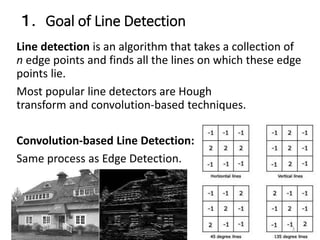
This document summarizes recent developments in line detection techniques for computer vision. It discusses the goal of line detection and how it differs from edge detection. It then explains techniques like the successive approximation method, Hough transform, RANSAC, and how the Hough transform can be used for vanishing point detection. Applications like rectangle detection using these techniques are also covered. Key algorithms and their strengths/weaknesses are outlined for each method.
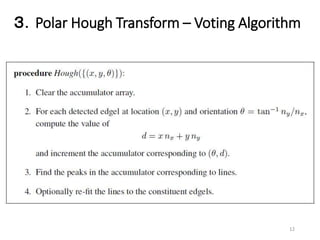

![6.Applications
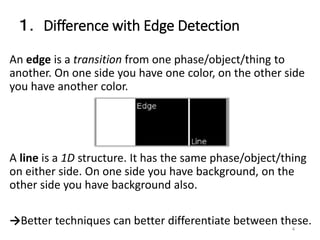
Rectangle Detection:
Step 1) First, detect all vanishing points
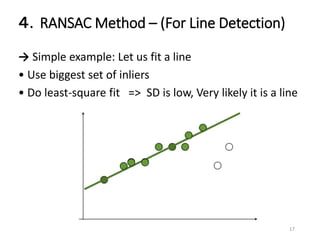
Step 2) Detect the Edge points/Lines that are aligned along
vanishing lines.
We then efficiently recover the inter-sections of pairs of
lines corresponding to different vanishing points. (論文[8])22](https://image.slidesharecdn.com/line-detection-parth-4x3-200726131528/85/Line-Detection-in-Computer-Vision-Recent-Developments-and-Applications-22-320.jpg)
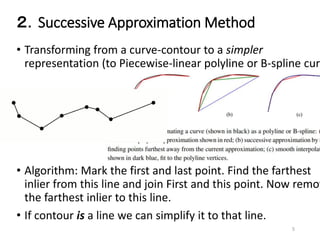
![6.Applications
Rectangle Detection:
Using only Hough
Detection is an 8D
vector-space problem
(論文[8]).
Major Quadrilaterals in
image can be detected
using only Vanishing
Point and Line Detection
(論文[8]).
23](https://image.slidesharecdn.com/line-detection-parth-4x3-200726131528/85/Line-Detection-in-Computer-Vision-Recent-Developments-and-Applications-23-320.jpg)
![References
[1] Polar Hough:
https://www.wikiwand.com/en/Hough_transform
[2] Hough Accumulator:
https://chmodux.wordpress.com/2012/04/16/target-
acquisition/
[3] Ransac:
https://www.slideshare.net/allynjoycalcaben/computer-
vision-feature-matching-with-ransac-algorithm
[4] Homographies:
https://docs.opencv.org/master/d9/dab/tutorial_homog
raphy.html
24](https://image.slidesharecdn.com/line-detection-parth-4x3-200726131528/85/Line-Detection-in-Computer-Vision-Recent-Developments-and-Applications-24-320.jpg)
![References
[5] Ransac animation:
https://kapernikov.com/cable-detection-in-lidar-data/
[6] Various:
Computer Vision: Algorithms and Applications by Richard
Szeliski
[7] Vanishing Points Examples:
http://teresabernardart.com/the-rules-of-
perspective/#:~:text=There%20are%20three%20basic%20
types,illusion%20of%20depth%20and%20space.
[8] Rectangle Detection Algorithm:
https://www.researchgate.net/publication/228697341_Pe
rspective_rectangle_detection 25](https://image.slidesharecdn.com/line-detection-parth-4x3-200726131528/85/Line-Detection-in-Computer-Vision-Recent-Developments-and-Applications-25-320.jpg)