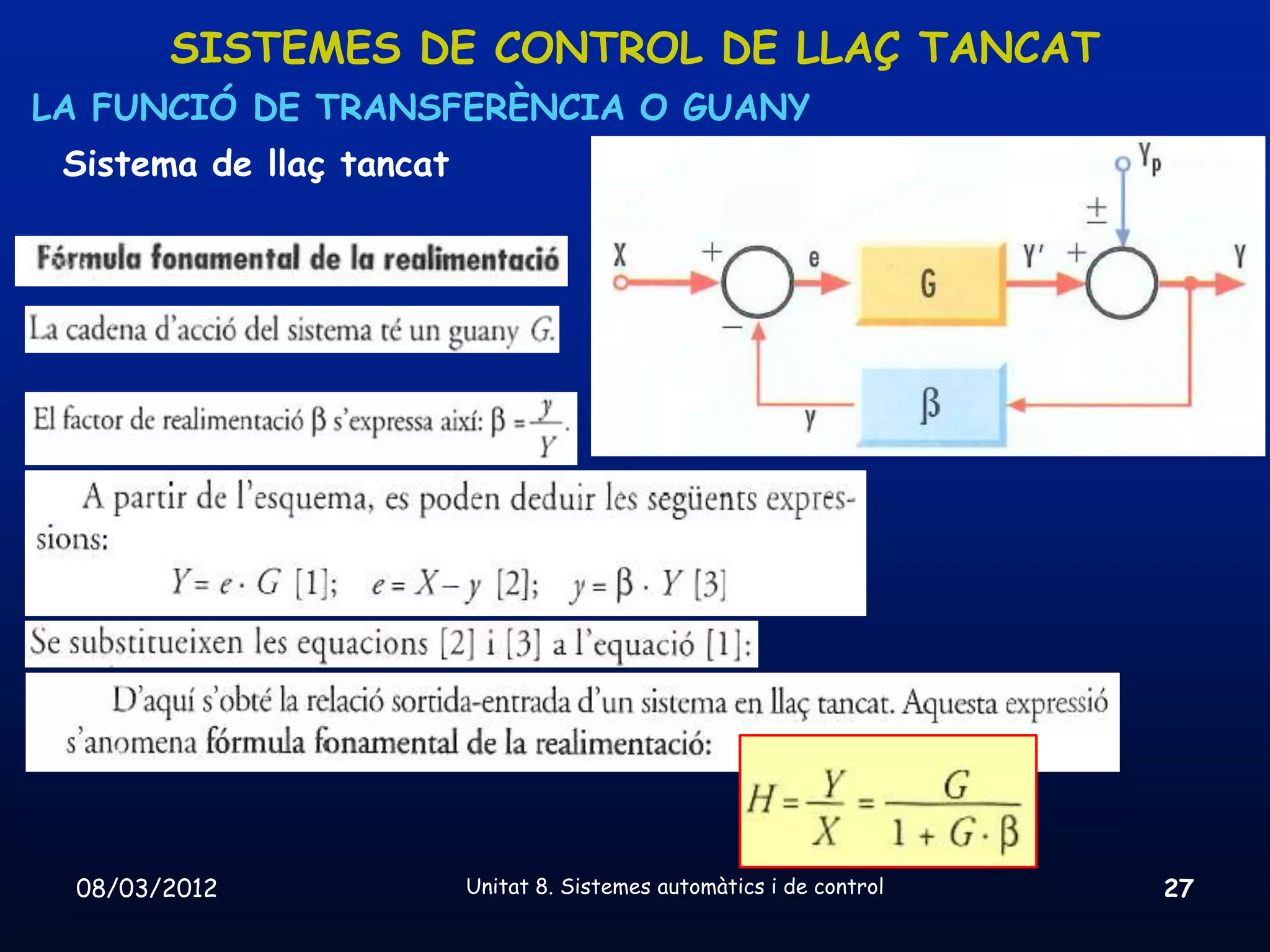
27.
SISTEMES DE CONTROLDE LLAÇ TANCAT
LA FUNCIÓ DE TRANSFERÈNCIA O GUANY
Sistema de llaç tancat
08/03/2012 Unitat 8. Sistemes automàtics i de control 27
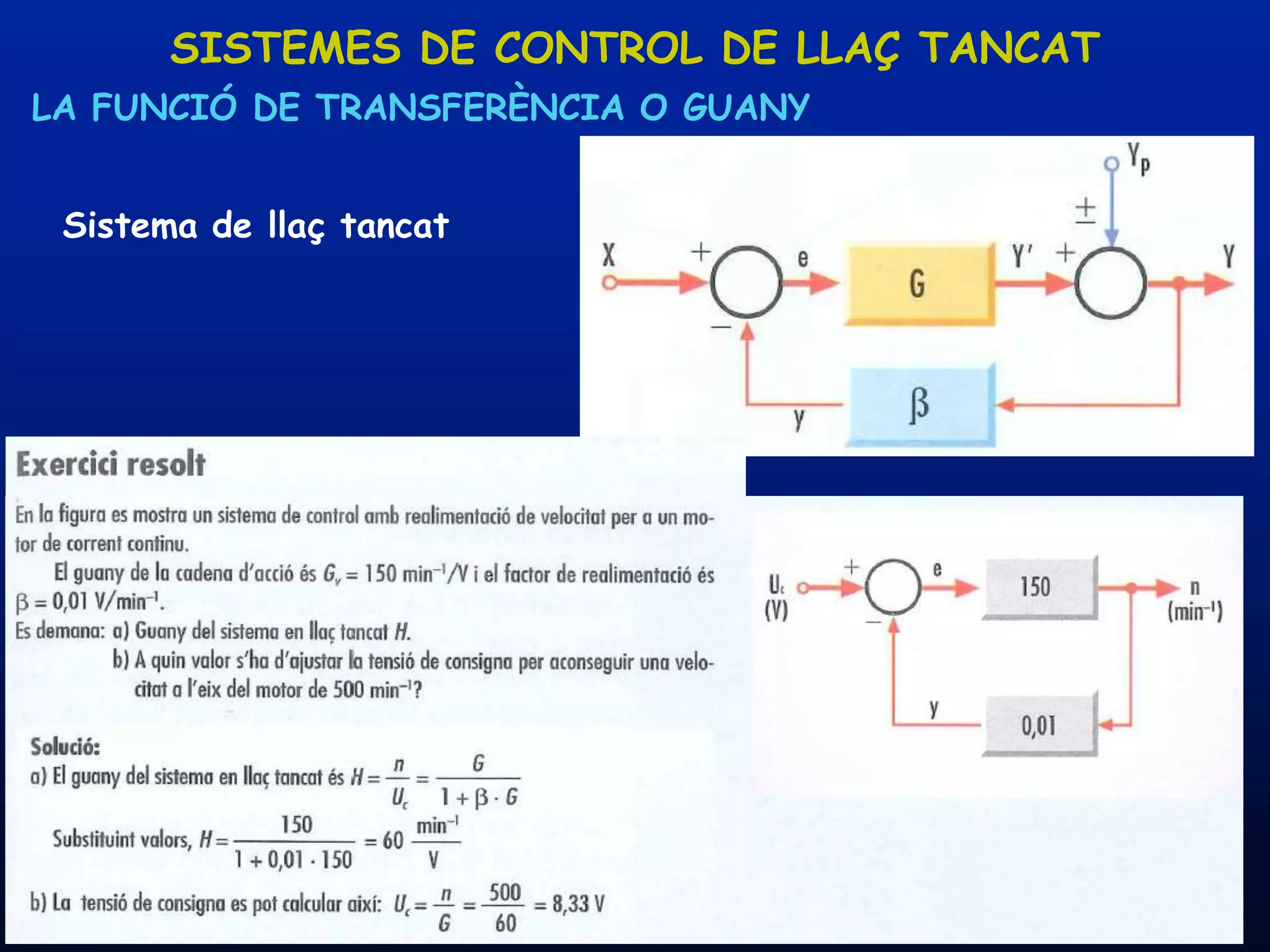
28.
SISTEMES DE CONTROLDE LLAÇ TANCAT
LA FUNCIÓ DE TRANSFERÈNCIA O GUANY
Sistema de llaç tancat
08/03/2012 Unitat 8. Sistemes automàtics i de control 28
29.
COMPONENTS DELS SISTEMESDE CONTROL
• En els sistemes de control és necessari utilitzar tot un conjunt de
components o dispositius tecnològics que permetin de fer la funció de
control necessària, independentment del tipus de tecnologia emprada
en aquests dispositius.
• Els principals dispositius que intervenen en un procés automàtic són:
Dispositiu d’entrada d’ordres: són els que permeten a l’operador
l’entrada de dades i ordres al sistema. Poden ser:
Elements binaris: permeten l’entrada d’ordres del tipus
activat/desactivat, cert/fals, si/no,...
polsadors, interruptors, commutadors,...
Elements numèrics/alfanumèrics: permeten l’entrada de
números i/o lletres teclats numèrics, preselectors digitals
(rodes numerades)
08/03/2012 Unitat 8. Sistemes automàtics i de control 29
30.
COMPONENTS DELS SISTEMESDE CONTROL
Dispositiu d’entrada d’ordres:
08/03/2012 Unitat 8. Sistemes automàtics i de control 30
31.
COMPONENTS DELS SISTEMESDE CONTROL
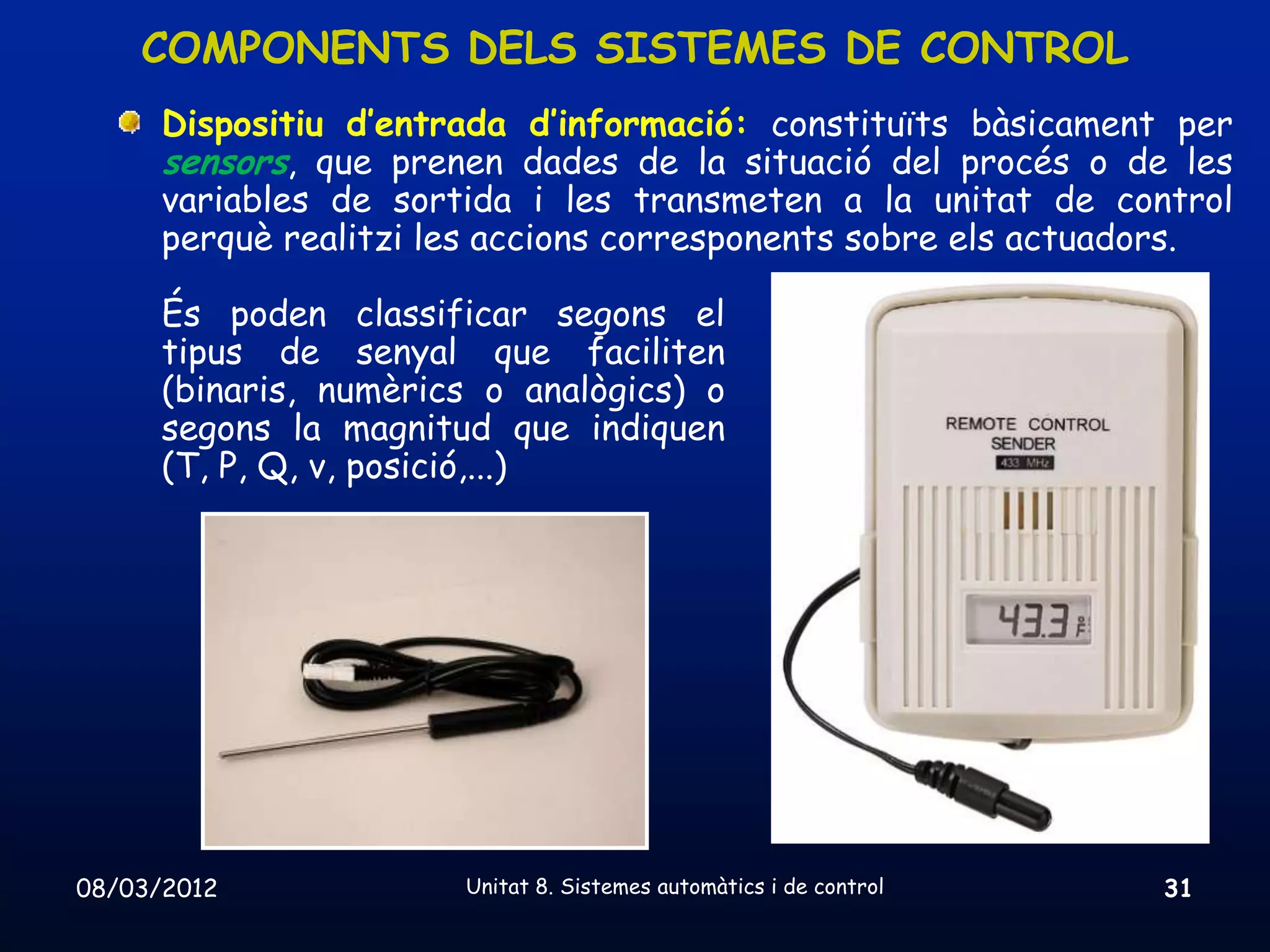
Dispositiu d’entrada d’informació: constituïts bàsicament per
sensors, que prenen dades de la situació del procés o de les
variables de sortida i les transmeten a la unitat de control
perquè realitzi les accions corresponents sobre els actuadors.
És poden classificar segons el
tipus de senyal que faciliten
(binaris, numèrics o analògics) o
segons la magnitud que indiquen
(T, P, Q, v, posició,...)
08/03/2012 Unitat 8. Sistemes automàtics i de control 31
32.
COMPONENTS DELS SISTEMESDE CONTROL
Dispositiu d’entrada d’informació:
08/03/2012 Unitat 8. Sistemes automàtics i de control 32
33.
COMPONENTS DELS SISTEMESDE CONTROL
Unitat de control o controlador: constitueix el sistema de
tractament de la informació del procés, i estableix la manera
com s’han de combinar les entrades d’informació per activar les
sortides del procés
Moltes vegades són necessàries les interfícies (convertidor
analògic/digital) que adapten els senyals dels sensors a les
entrades de la unitat de control.
Dispositius de sortida d’informació: s’encarreguen de la
comunicació amb l’operador. Poden classificar-se en:
• Binaris pilot visualitzador, timbres, sirenes,...
• Numèrics i alfanumèrics displays de 7
segments, pantalles de cristall
líquid, monitors, impressores,...)
08/03/2012 Unitat 8. Sistemes automàtics i de control 33
34.
COMPONENTS DELS SISTEMESDE CONTROL
Dispositius de sortida d’informació:
08/03/2012 Unitat 8. Sistemes automàtics i de control 34
35.
COMPONENTS DELS SISTEMESDE CONTROL
Actuadors i preactuadors: són els encarregats d’actuar sobre el
procés motors, cilindres pneumàtics, resistències
calefactores,...
Sovint els actuadors no són directament connectables al
controlador i requereixen preactuadors
contactors, relés, vàlvules distribuïdores, variadors de tensió,...
08/03/2012 Unitat 8. Sistemes automàtics i de control 35
COMPONENTS DELS SISTEMESDE CONTROL
ELEMENTS DEL CONTROL DE LLAÇ OBERT
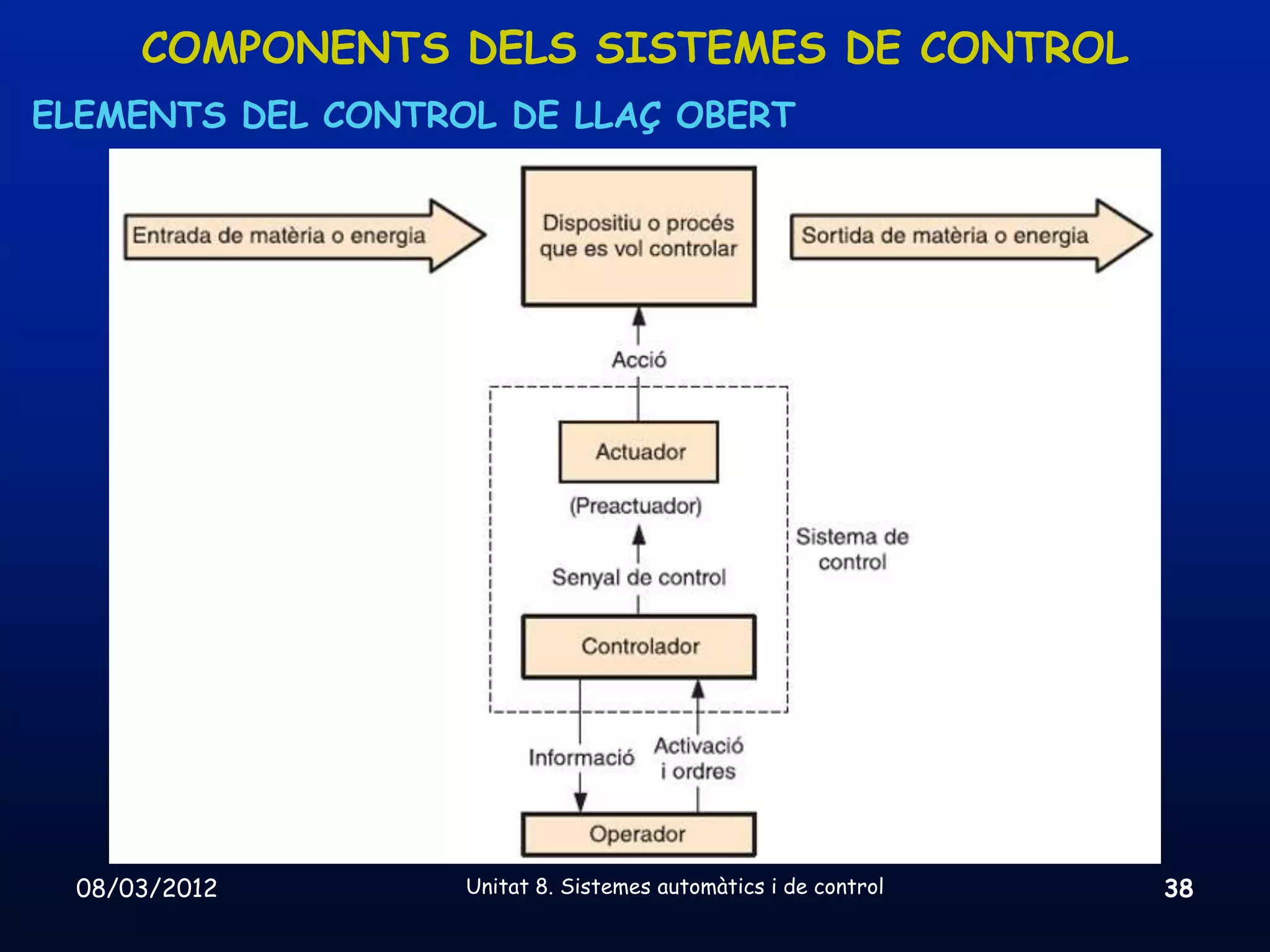
• El sistema de control de llaç obert està format, bàsicament, per dues
parts:
El controlador: és el dispositiu característic del sistema que
determina i executa el procés per al qual està preparat.
Ex: en el cas del llum de l’escala seria el temporitzador
en el cas d’una rentadora seria el programador
en el cas d’una torradora de pa seria el termòstat
L’actuador o accionador: és l’element final que fa una acció
sobre el procés.
Ex: en el cas del llum de l’escala seria la lampada
en el cas d’una rentadora seria el motor
en el cas d’una torradora de pa seria la resistència
08/03/2012 Unitat 8. Sistemes automàtics i de control 37
38.
COMPONENTS DELS SISTEMESDE CONTROL
ELEMENTS DEL CONTROL DE LLAÇ OBERT
08/03/2012 Unitat 8. Sistemes automàtics i de control 38
39.
COMPONENTS DELS SISTEMESDE CONTROL
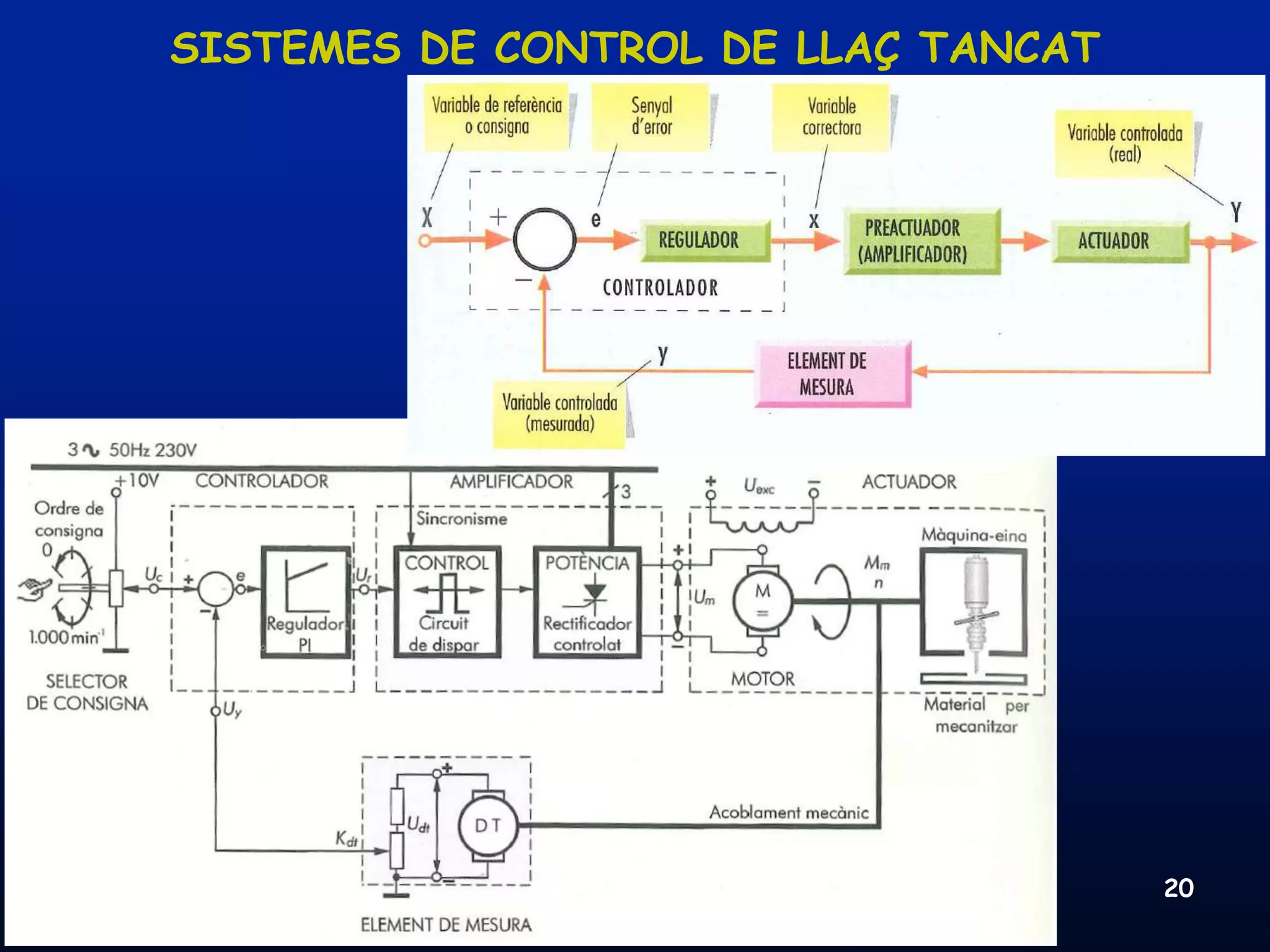
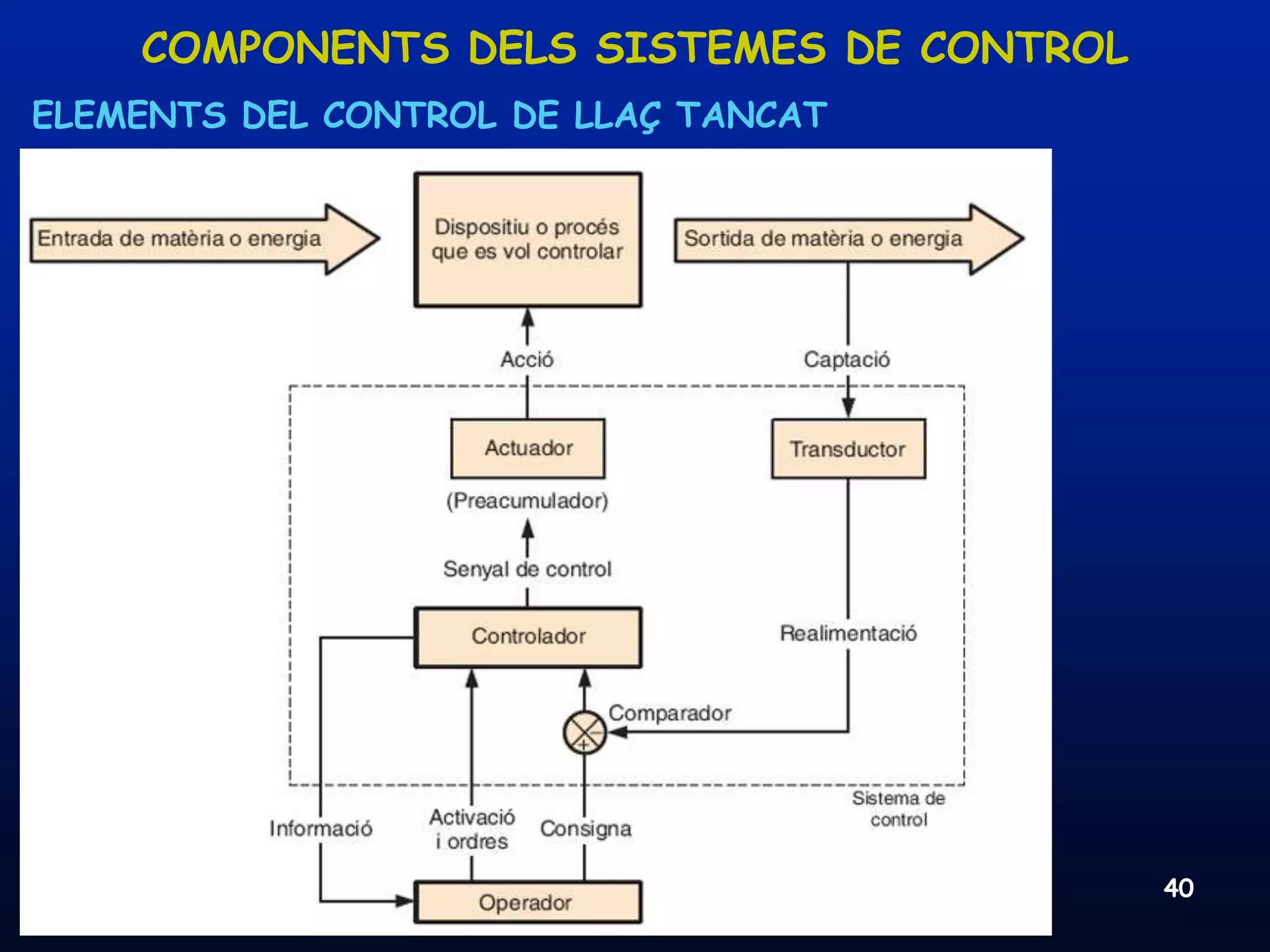
ELEMENTS DEL CONTROL DE LLAÇ TANCAT
• El sistema de control de llaç tancat té una composició més
complexa, hi intervenen més components.
• Per poder efectuar la realimentació necessitem disposar d’uns
elements de captació de les magnituds del procés, els sensors o
transductors, i d’uns circuits adaptadors anomenats interfícies.
Igualment també són necessaris uns actuadors o accionadors, que
actuen sobre el procés.
• A més, seran necessaris uns dispositius que s’encarreguin de
comparar i generar el senyal d’error quan entri en dissonància amb el
senyal de consigna. D’això se n’encarregaran el generador de valor
de consigna i el comparador.
08/03/2012 Unitat 8. Sistemes automàtics i de control 39
40.
COMPONENTS DELS SISTEMESDE CONTROL
ELEMENTS DEL CONTROL DE LLAÇ TANCAT
08/03/2012 Unitat 8. Sistemes automàtics i de control 40
41.
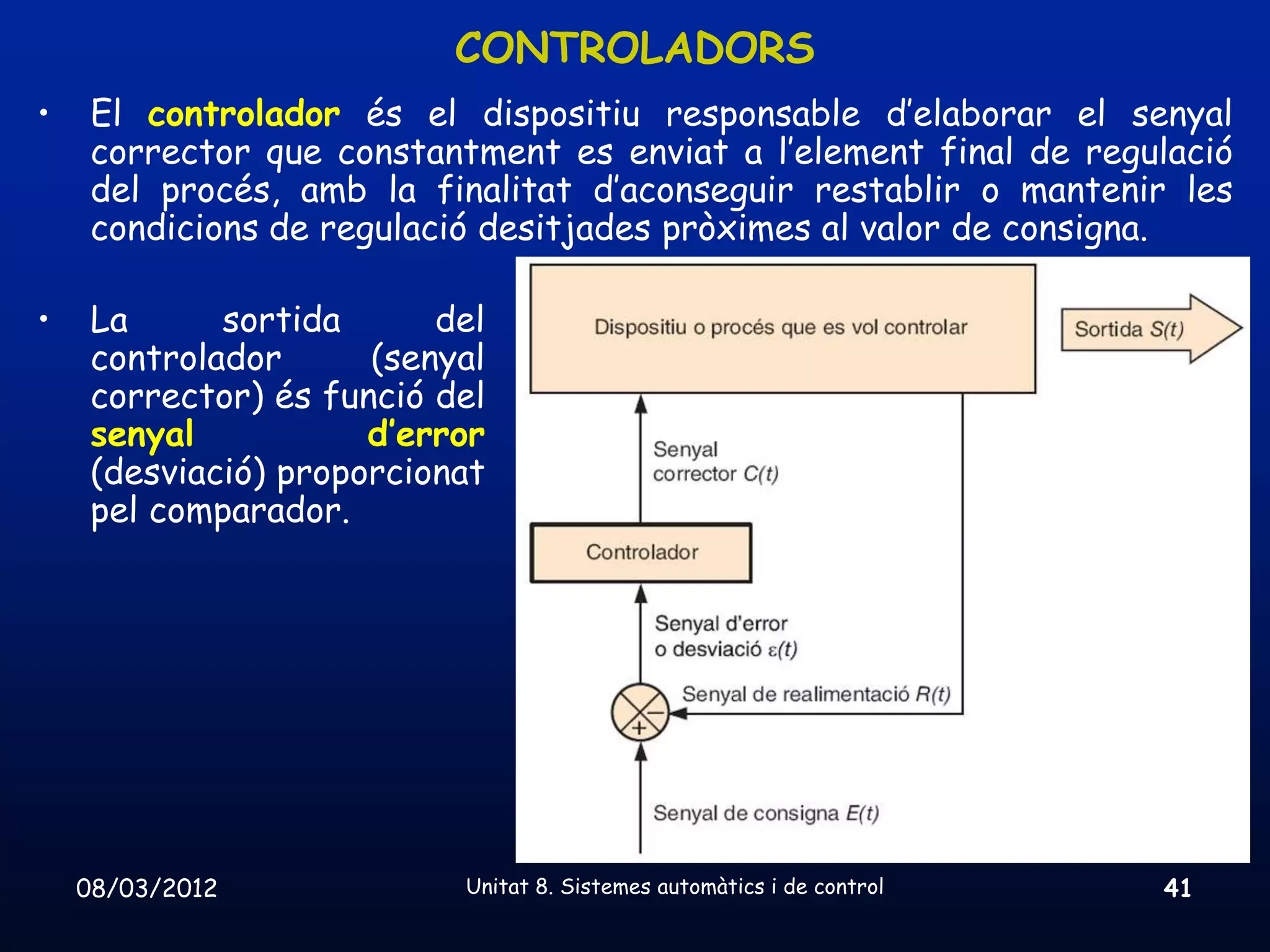
CONTROLADORS
• El controlador és el dispositiu responsable d’elaborar el senyal
corrector que constantment es enviat a l’element final de regulació
del procés, amb la finalitat d’aconseguir restablir o mantenir les
condicions de regulació desitjades pròximes al valor de consigna.
• La sortida del
controlador (senyal
corrector) és funció del
senyal d’error
(desviació) proporcionat
pel comparador.
08/03/2012 Unitat 8. Sistemes automàtics i de control 41
42.
CONTROLADORS
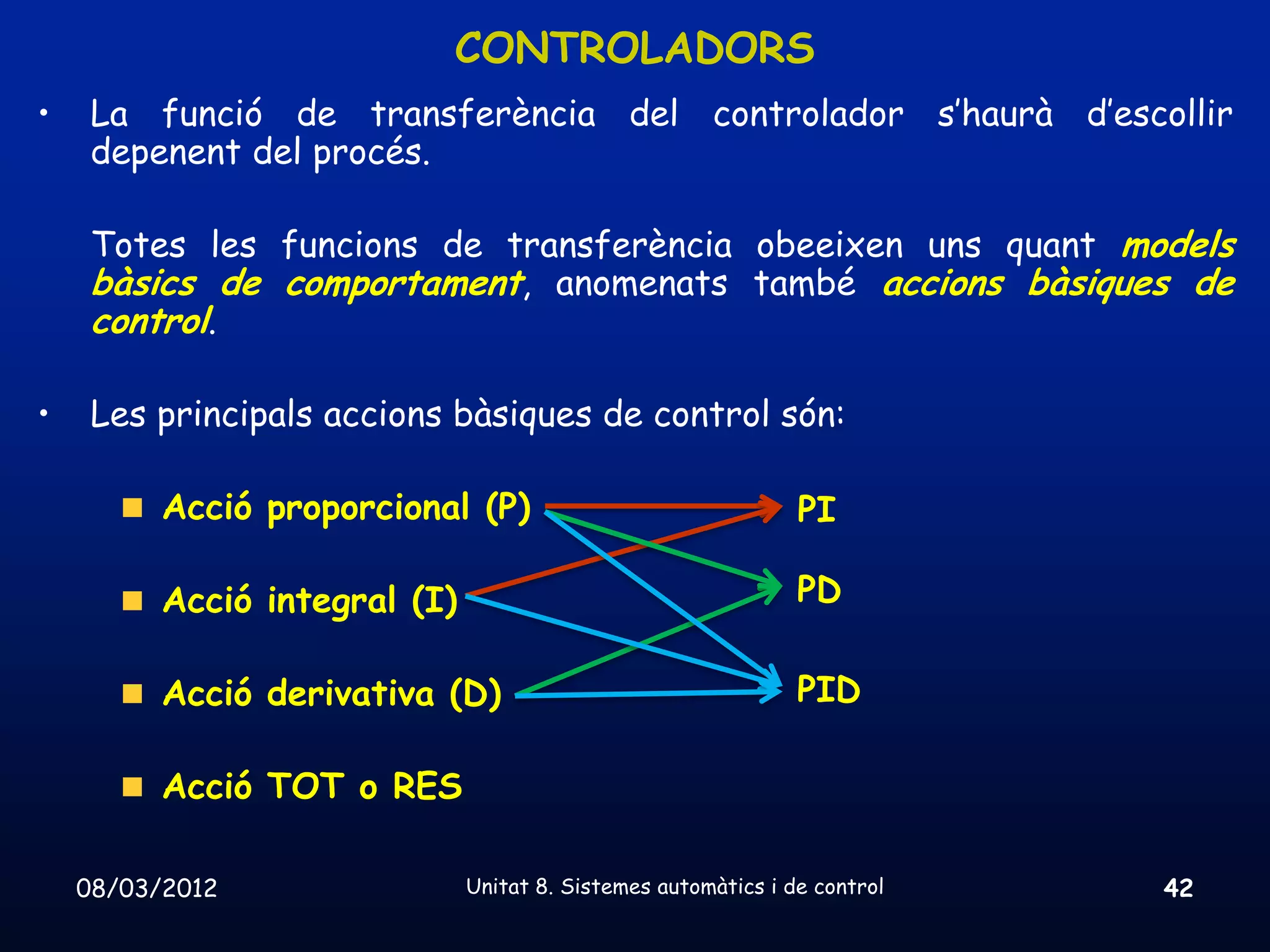
• La funció de transferència del controlador s’haurà d’escollir
depenent del procés.
Totes les funcions de transferència obeeixen uns quant models
bàsics de comportament, anomenats també accions bàsiques de
control.
• Les principals accions bàsiques de control són:
Acció proporcional (P) PI
Acció integral (I) PD
Acció derivativa (D) PID
Acció TOT o RES
08/03/2012 Unitat 8. Sistemes automàtics i de control 42
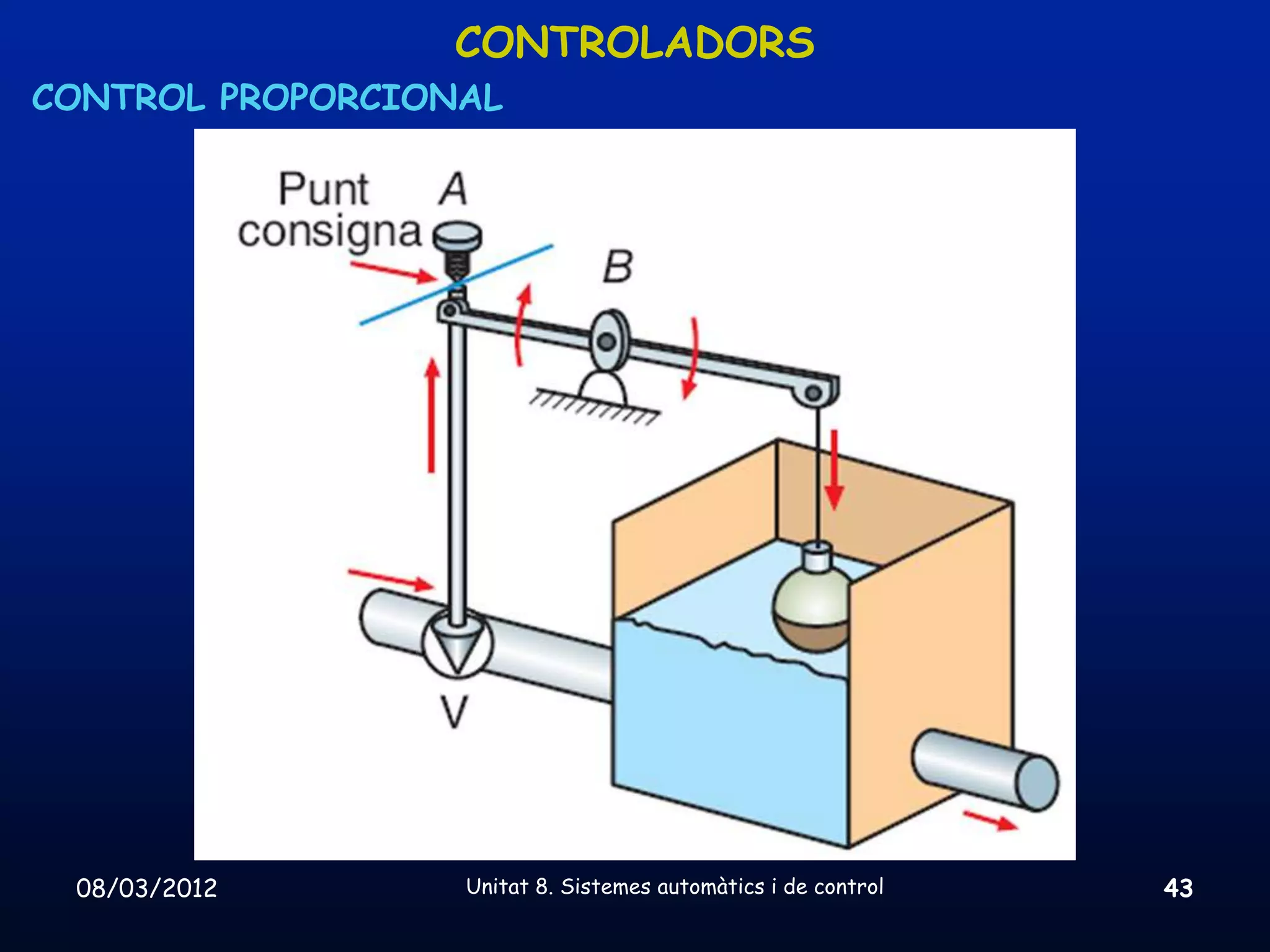
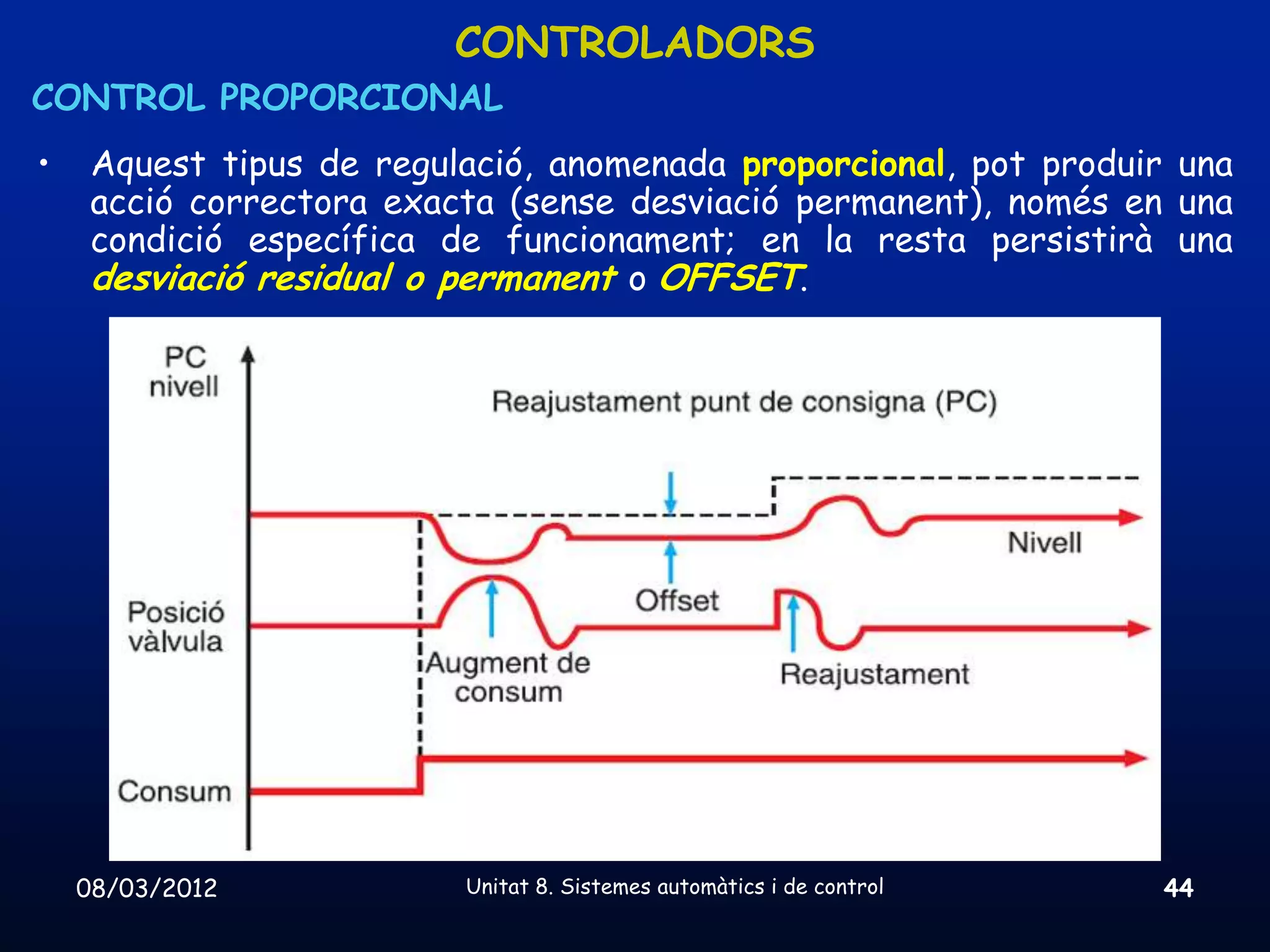
CONTROLADORS
CONTROL PROPORCIONAL
• Aquest tipus de regulació, anomenada proporcional, pot produir una
acció correctora exacta (sense desviació permanent), només en una
condició específica de funcionament; en la resta persistirà una
desviació residual o permanent o OFFSET.
08/03/2012 Unitat 8. Sistemes automàtics i de control 44
45.
CONTROLADORS
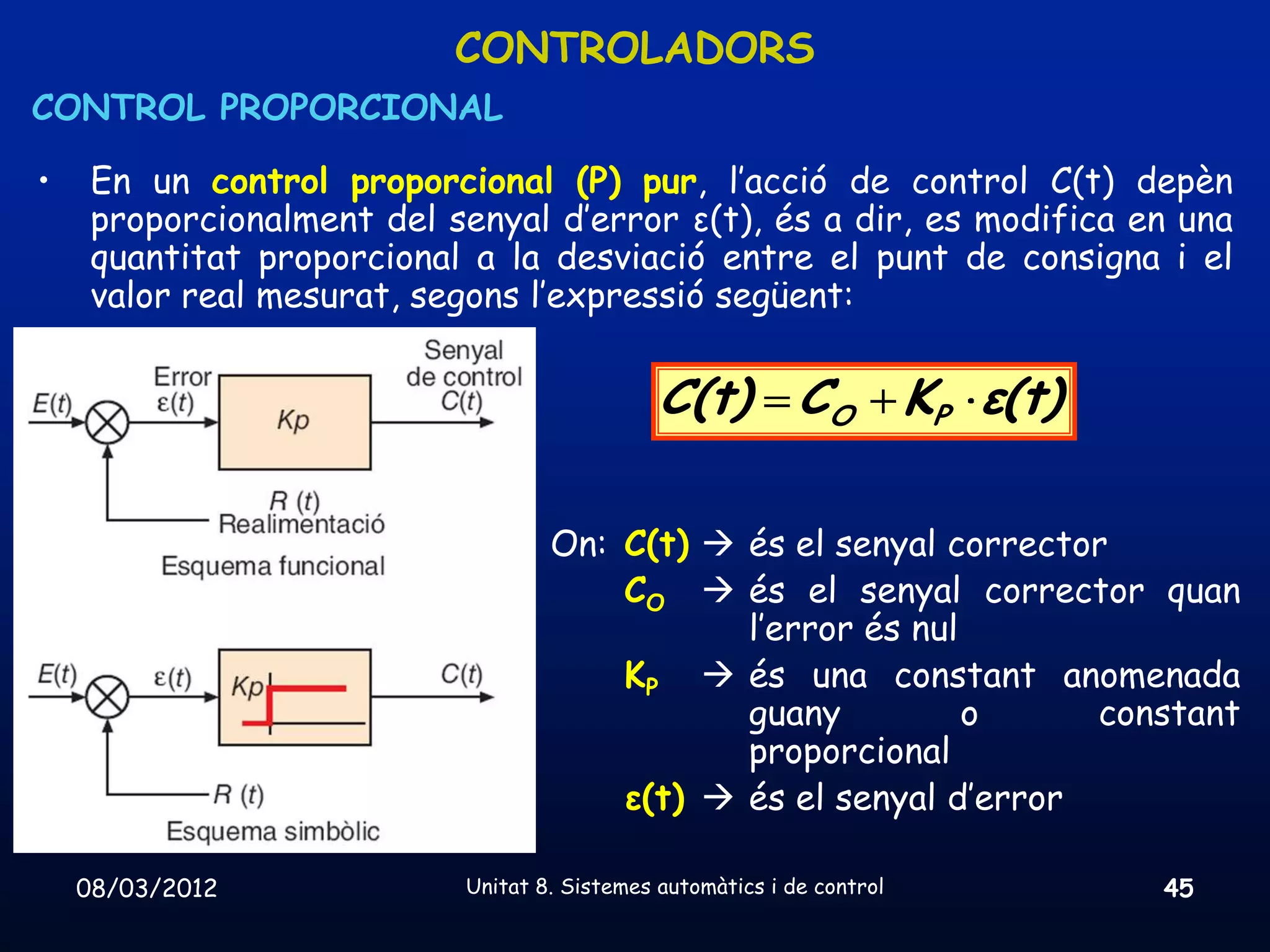
CONTROL PROPORCIONAL
• En un control proporcional (P) pur, l’acció de control C(t) depèn
proporcionalment del senyal d’error ε(t), és a dir, es modifica en una
quantitat proporcional a la desviació entre el punt de consigna i el
valor real mesurat, segons l’expressió següent:
C(t) CO KP ε(t)
On: C(t) és el senyal corrector
CO és el senyal corrector quan
l’error és nul
KP és una constant anomenada
guany o constant
proporcional
ε(t) és el senyal d’error
08/03/2012 Unitat 8. Sistemes automàtics i de control 45
46.
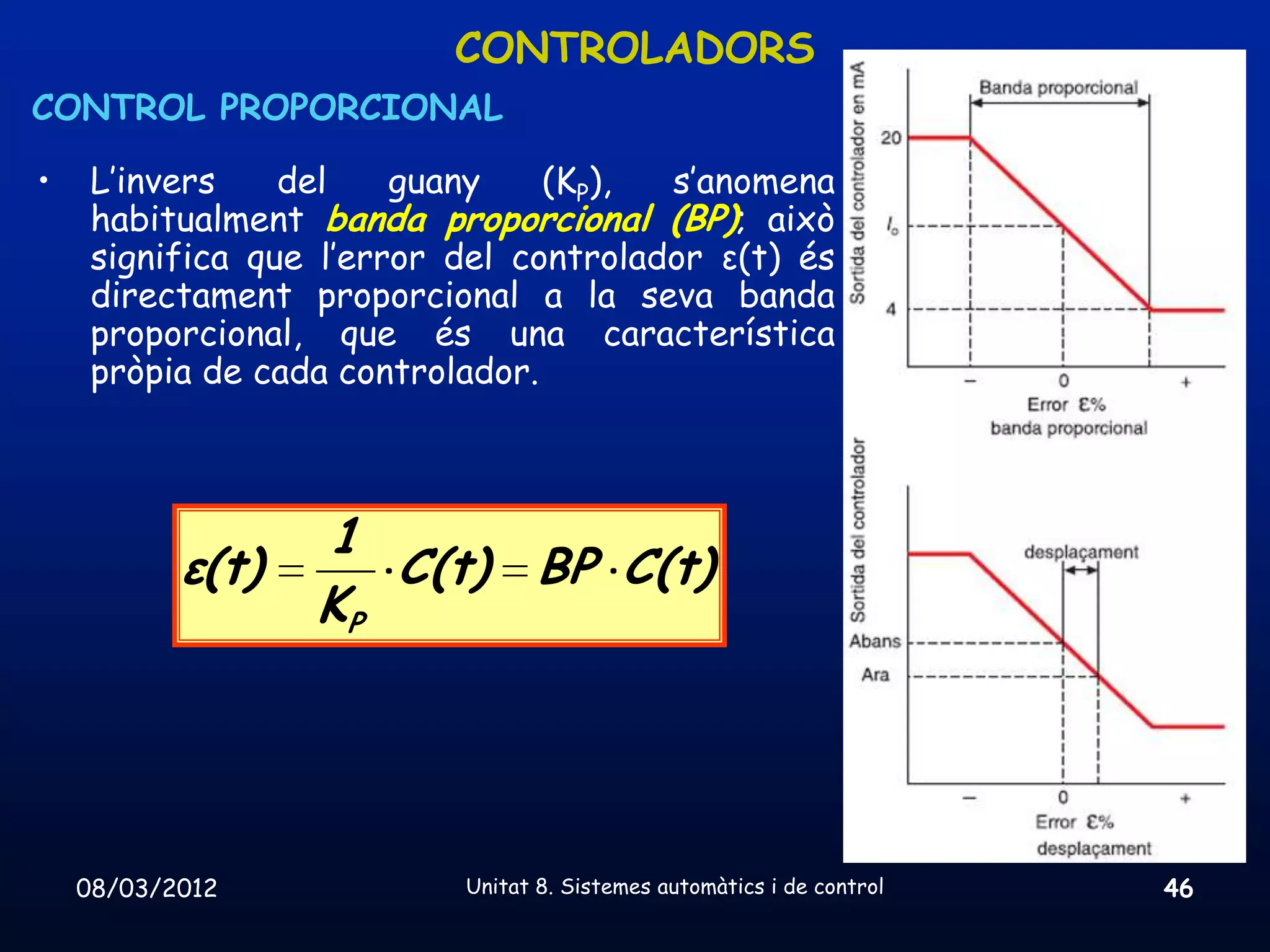
CONTROLADORS
CONTROL PROPORCIONAL
• L’invers del guany (KP), s’anomena
habitualment banda proporcional (BP); això
significa que l’error del controlador ε(t) és
directament proporcional a la seva banda
proporcional, que és una característica
pròpia de cada controlador.
1
ε(t) C(t) BP C(t)
KP
08/03/2012 Unitat 8. Sistemes automàtics i de control 46
CONTROLADORS
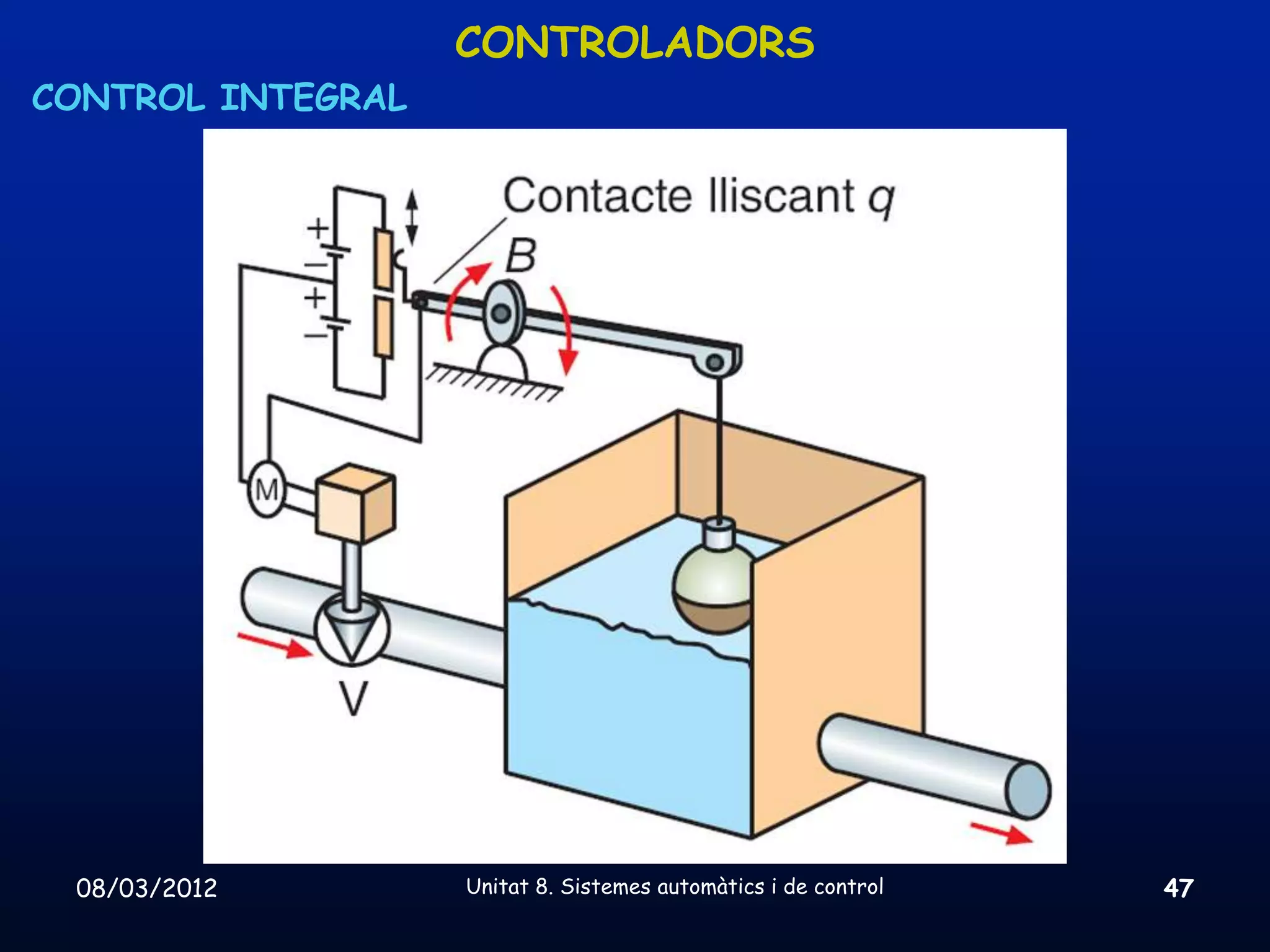
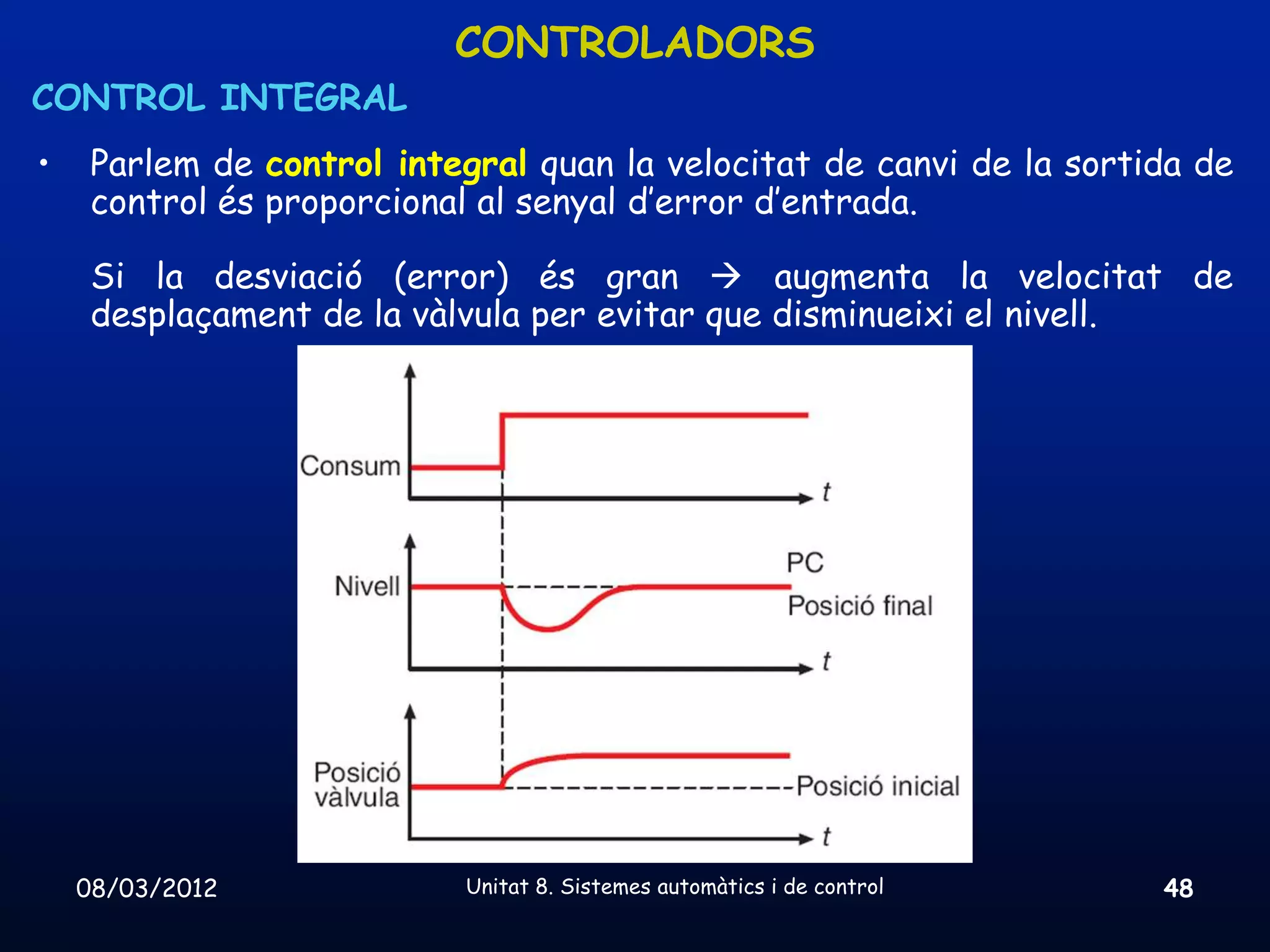
CONTROL INTEGRAL
• Parlem de control integral quan la velocitat de canvi de la sortida de
control és proporcional al senyal d’error d’entrada.
Si la desviació (error) és gran augmenta la velocitat de
desplaçament de la vàlvula per evitar que disminueixi el nivell.
08/03/2012 Unitat 8. Sistemes automàtics i de control 48
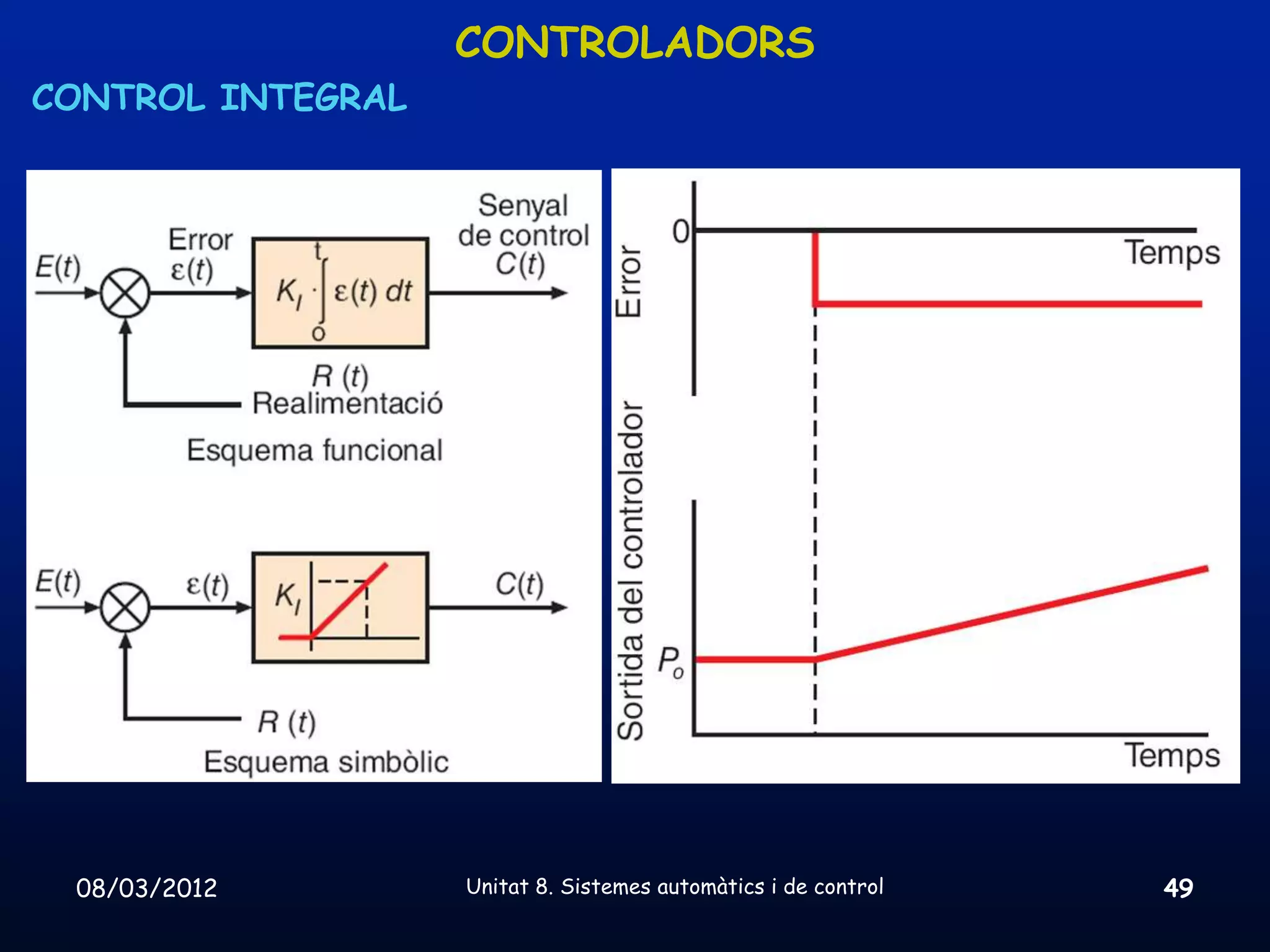
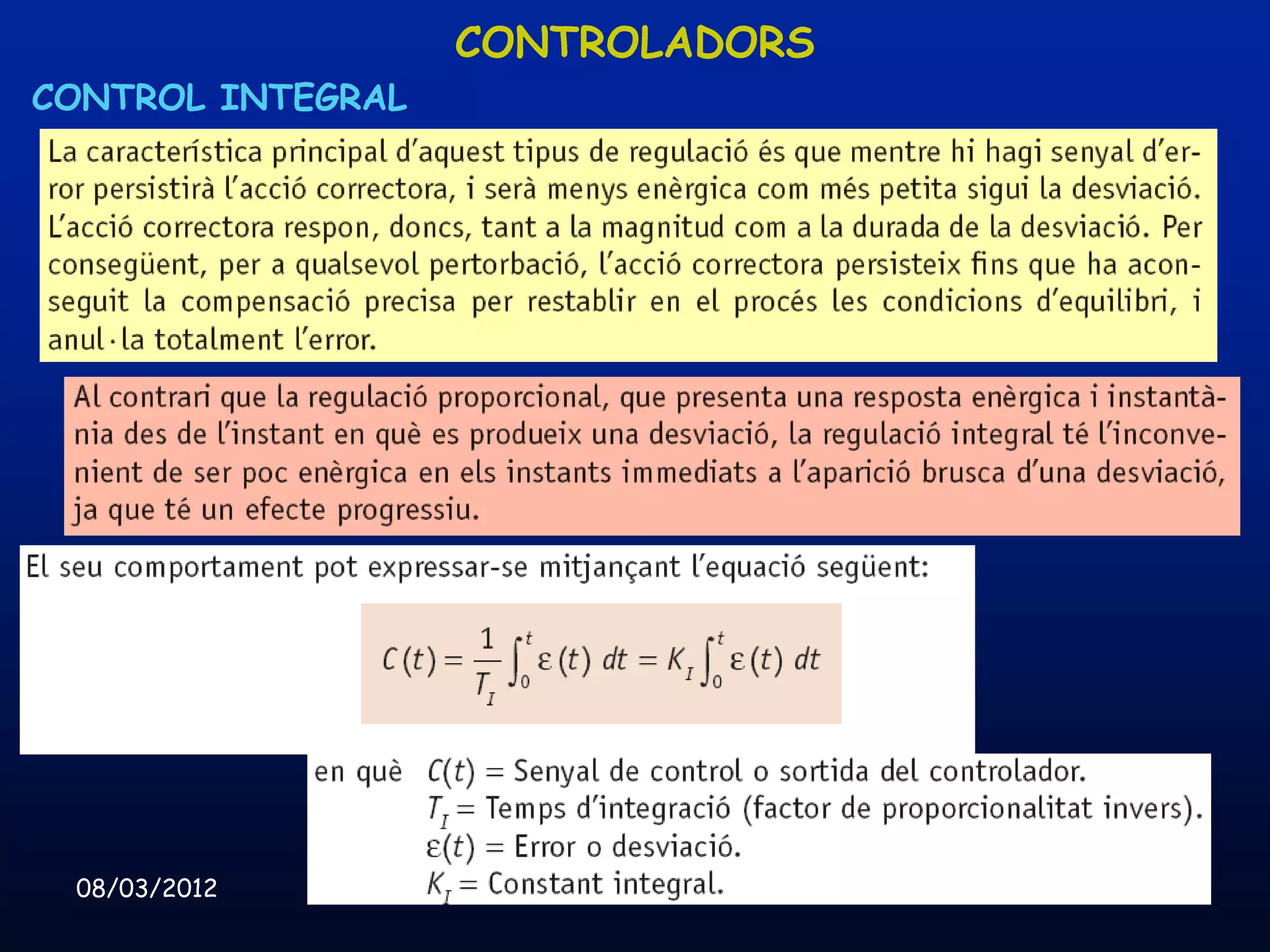
CONTROLADORS
CONTROL DERIVATIU
• L’acció proporcional reacciona ràpida i enèrgicament, però deixa un
error permanent. L’acció integral pot provocar inestabilitat en el
sistema o una resposta excessivament lenta si es vol corregir la
inestabilitat.
L’objectiu de l’acció derivativa (D) és precisament complementar les
dues anteriors i permetre d’obtenir una resposta dinàmica més
ràpida, és a dir, aconseguir un temps de resposta menor.
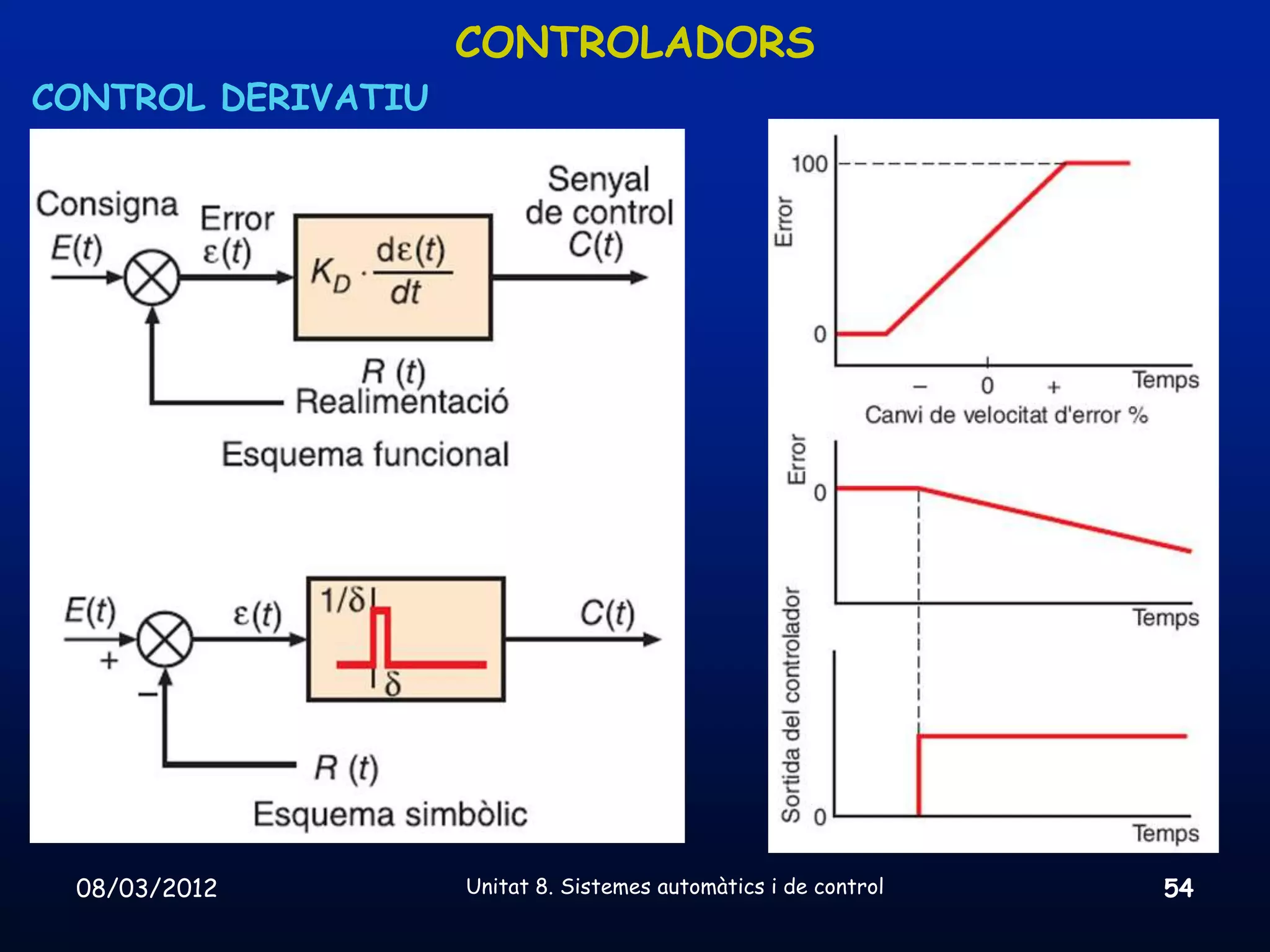
• El control derivatiu es caracteritza per generar un senyal de control
proporcional a la velocitat amb què varia la magnitud d’error amb el
temps. Dit d’una altra manera, l’acció derivativa s’oposa a les
desviacions amb una acció que és proporcional a la rapidesa
d’aquestes.
Si es produeix un error molt brusc augmenta molt la velocitat de
variació aquest comportament no es desitjable, i per tant a la
pràctica no s’usa el control derivatiu de forma pura, sinó associada a
una acció P o a una acció PI.
08/03/2012 Unitat 8. Sistemes automàtics i de control 51
CONTROLADORS
CONTROL PROPORCIONAL-INTEGRAL-DERIVATIU (PID)
• L’objectiu d’aquest tipus de control és obtenir tots els avantatges
dels altres tres i superar els seus inconvenients.
• Recordem les característiques i el comportament de cadascuna de les
tres accions (referides al dipòsit d’aigua):
L’acció proporcional corregeix la posició de la vàlvula en una
quantia proporcional a la desviació. És d’efecte instantani i
enèrgic, encara que presenta una desviació permanent.
L’acció integral mou la vàlvula a una velocitat proporcional a la
desviació o senyal d’error. És d’efecte lent i progressiu, però
continua actuant fins a anul·lar la desviació permanent.
L’acció derivativa corregeix la posició de la vàlvula en un valor
proporcional a la velocitat de canvi de la desviació. Això produeix
un efecte d’anticipació si tenim en compte la tendència de la
variable controlada.
08/03/2012 Unitat 8. Sistemes automàtics i de control 55
56.
CONTROLADORS
CONTROL PROPORCIONAL-INTEGRAL-DERIVATIU (PID)
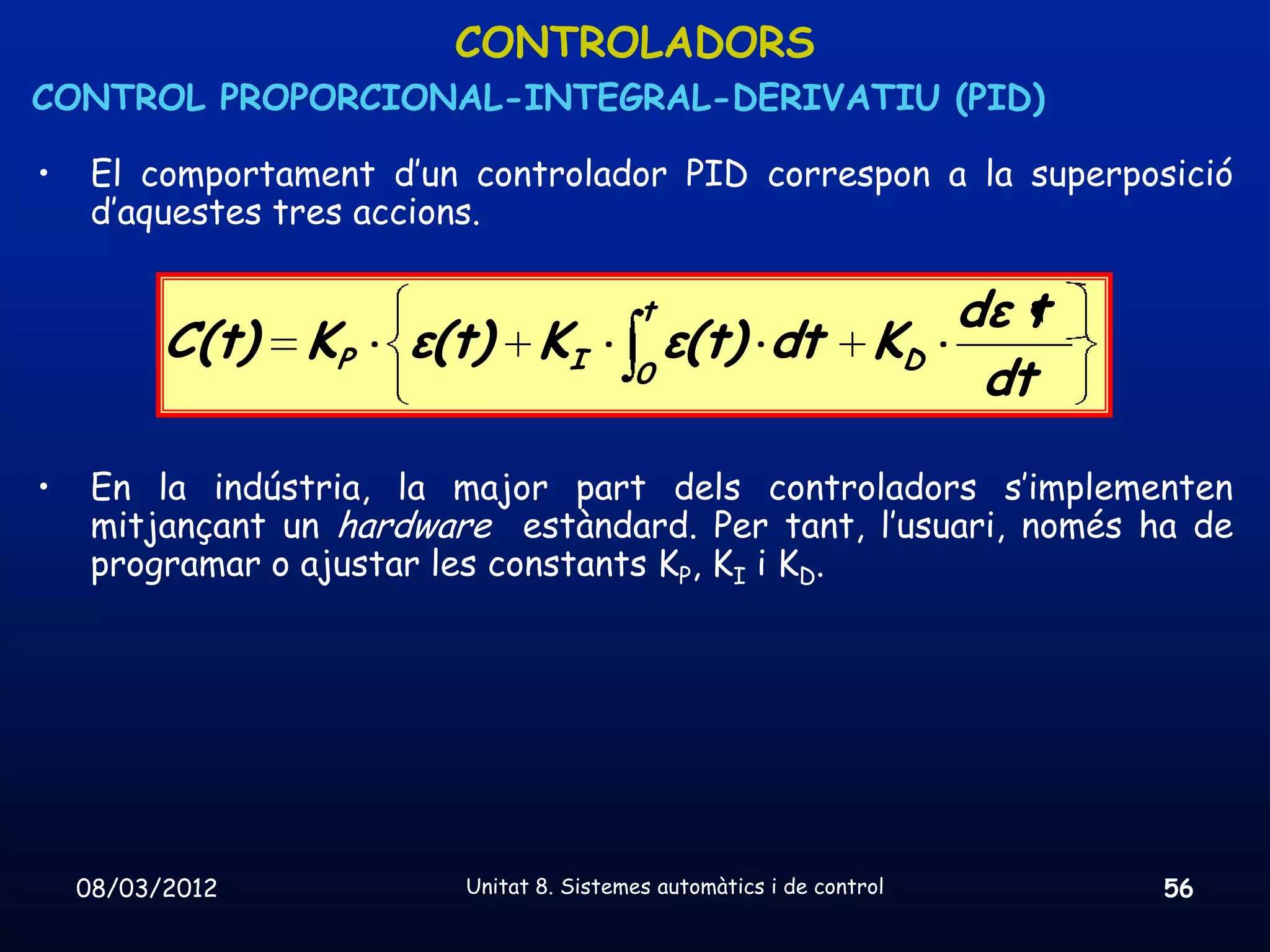
• El comportament d’un controlador PID correspon a la superposició
d’aquestes tres accions.
t dε t
C(t) KP ε(t) KI ε(t) dt KD
0 dt
• En la indústria, la major part dels controladors s’implementen
mitjançant un hardware estàndard. Per tant, l’usuari, només ha de
programar o ajustar les constants KP, KI i KD.
08/03/2012 Unitat 8. Sistemes automàtics i de control 56
57.
CONTROLADORS
CONTROL TOT ORES
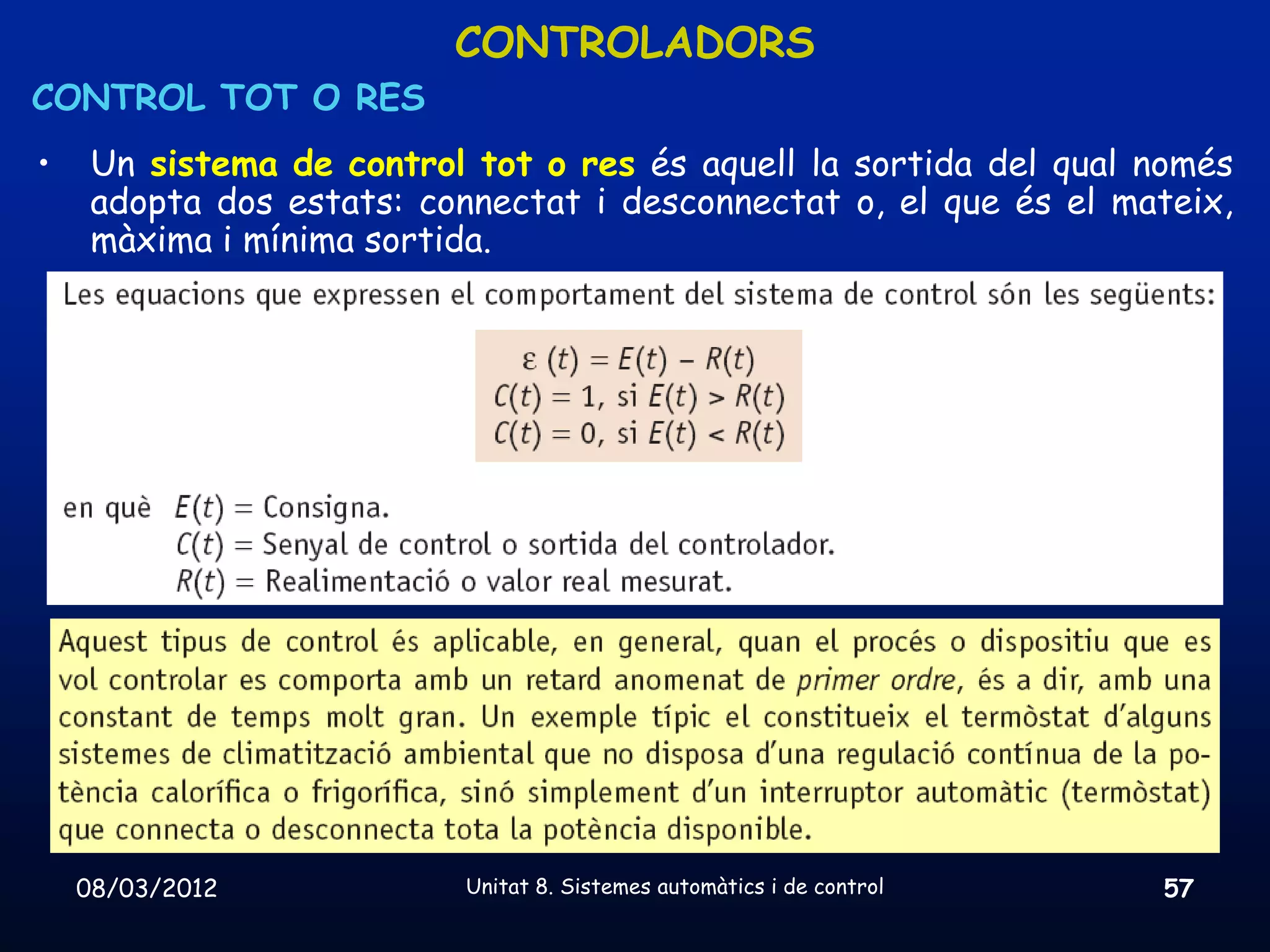
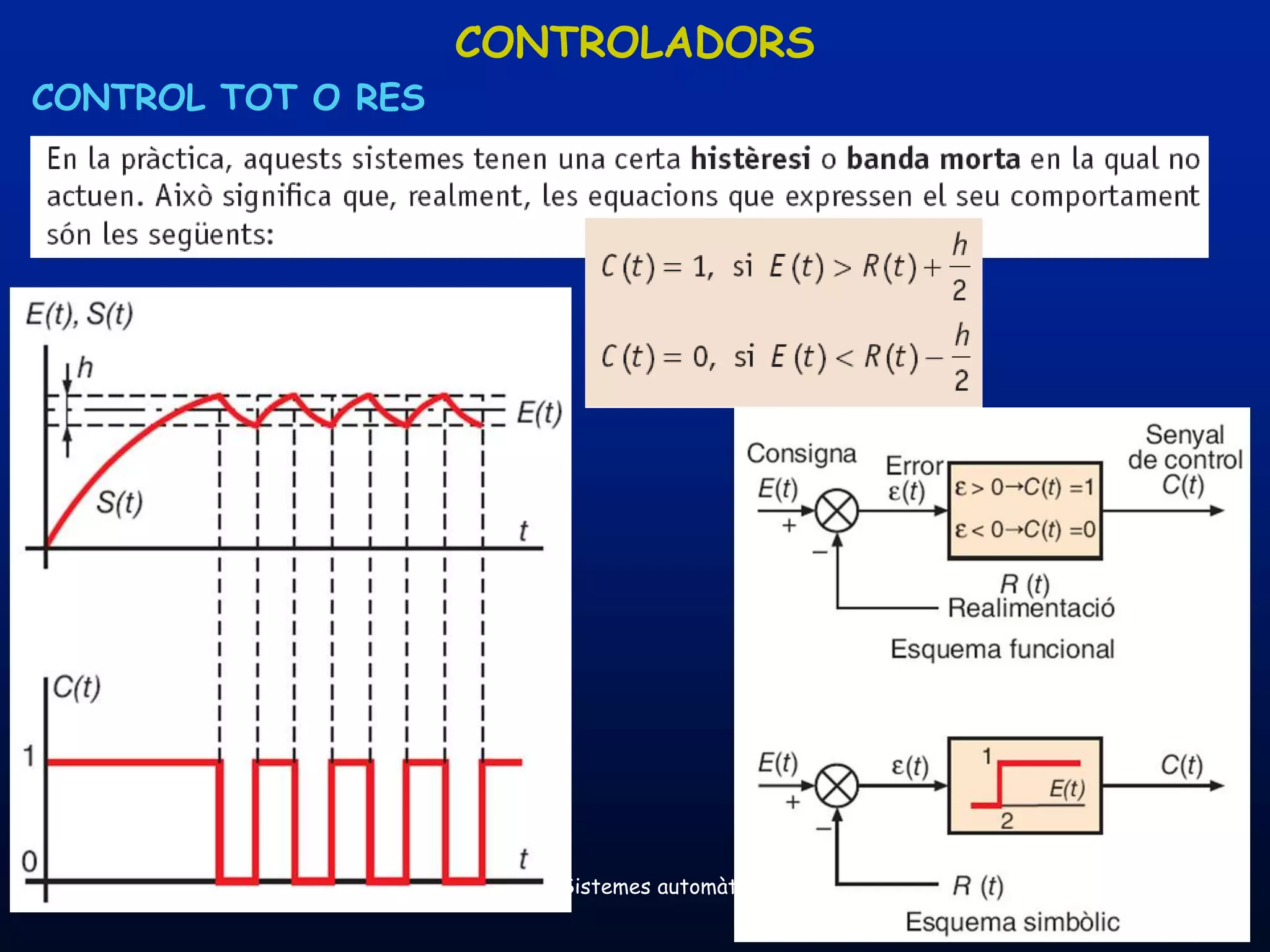
• Un sistema de control tot o res és aquell la sortida del qual només
adopta dos estats: connectat i desconnectat o, el que és el mateix,
màxima i mínima sortida.
08/03/2012 Unitat 8. Sistemes automàtics i de control 57
TRANSDUCTORS
• Els transductors o sensors són dispositius que transformen una
magnitud física en una altra magnitud física, sovint un senyal
elèctric, entre les quals hi ha una relació determinada.
ESTRUCTURA D’UN TRANSDUCTOR
• En un transductor podem distingir les parts següents:
Element sensor o captador: converteix les variacions d’una
magnitud física en variacions d’una magnitud elèctrica o
magnètica, anomenada comunament senyal.
Bloc de tractament de senyal: té com a funció
filtrar, preamplificar,... i, en general, tractar el senyal obtingut
pel captador per acoblar-lo a l’entrada de l’etapa de sortida.
Etapa de sortida: comprèn els amplificadors, relés, convertidors
de codi, transmissors i, en general, tots aquells circuits que
adapten el senyal a les necessitats de la càrrega exterior.
08/03/2012 Unitat 8. Sistemes automàtics i de control 59
60.
TRANSDUCTORS
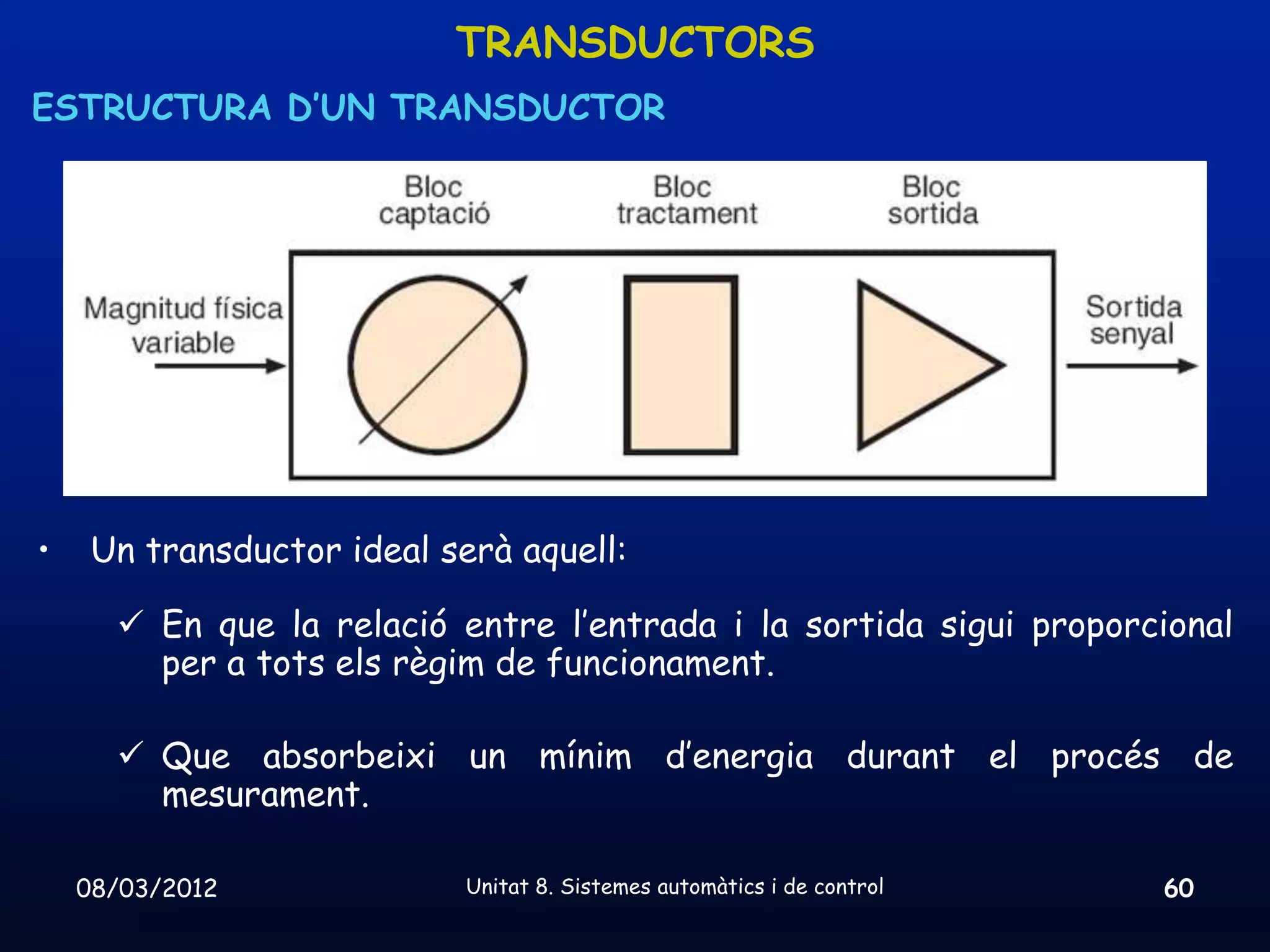
ESTRUCTURA D’UN TRANSDUCTOR
• Un transductor ideal serà aquell:
En que la relació entre l’entrada i la sortida sigui proporcional
per a tots els règim de funcionament.
Que absorbeixi un mínim d’energia durant el procés de
mesurament.
08/03/2012 Unitat 8. Sistemes automàtics i de control 60
61.
TRANSDUCTORS
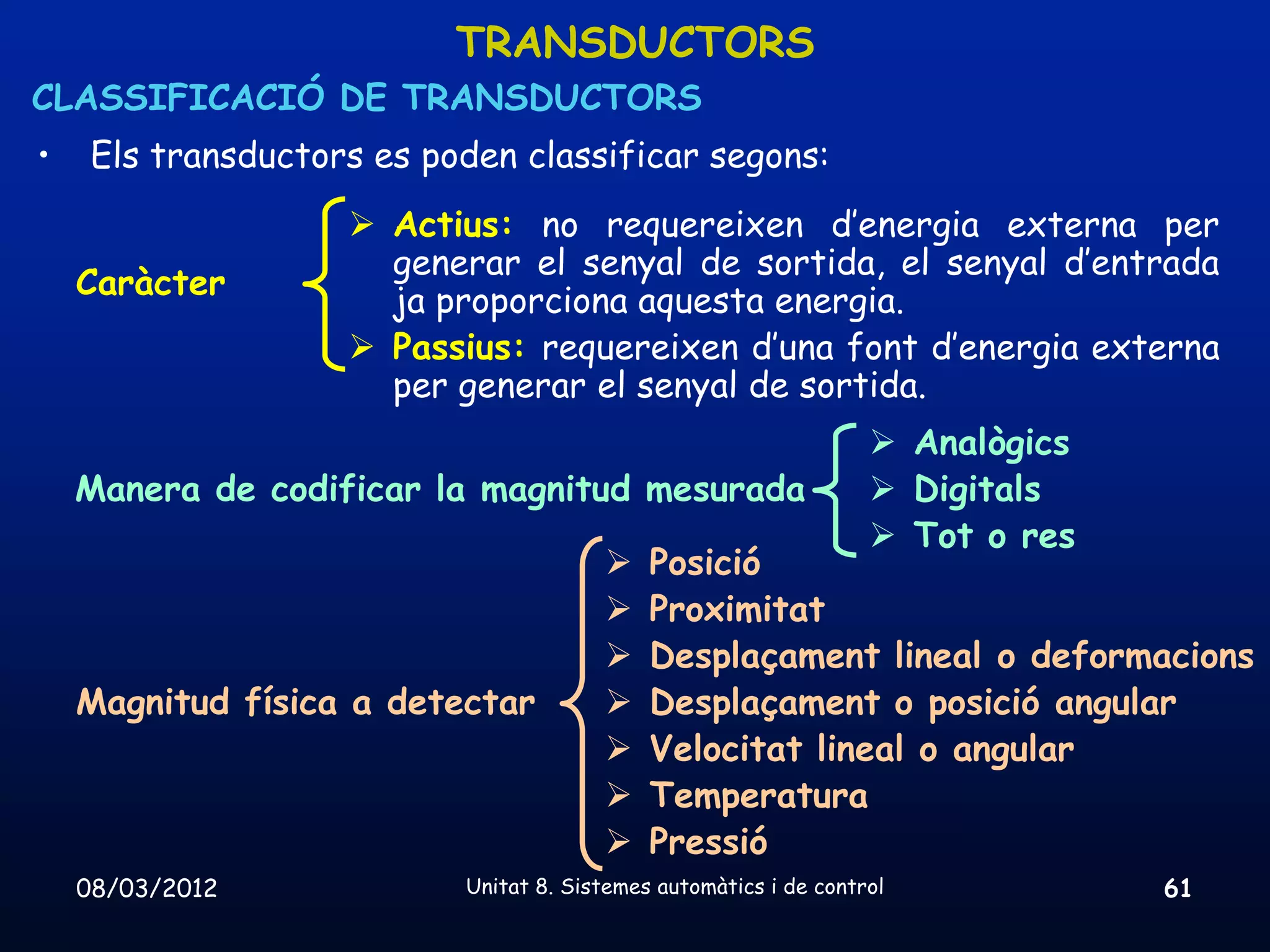
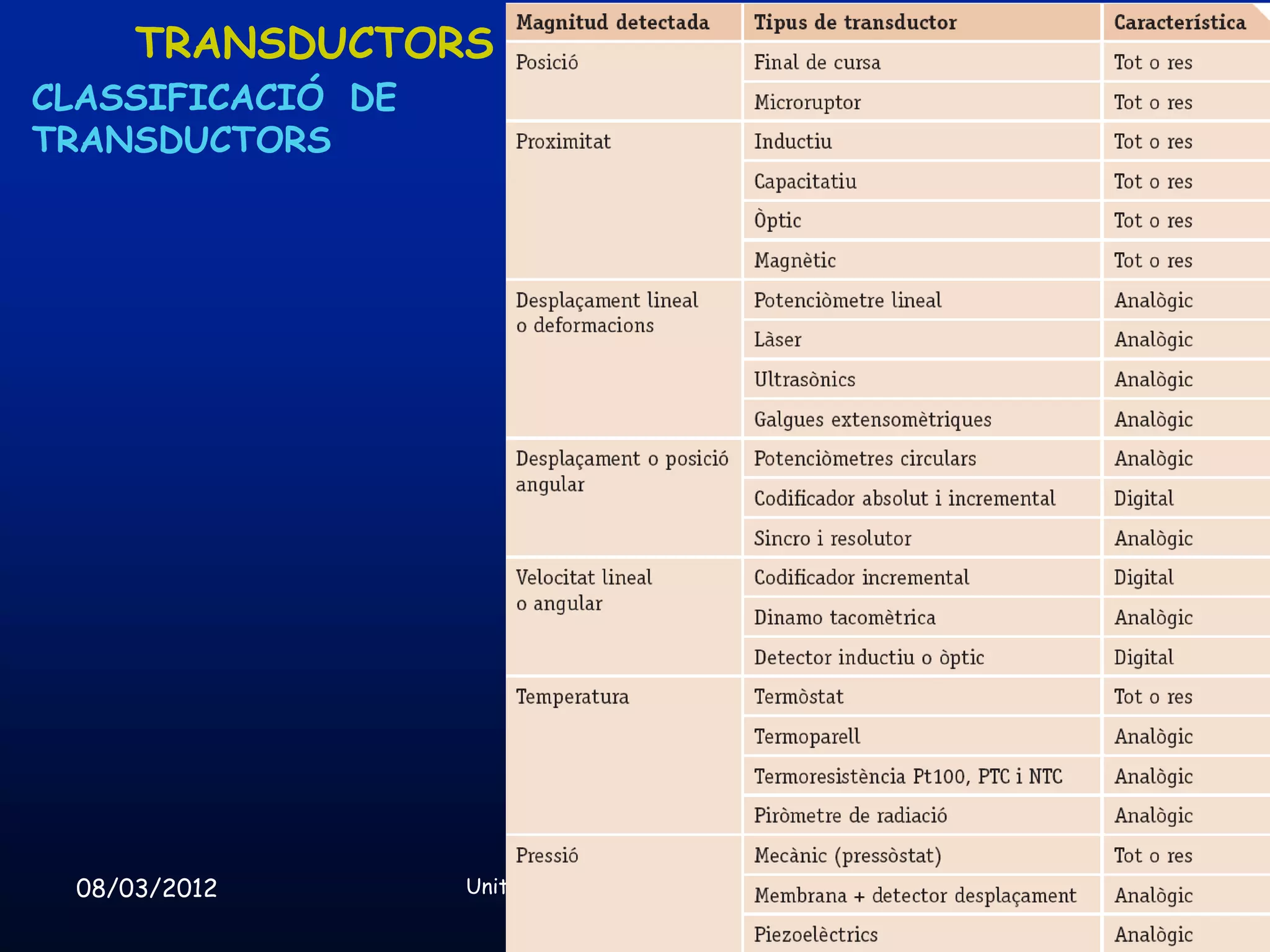
CLASSIFICACIÓ DE TRANSDUCTORS
• Els transductors es poden classificar segons:
Actius: no requereixen d’energia externa per
generar el senyal de sortida, el senyal d’entrada
Caràcter
ja proporciona aquesta energia.
Passius: requereixen d’una font d’energia externa
per generar el senyal de sortida.
Analògics
Manera de codificar la magnitud mesurada Digitals
Tot o res
Posició
Proximitat
Desplaçament lineal o deformacions
Magnitud física a detectar Desplaçament o posició angular
Velocitat lineal o angular
Temperatura
Pressió
08/03/2012 Unitat 8. Sistemes automàtics i de control 61
TRANSDUCTORS CLASSIFICACIÓ DE TRANSDUCTORS
TRANSDUCTORS DE POSICIÓ
• Detecten la presència o posició d’un objecte en un punt concret.
Poden ser:
Finals de cursa: activen i desactiven els seus contactes
mitjançant l’acció mecànica sobre l’actuador que porten
incorporat (polsador, palanca, rodet, vareta elàstica,...)
Microruptors: actuen com els finals de cursa però són
constructivament diferents: actuen amb menor força
d’accionament, són més petits, treballen amb menys
corrent,...
08/03/2012 Unitat 8. Sistemes automàtics i de control 63
64.
TRANSDUCTORS CLASSIFICACIÓ DE TRANSDUCTORS
TRANSDUCTORS DE POSICIÓ
08/03/2012 Unitat 8. Sistemes automàtics i de control 64
65.
TRANSDUCTORS CLASSIFICACIÓ DE TRANSDUCTORS
TRANSDUCTORS DE PROXIMITAT
• Fan la mateixa funció que els transductors de posició, és a dir
detecten la proximitat o presència d’un objecte i
donen, normalment, una resposta tot o res (també pot ser analògica).
Els principals avantatges respecte els transductors de posició:
• No cal que existeixi contacte físic o esforç mecànic. Per aquest
motiu tenen un menor desgast una major vida útil.
• Major resistència a ambients agressius.
• Possibilitat de poder realitzar major freqüència d’operacions.
08/03/2012 Unitat 8. Sistemes automàtics i de control 65
66.
TRANSDUCTORS CLASSIFICACIÓ DE TRANSDUCTORS
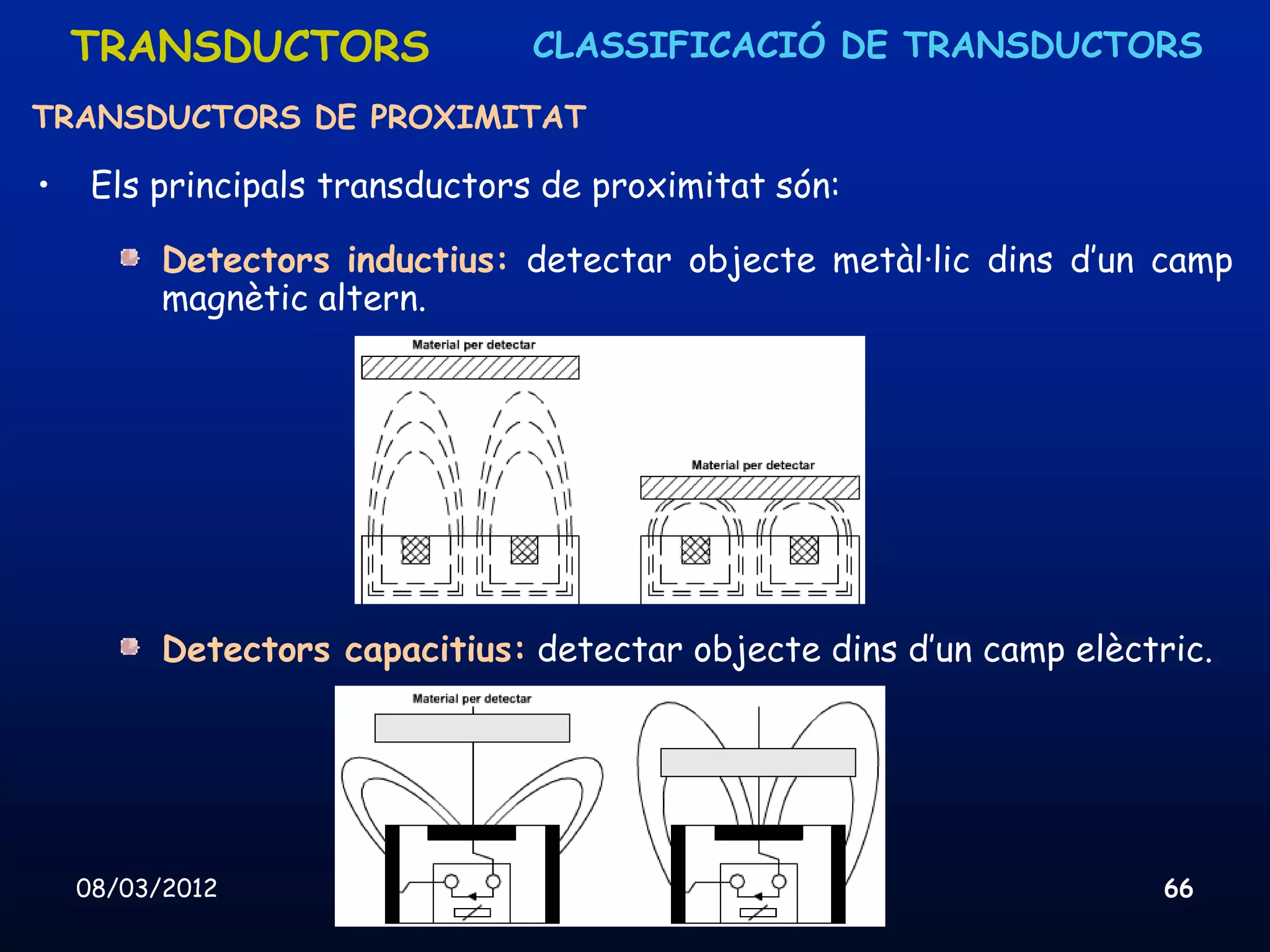
TRANSDUCTORS DE PROXIMITAT
• Els principals transductors de proximitat són:
Detectors inductius: detectar objecte metàl·lic dins d’un camp
magnètic altern.
Detectors capacitius: detectar objecte dins d’un camp elèctric.
08/03/2012 Unitat 8. Sistemes automàtics i de control 66
67.
TRANSDUCTORS CLASSIFICACIÓ DE TRANSDUCTORS
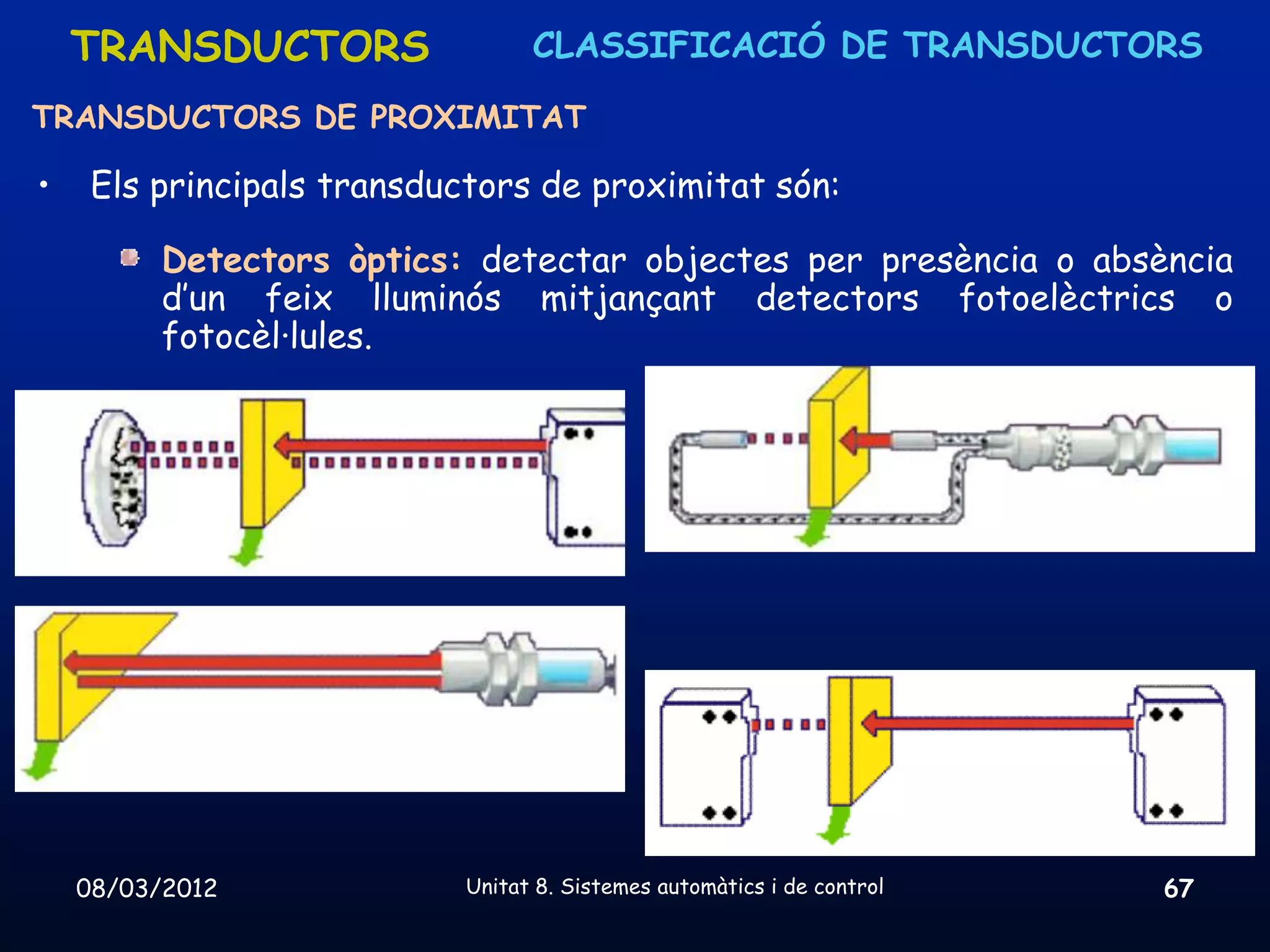
TRANSDUCTORS DE PROXIMITAT
• Els principals transductors de proximitat són:
Detectors òptics: detectar objectes per presència o absència
d’un feix lluminós mitjançant detectors fotoelèctrics o
fotocèl·lules.
08/03/2012 Unitat 8. Sistemes automàtics i de control 67
68.
TRANSDUCTORS CLASSIFICACIÓ DE TRANSDUCTORS
TRANSDUCTORS DE PROXIMITAT
• Els principals transductors de proximitat són:
Detectors magnètics: efecte d’un camp magnètic permanent
sobre un parell de llengüetes enfrontades i introduïdes en un
petit tub de vidre amb un determinat gas (contactes Reed).
Detectors pneumàtics
Detectors ultrasònics
08/03/2012 Unitat 8. Sistemes automàtics i de control 68
69.
TRANSDUCTORS CLASSIFICACIÓ DE TRANSDUCTORS
TRANSDUCTORS DE PROXIMITAT
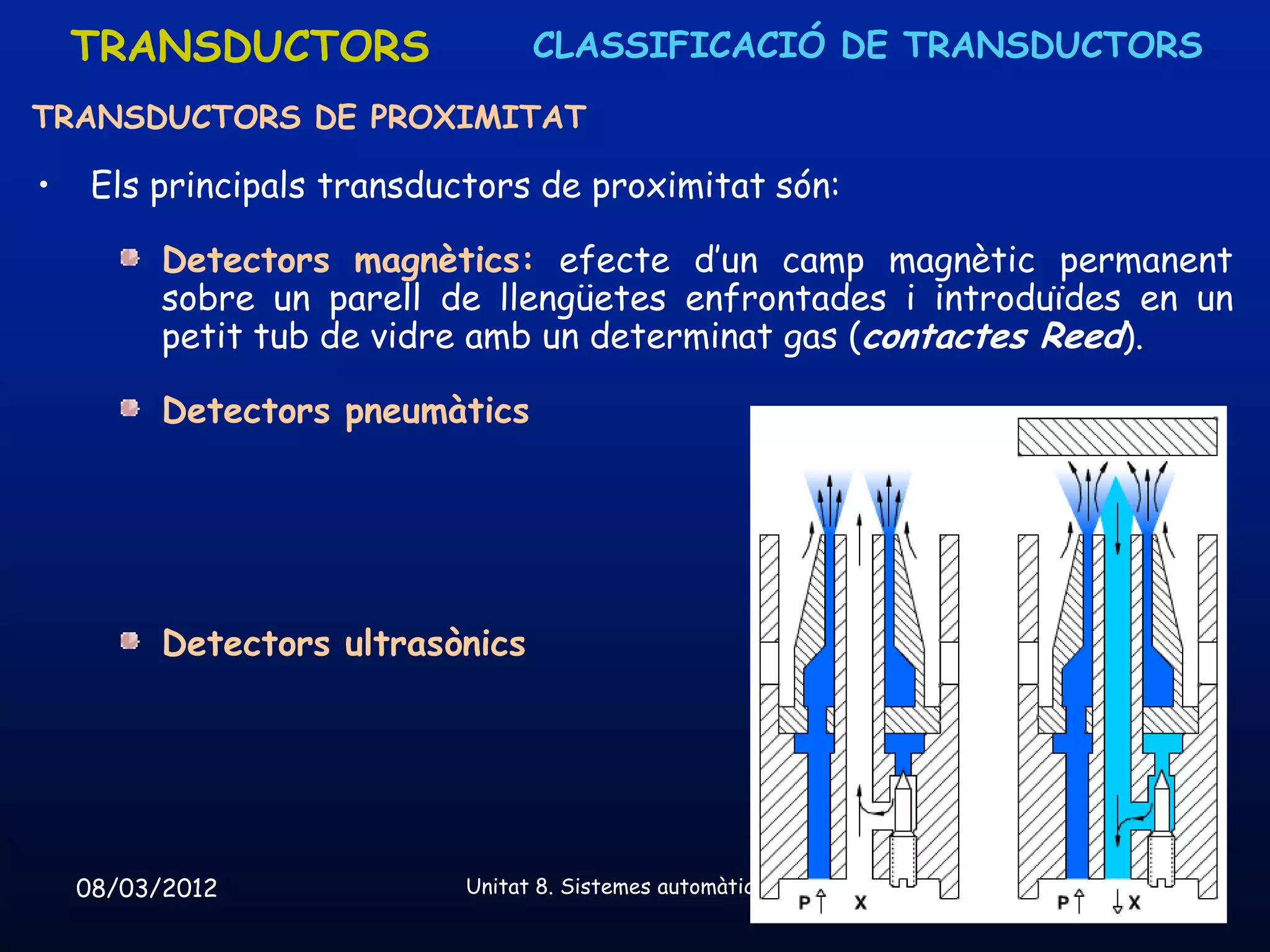
• Els principals transductors de proximitat són:
Detectors magnètics: efecte d’un camp magnètic permanent
sobre un parell de llengüetes enfrontades i introduïdes en un
petit tub de vidre amb un determinat gas (contactes Reed).
Detectors pneumàtics
Detectors ultrasònics
08/03/2012 Unitat 8. Sistemes automàtics i de control 69
70.
GENERADORS DE CONSIGNA,COMPARADORS I
ACTUADORS
El generador del valor de consigna o de referència consisteix en un
dispositiu capaç de generar un senyal de referència, el qual s’aplicarà al
comparador amb l’objecte de confrontar-lo amb el senyal realimentat
procedent del transductor, i generar així el senyal d’error o desviació
actiu.
Els senyals més utilitzats com a variables de referència solen ser la
tensió i el corrent elèctrics, la pressió pneumàtica o una posició
mecànica. En un sistema de calefacció, el valor de consigna seria el valor
de temperatura desitjat.
08/03/2012 Unitat 8. Sistemes automàtics i de control 70
71.
GENERADORS DE CONSIGNA,COMPARADORS I
ACTUADORS
08/03/2012 Unitat 8. Sistemes automàtics i de control 71
72.
GENERADORS DE CONSIGNA,COMPARADORS I
ACTUADORS
La gamma d’actuadors que pot governar un sistema de control és molt
àmplia i diversa.
Entre els més habituals hi ha els destinats a produir moviment
(motors, servomotors i cilindres), els assignats al transvasament de
fluids (bombes), els de tipus tèrmic (forns, estufes, bescanviadors, etc.)
i els de tipus lumínic (làmpades, lluminàries, etc.). Moltes vegades no
poden accionar-se directament des de la unitat de control i requereixen
algun preaccionament per amplificar el senyal de comandament.
Els preactuadors o preaccionadors més freqüents són els
relés, contactors, vàlvules distribuïdores, servovàlvules, variadors de
tensió, etc. Tant els actuadors com els preactuadors poden ser del tipus
tot o res o de tipus continu (analògic o digital).
08/03/2012 Unitat 8. Sistemes automàtics i de control 72
73.
GENERADORS DE CONSIGNA,COMPARADORS I
ACTUADORS
08/03/2012 Unitat 8. Sistemes automàtics i de control 73
L’AUTÒMAT PROGRAMABLE OPLC
http://www.youtube.com/watch?v=fKfKLzMYvtk
08/03/2012 Unitat 8. Sistemes automàtics i de control 77
78.
L’AUTÒMAT PROGRAMABLE OPLC
AVANTATGES DEL PLC
• Possibilitat d’introduir modificacions sense haver de canviar la xarxa
de connexions ni afegir-hi dispositius.
• Espai d’ocupació reduït.
• Reducció del cost de la mà d’obra de la instal·lació.
• Reducció del temps de l’elaboració del projecte.
• Possibilitat de comandar diferents màquines amb un únic autòmat.
• Reducció del temps de la posada en funcionament de la instal·lació, ja
que queda reduït el temps de cablatge. A més, el mateix programa pot
servir per automatitzar un nombre infinit de màquines o instal·lacions
similars.
• Reducció del cost de manteniment. Com que es redueix el nombre de
components i el cablatge, s’augmenta la fiabilitat del sistema i
disminueix el nombre d’avaries i, a més, la resolució d’aquestes avaries
resulta més fàcil i ràpida.
• Reutilització del PLC. Si una màquina o instal·lació queda fora de
servei, l’autòmat segueix sent vàlid per fer-lo servir en una altra.
08/03/2012 Unitat 8. Sistemes automàtics i de control 78
79.
L’AUTÒMAT PROGRAMABLE OPLC
INCONVENIENTS DEL PLC
• Necessitat de disposar de personal amb un cert grau d’especialització
per programar-lo i fer el manteniment posterior.
• En certes aplicacions, el seu preu inicial pot resultar un
inconvenient, ja que podria ser més elevat que altres opcions
tecnològiques.
Caldrà, llavors, fer un estudi més exhaustiu i analitzar tots els altres
factors que intervenen en el procés d’automatització per trobar la
solució òptima.
08/03/2012 Unitat 8. Sistemes automàtics i de control 79
80.
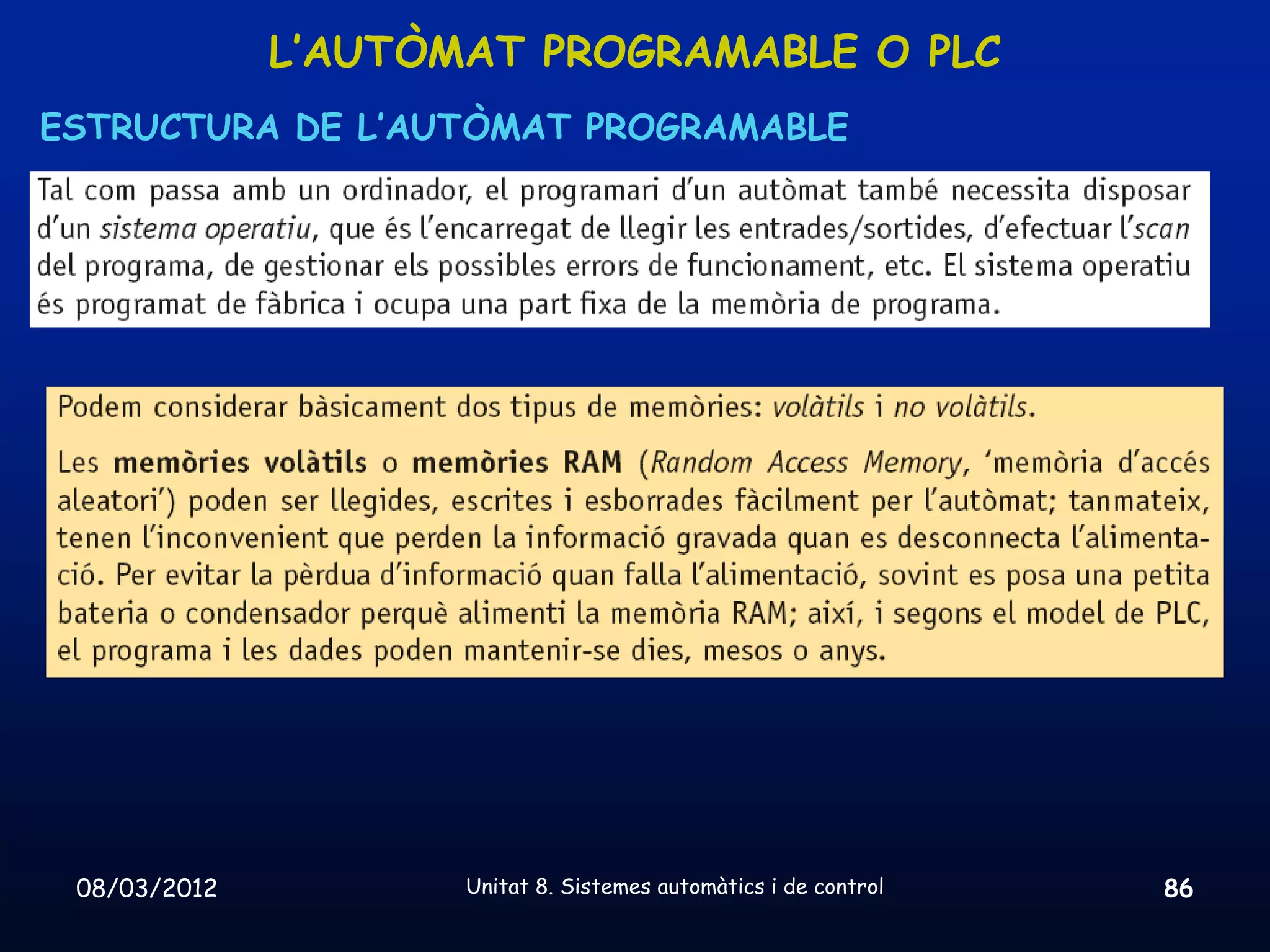
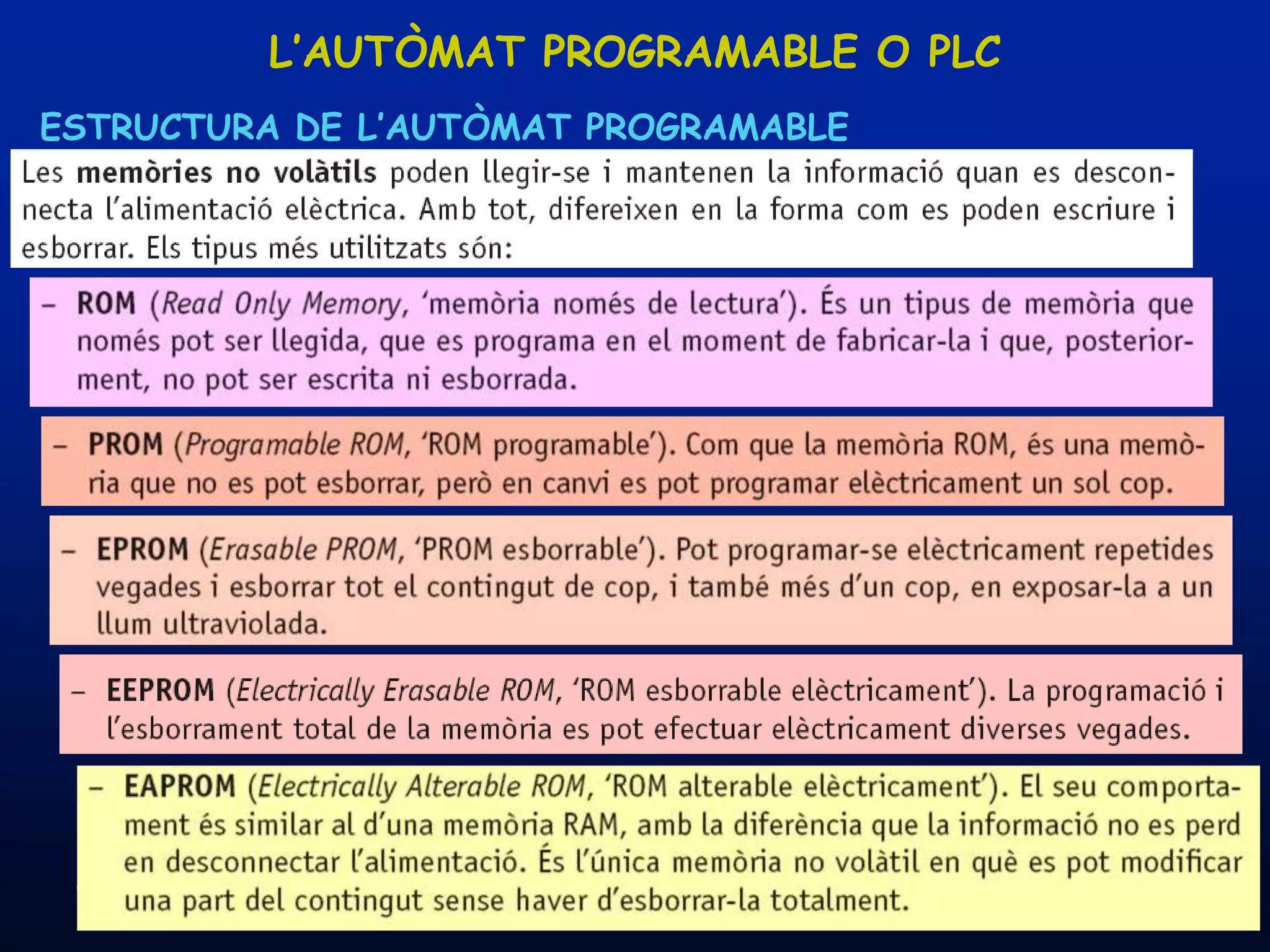
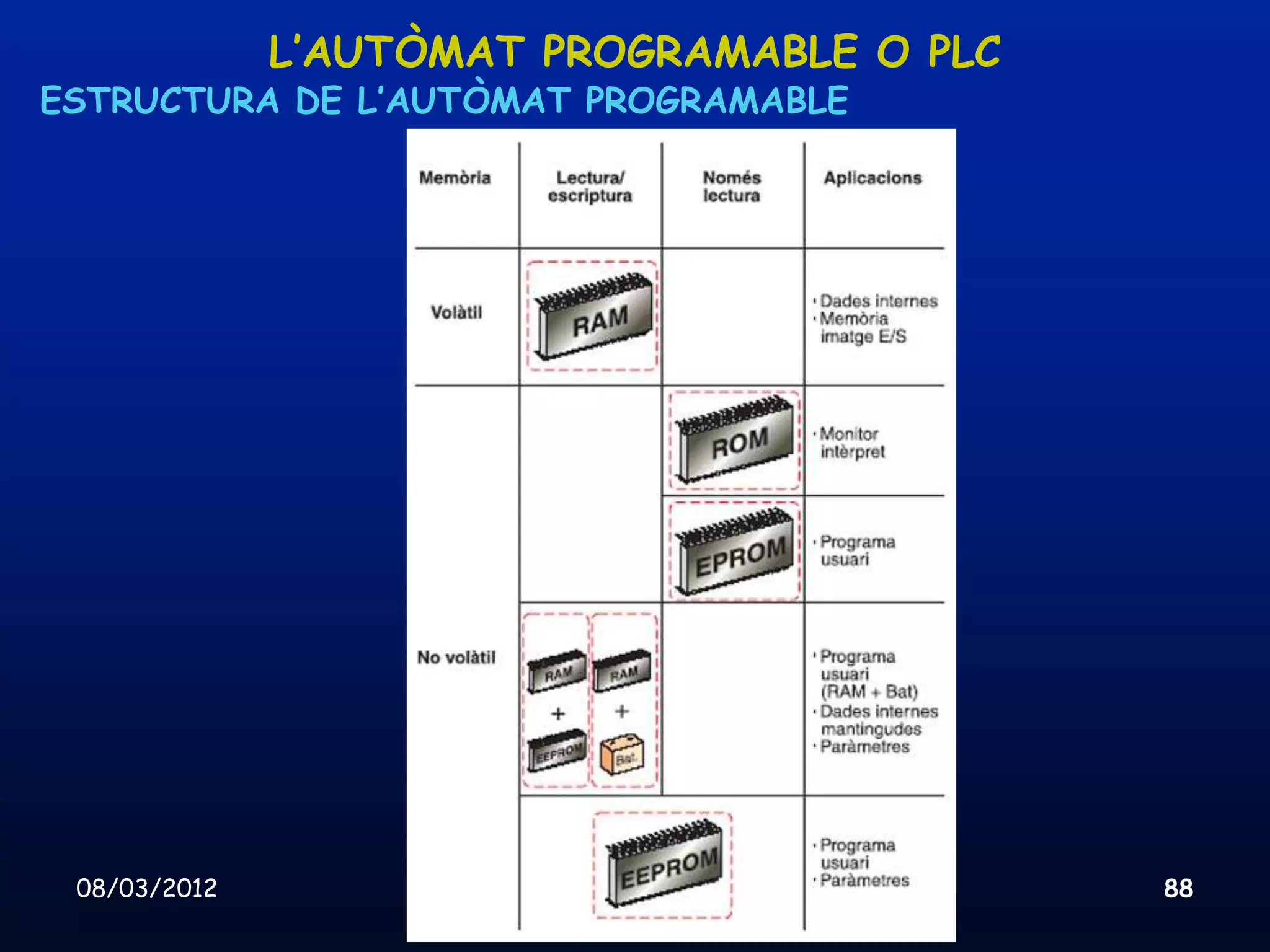
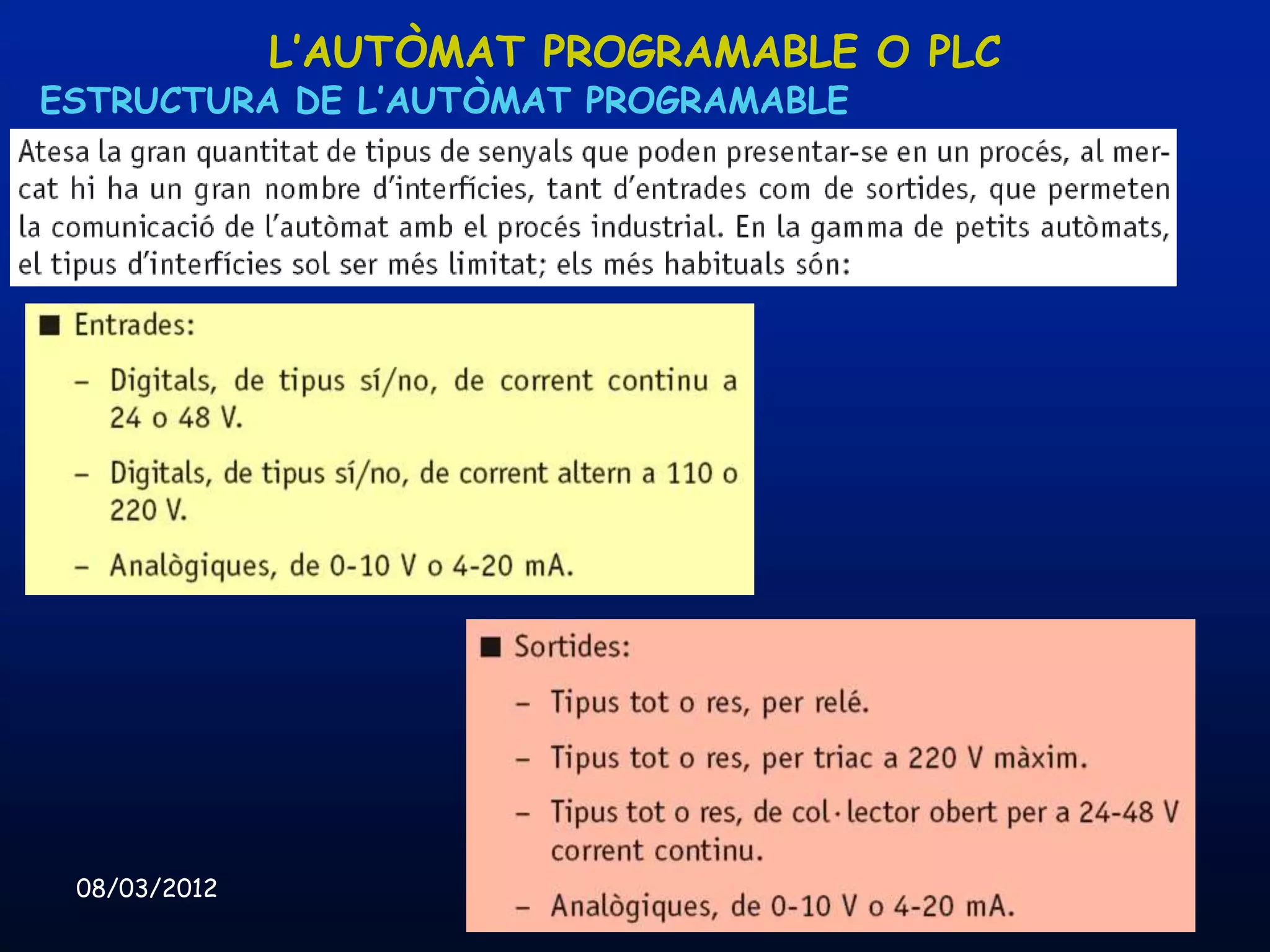
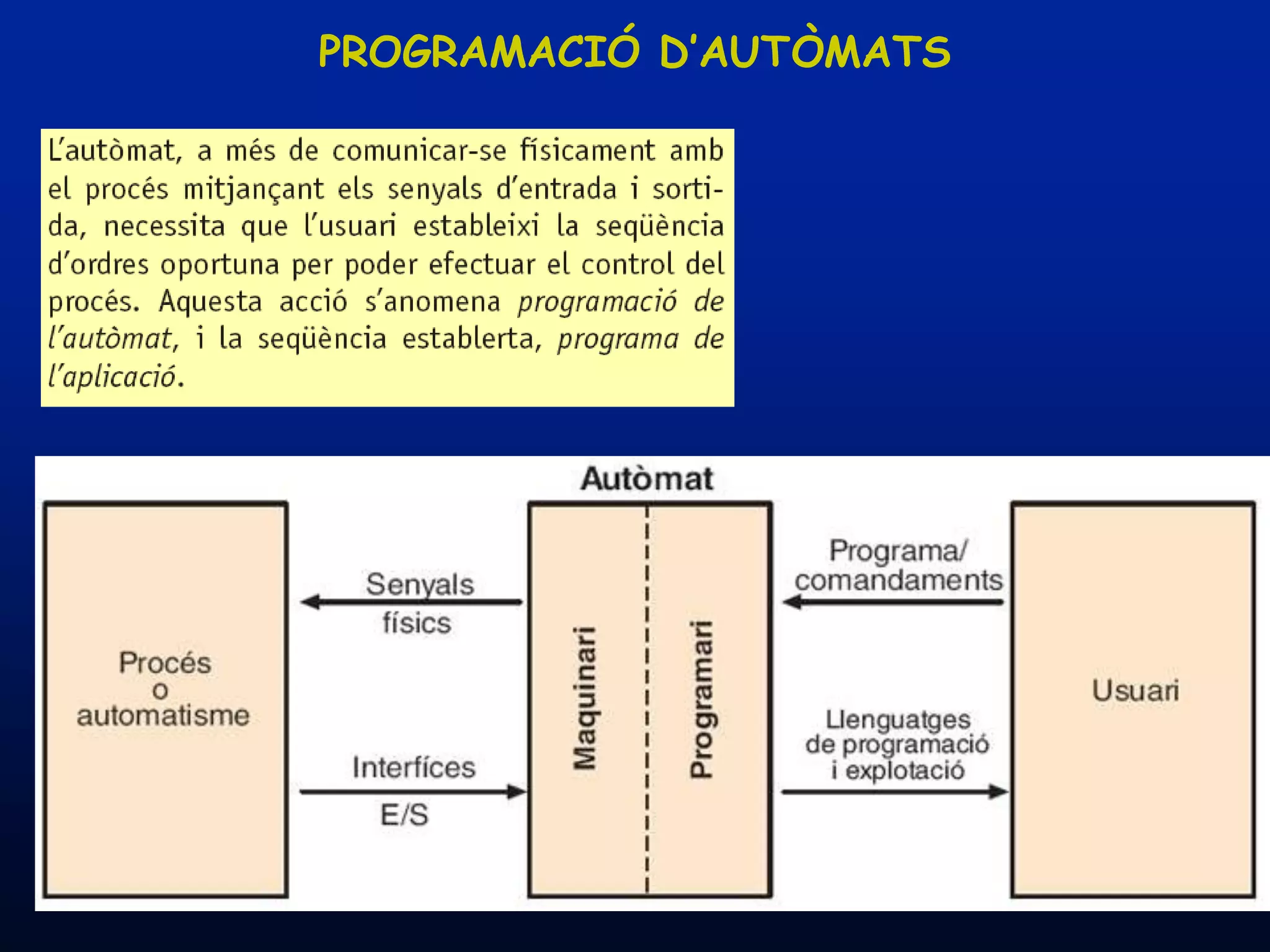
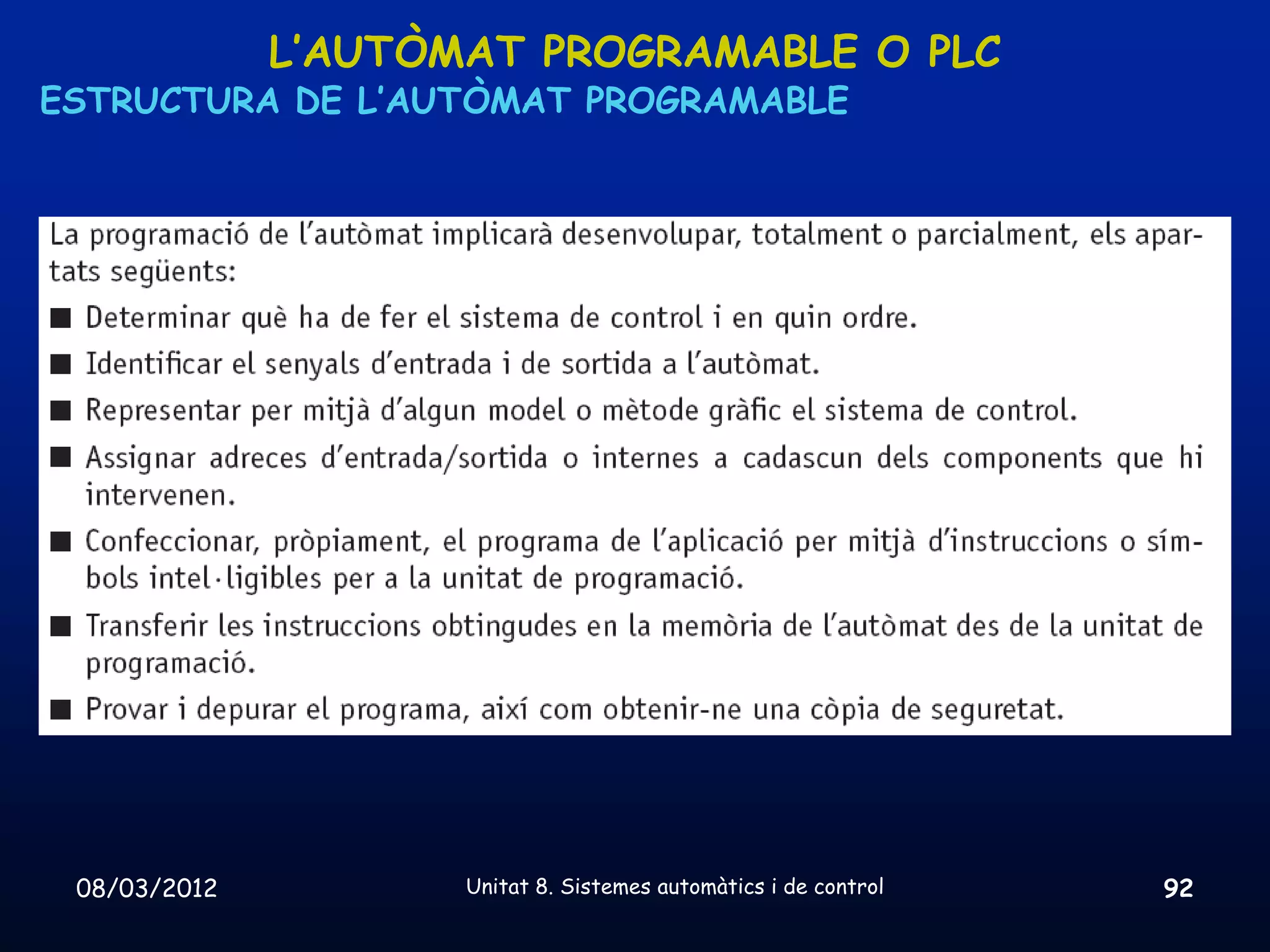
L’AUTÒMAT PROGRAMABLE OPLC
ESTRUCTURA DE L’AUTÒMAT PROGRAMABLE
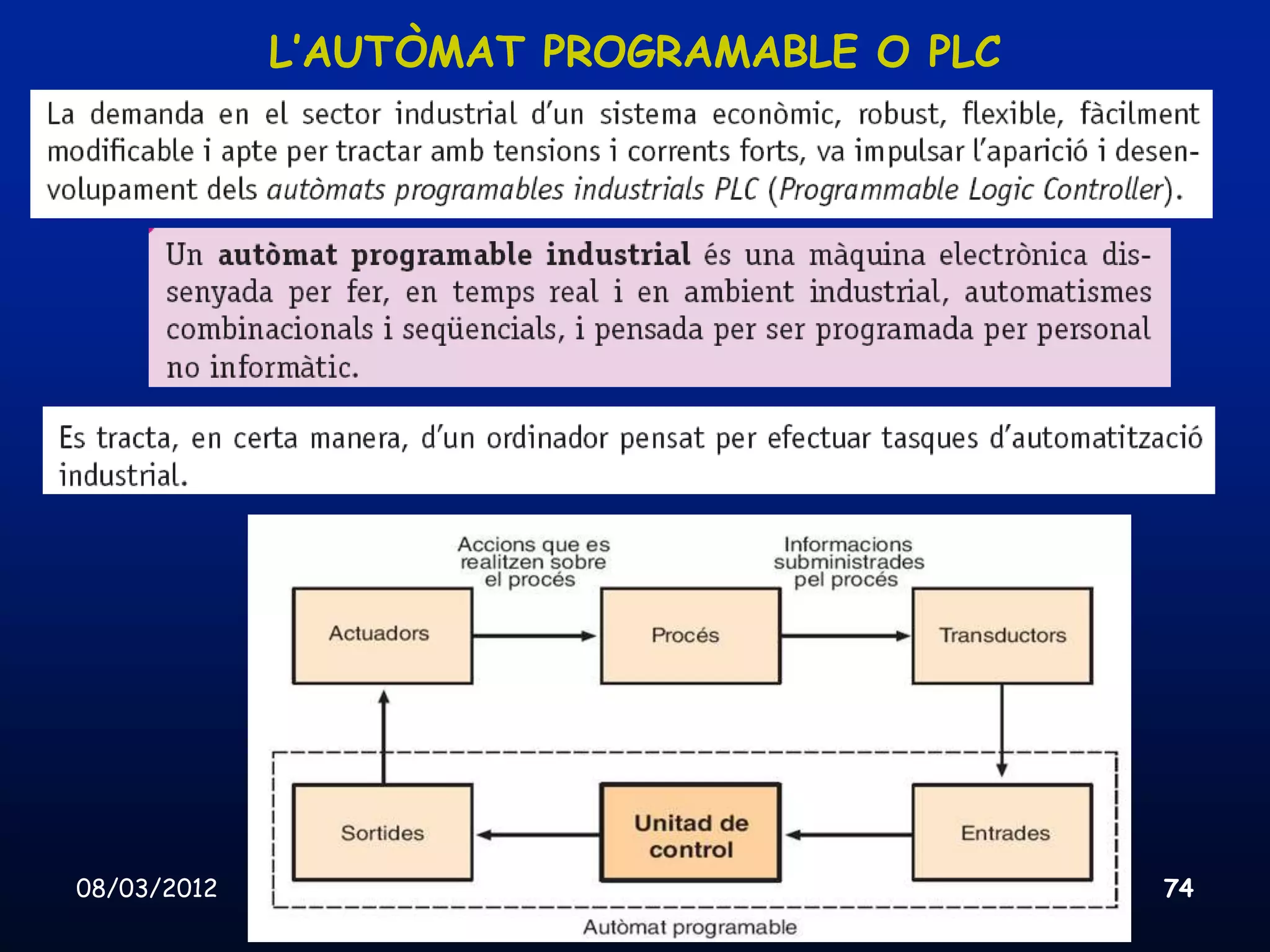
Un autòmat programable industrial és un equip electrònic de control, que
consta d’un maquinari, independent del procés que es vol controlar, i d’un
programari que conté la seqüència d’operacions de control que cal dur a
terme.
D’acord amb aquest programa de control prèviament emmagatzemat en
una memòria, l’autòmat governa els senyals de sortida a partir de
l’estat dels senyals d’entrada. Tant els senyals d’entrada a l’autòmat
com els de sortida al procés es cablen directament en els borns de
connexió del PLC.
08/03/2012 Unitat 8. Sistemes automàtics i de control 80
81.
L’AUTÒMAT PROGRAMABLE OPLC
ESTRUCTURA DE L’AUTÒMAT PROGRAMABLE
Els senyals d’entrada poden procedir:
• d’elements digitals (finals de cursa, detectors de proximitat, etc.)
• d’analògics (sensors, transductors, etc.).
Els senyals de sortida són:
• ordres digitals
• tot o res
• senyals analògics en tensió o corrent
que actuen sobre elements indicadors
(pilots, visualitzadors, timbres, etc.) i sobre elements accionadors
(relés, contactors, vàlvules, etc.).
08/03/2012 Unitat 8. Sistemes automàtics i de control 81
82.
L’AUTÒMAT PROGRAMABLE OPLC
ESTRUCTURA DE L’AUTÒMAT PROGRAMABLE
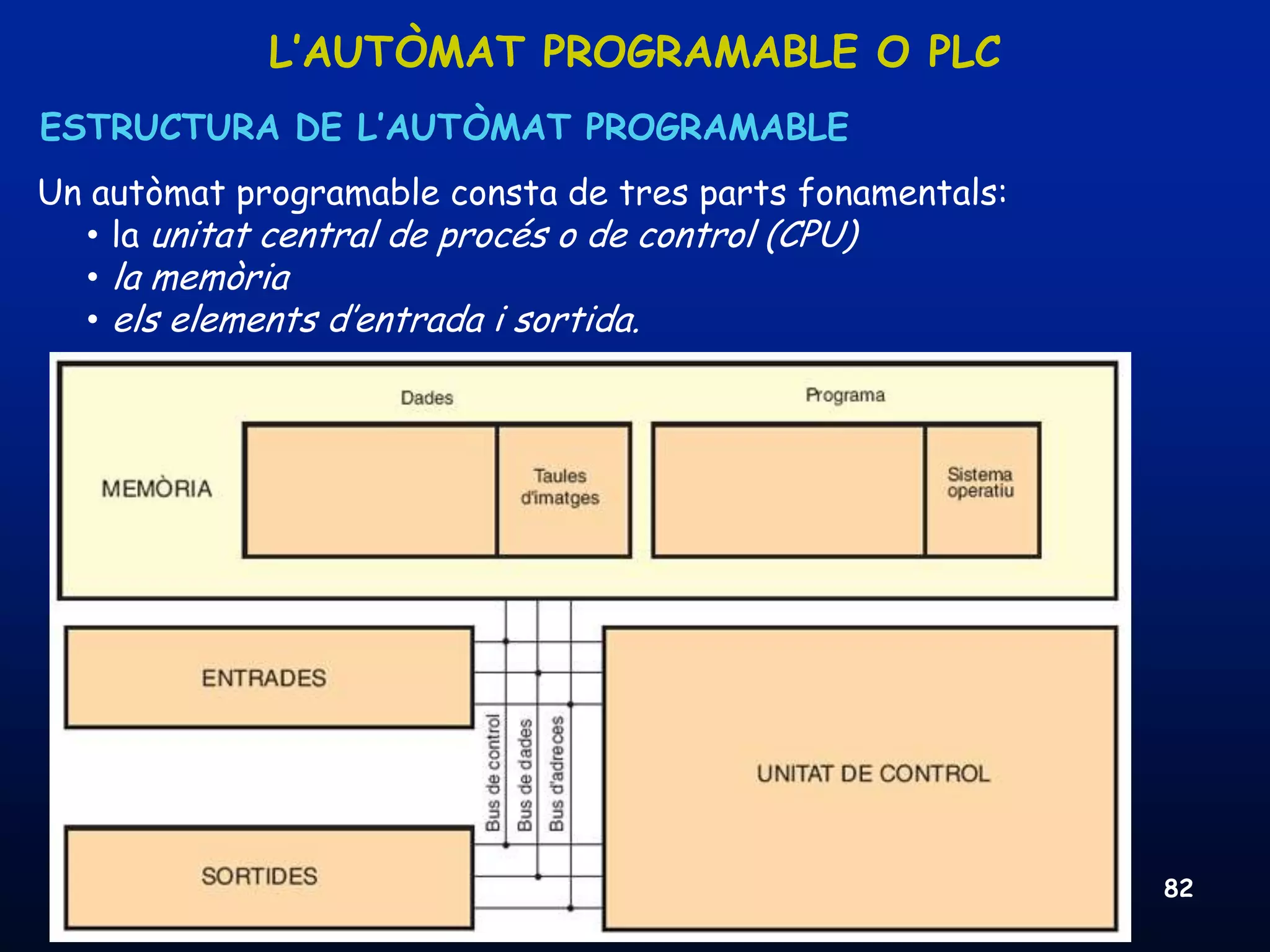
Un autòmat programable consta de tres parts fonamentals:
• la unitat central de procés o de control (CPU)
• la memòria
• els elements d’entrada i sortida.
08/03/2012 Unitat 8. Sistemes automàtics i de control 82
83.
L’AUTÒMAT PROGRAMABLE OPLC
ESTRUCTURA DE L’AUTÒMAT PROGRAMABLE
08/03/2012 Unitat 8. Sistemes automàtics i de control 83
84.
L’AUTÒMAT PROGRAMABLE OPLC
ESTRUCTURA DE L’AUTÒMAT PROGRAMABLE
08/03/2012 Unitat 8. Sistemes automàtics i de control 84
85.
L’AUTÒMAT PROGRAMABLE OPLC
ESTRUCTURA DE L’AUTÒMAT PROGRAMABLE
08/03/2012 Unitat 8. Sistemes automàtics i de control 85
86.
L’AUTÒMAT PROGRAMABLE OPLC
ESTRUCTURA DE L’AUTÒMAT PROGRAMABLE
08/03/2012 Unitat 8. Sistemes automàtics i de control 86
87.
L’AUTÒMAT PROGRAMABLE OPLC
ESTRUCTURA DE L’AUTÒMAT PROGRAMABLE
08/03/2012 Unitat 8. Sistemes automàtics i de control 87
88.
L’AUTÒMAT PROGRAMABLE OPLC
ESTRUCTURA DE L’AUTÒMAT PROGRAMABLE
08/03/2012 Unitat 8. Sistemes automàtics i de control 88
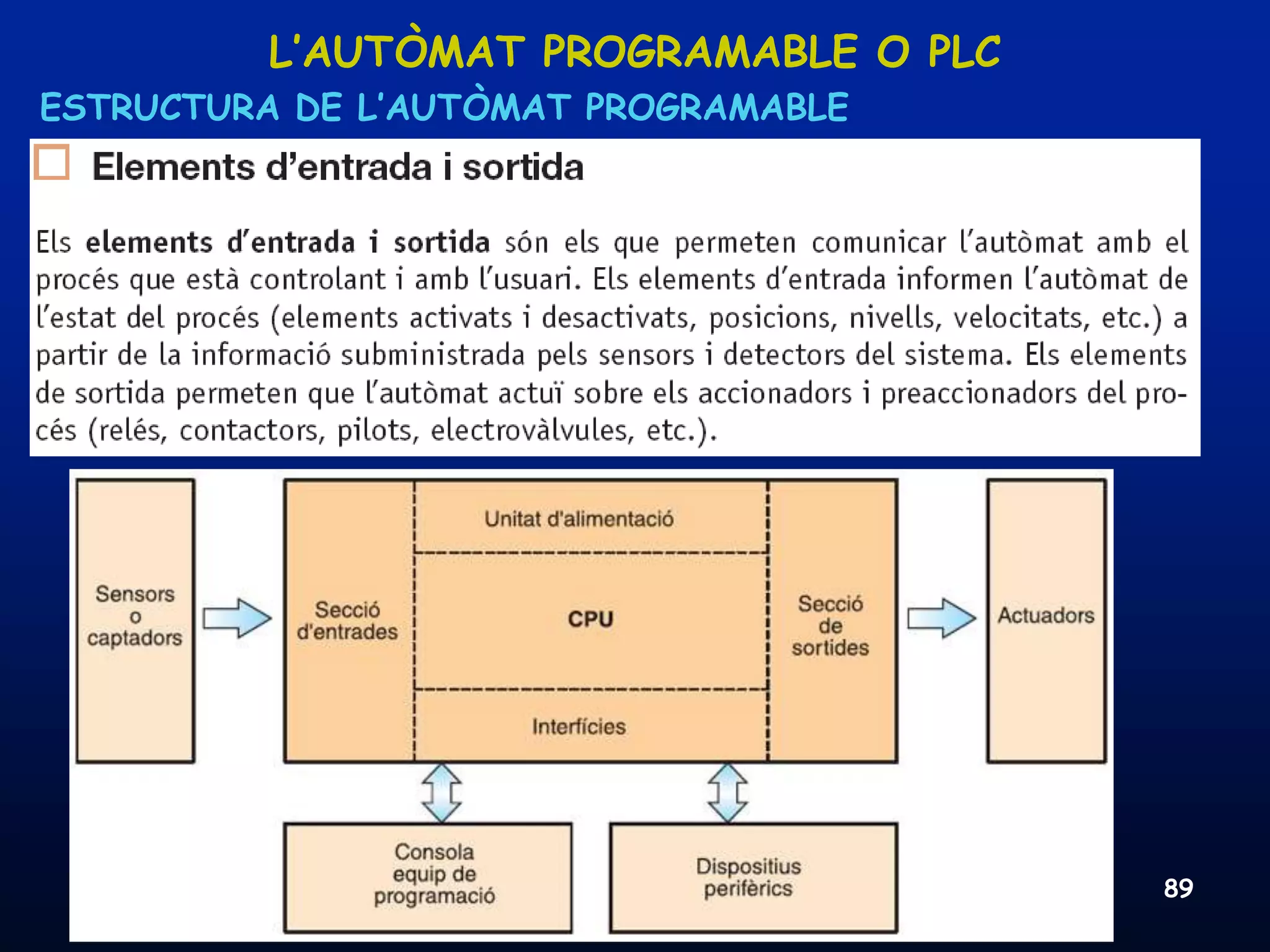
89.
L’AUTÒMAT PROGRAMABLE OPLC
ESTRUCTURA DE L’AUTÒMAT PROGRAMABLE
08/03/2012 Unitat 8. Sistemes automàtics i de control 89
90.
L’AUTÒMAT PROGRAMABLE OPLC
ESTRUCTURA DE L’AUTÒMAT PROGRAMABLE
08/03/2012 Unitat 8. Sistemes automàtics i de control 90





















































![Automatizació [original]](https://cdn.slidesharecdn.com/ss_thumbnails/automatizacioriginal-130425113850-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)

























