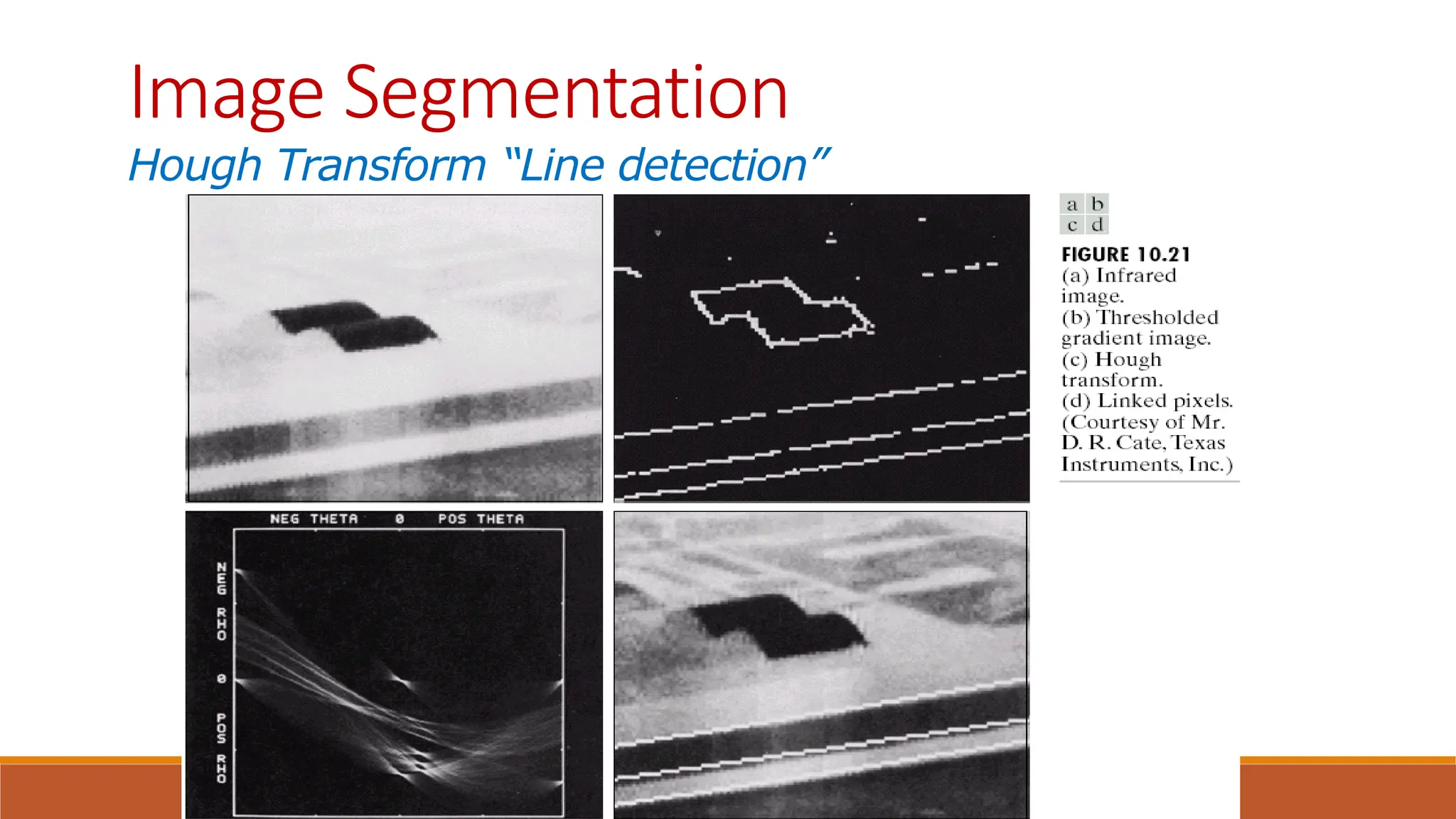
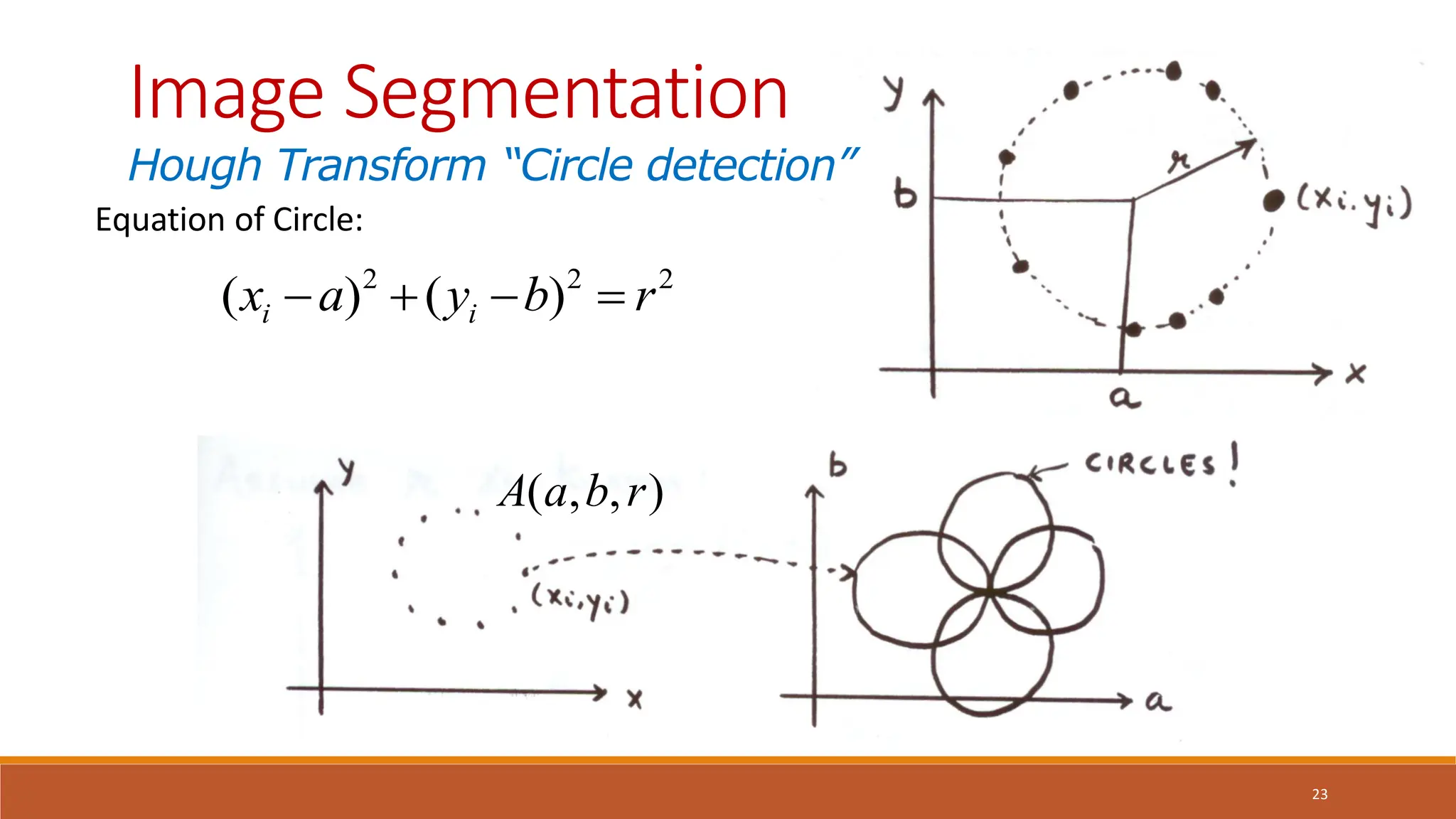
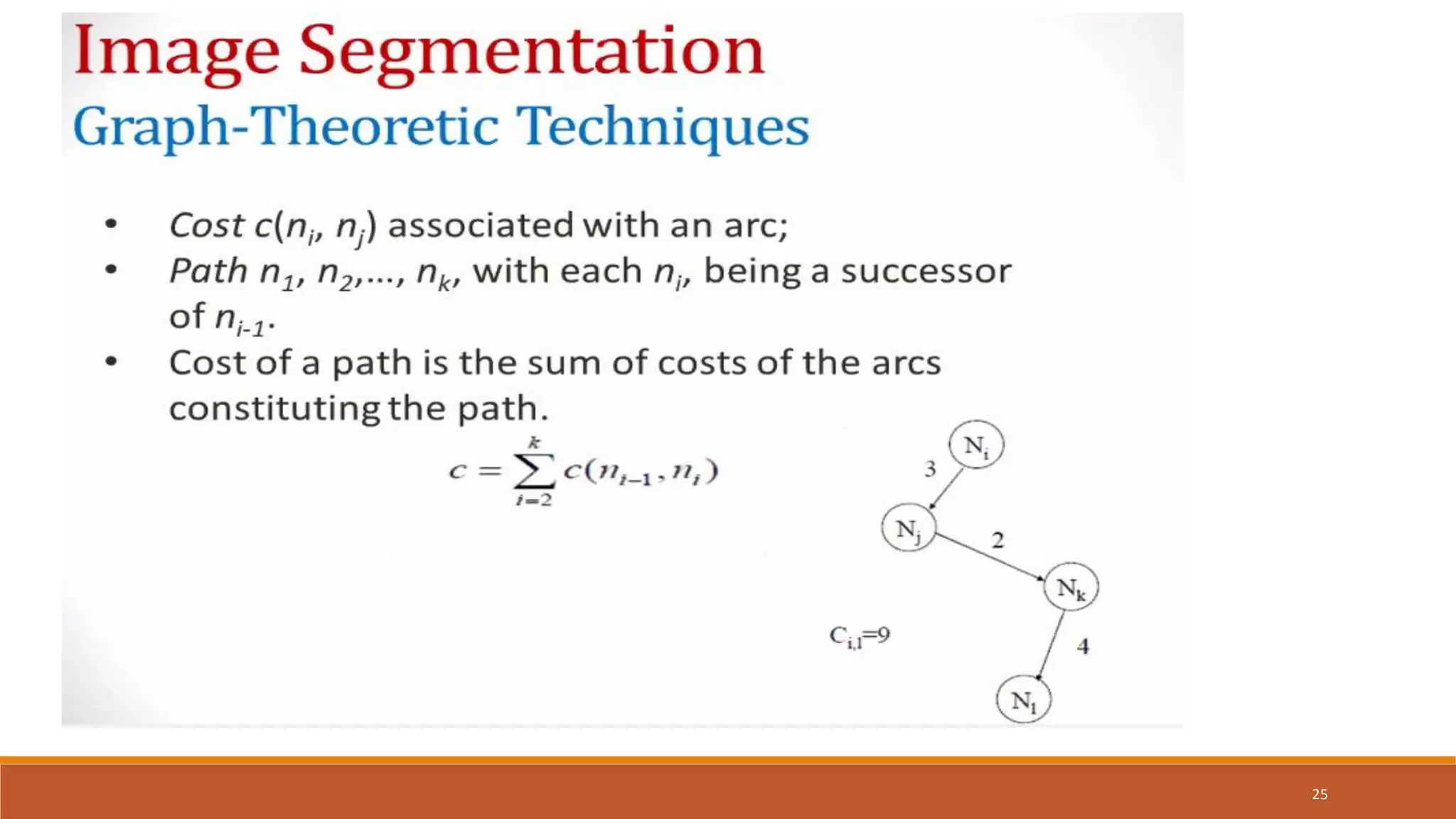
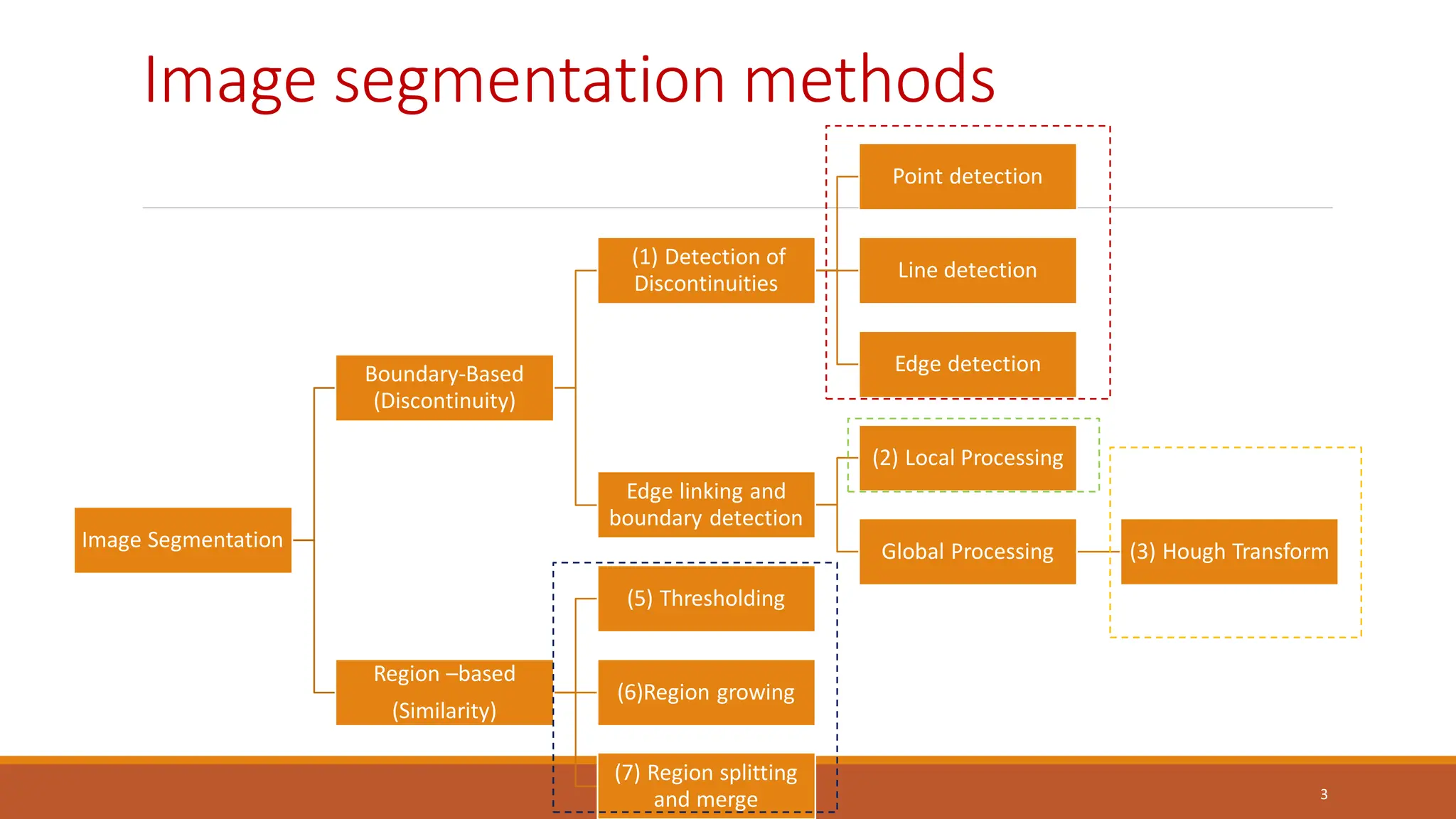
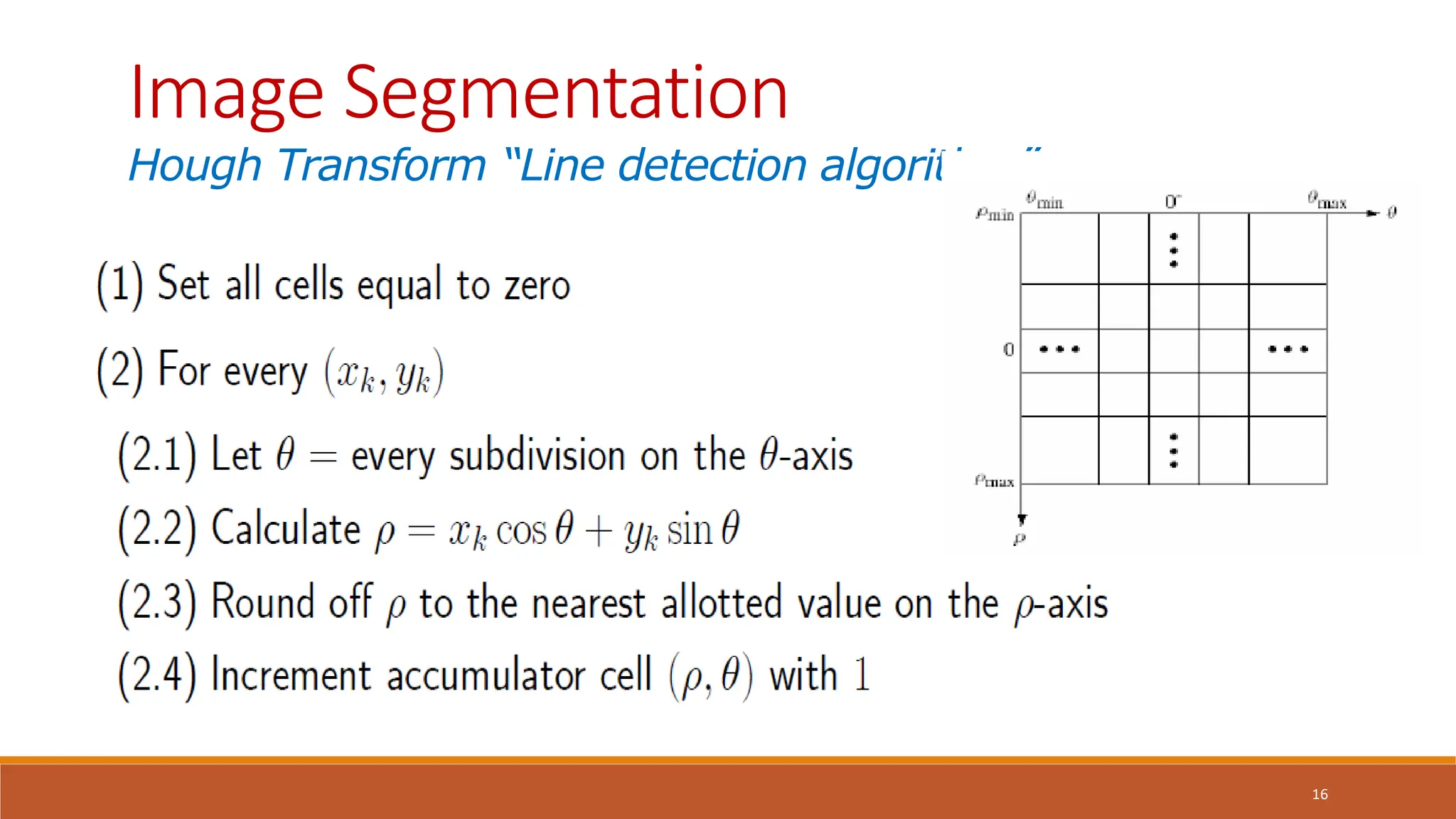
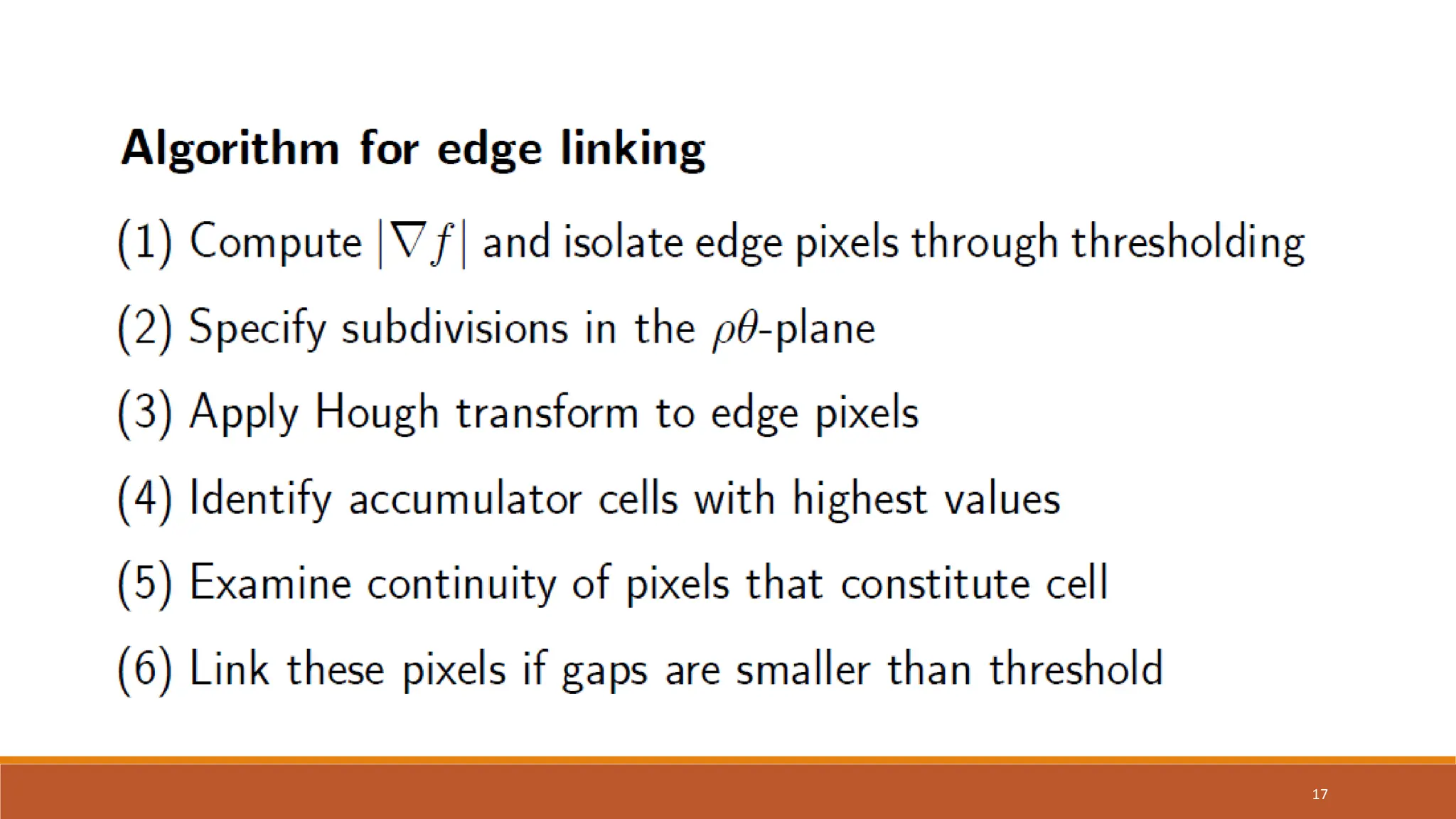
The document discusses image segmentation techniques, particularly focusing on boundary detection and edge linking methods such as local processing and the Hough transform. It explains how edge points are identified and linked using properties like strength and direction. Additionally, it covers the Hough transform for line detection, its algorithmic approach, and challenges associated with effective line and circle detection.
![19
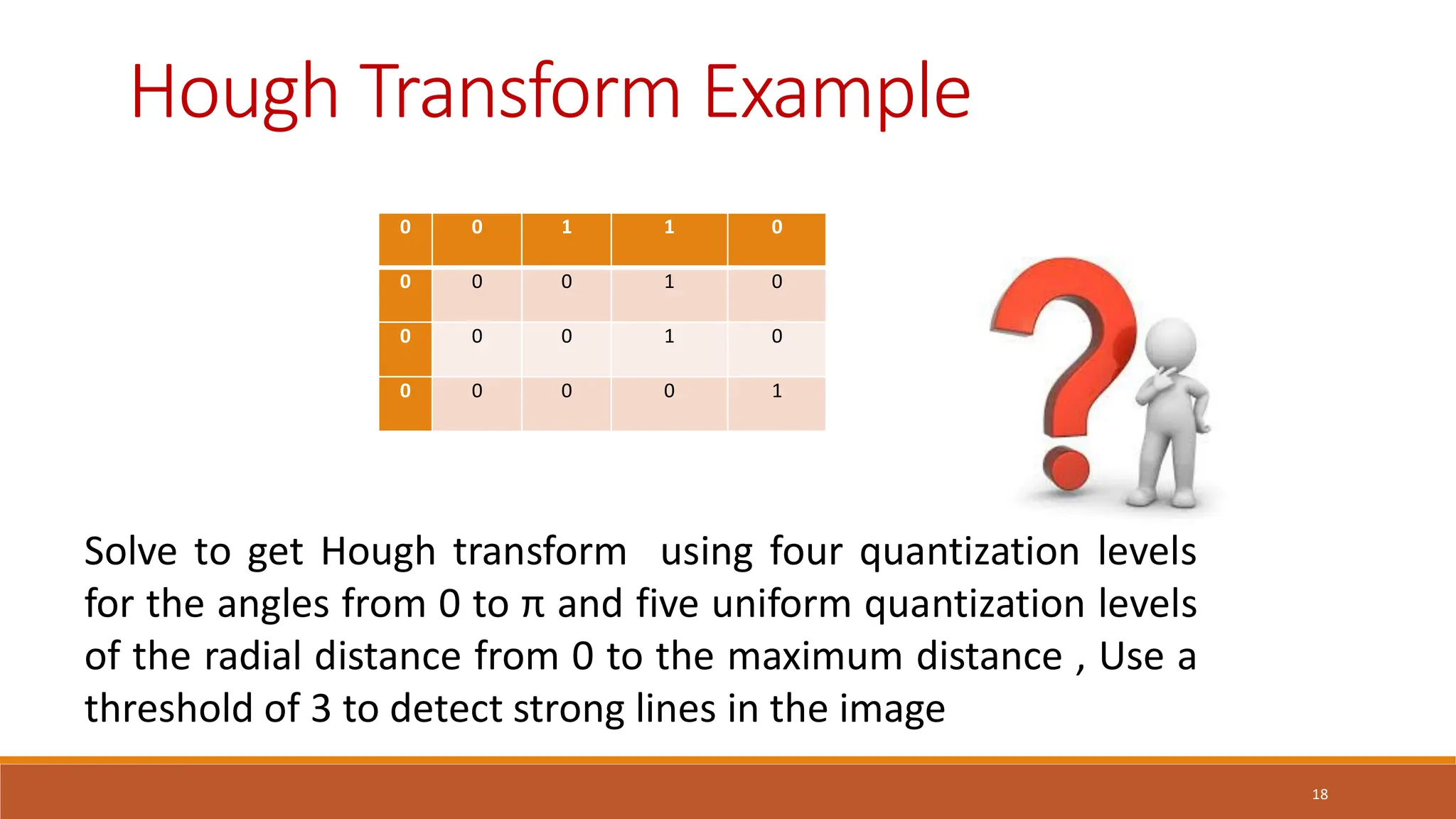
ϴ=[0,𝜋], 4 levels
ϴ =[0,
𝜋
4
,
𝜋
2
,
3𝜋
4
, 𝜋]
=[0,max _𝑑𝑖𝑠𝑡𝑎𝑛𝑐𝑒]=[0,𝐷], 5 levels
D=[(0,0),(3,4)]= 9 + 16 = 5
ϴ =[0,1,2,3,4,5]
0
1
2
3
4
5
4
2
4
3
4
4
4
0 0 1 1 0
0 0 0 1 0
0 0 0 1 0
0 0 0 0 1
First Index: (0,2), x=0,y=2
](https://image.slidesharecdn.com/lecture8imagesegmentation2-241229150148-598f5ed9/75/Lecture-8_Image-Segmentation_2_dip__-pdf-19-2048.jpg)
![20
0
0 2 3 1
1 6 1
2
2[0,2],[0,4
]
5 0
3 1 8 4
4 9
5
4
2
4
3
4
4
4
First Index: (0,3), x=0,y=3
ϴ =0 ϴ =
𝜋
4
ϴ =
𝜋
2
ϴ =
3𝜋
4
ϴ =𝜋
=(0)𝑐𝑜𝑠(0)+3sin(0)=0 =(0)𝑐𝑜𝑠(
𝜋
4
)+3si
n(
𝜋
4
)=3
=(0)𝑐𝑜𝑠(
𝜋
2
)+
2sin(
𝜋
2
)=2 =(0)𝑐𝑜𝑠(
3𝜋
4
)+
2sin(
3𝜋
)=3
=
(0)𝑐𝑜𝑠(𝜋)
+2sin(𝜋)
=0
= 𝑥𝑐𝑜𝑠ϴ+ysinϴ
](https://image.slidesharecdn.com/lecture8imagesegmentation2-241229150148-598f5ed9/75/Lecture-8_Image-Segmentation_2_dip__-pdf-20-2048.jpg)