Downloaded 202 times
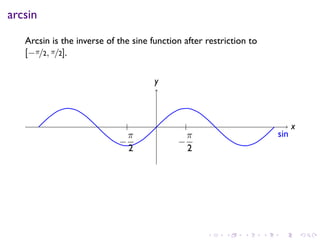
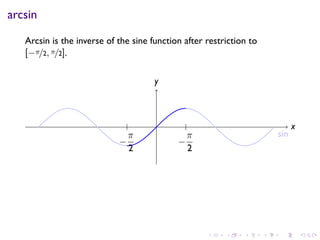
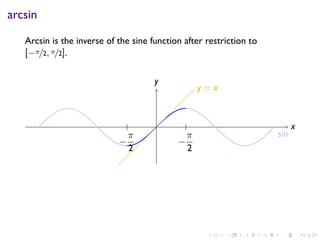
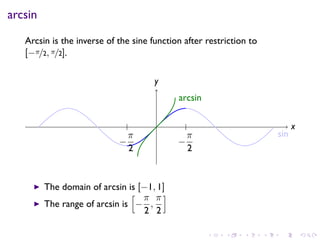
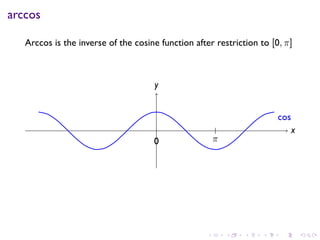
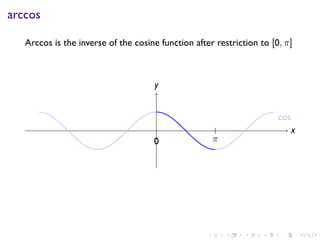
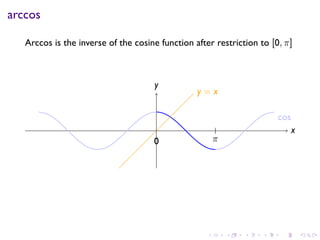
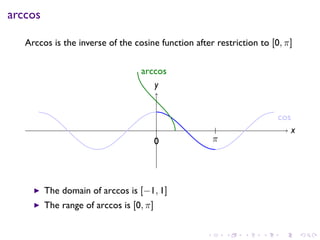
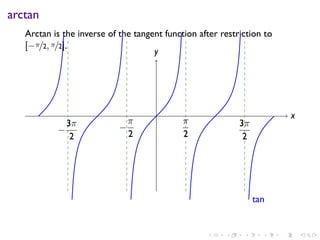
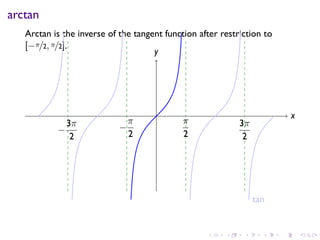
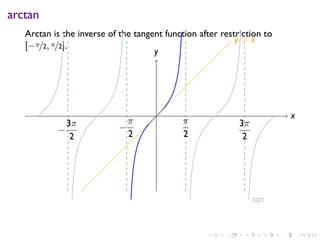
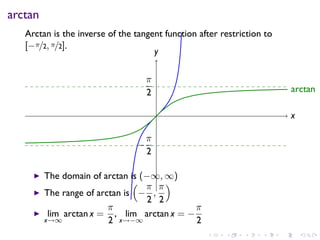
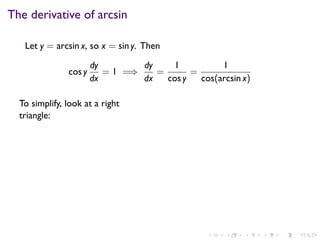
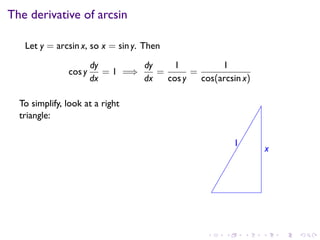
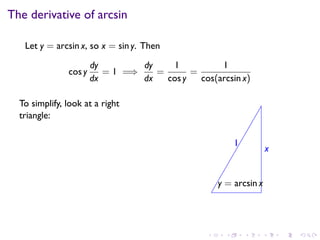
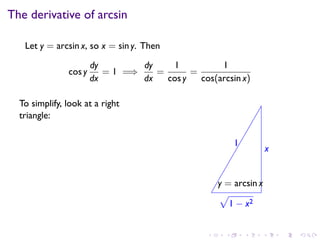
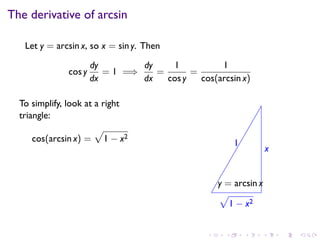
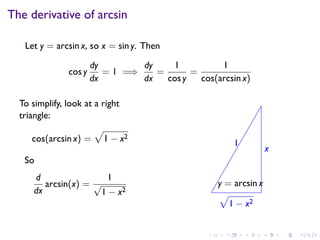
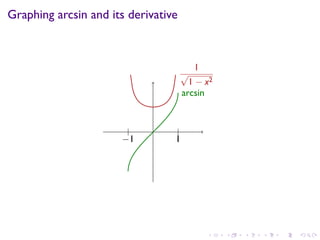
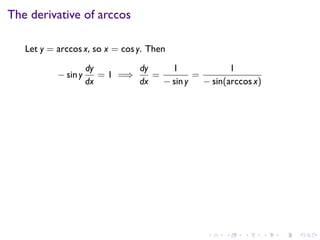
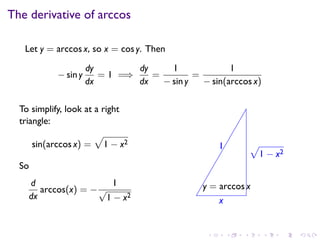
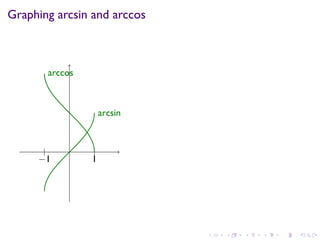
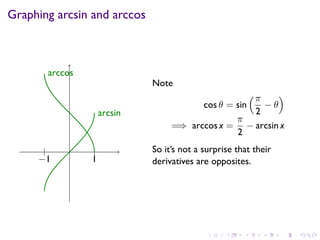
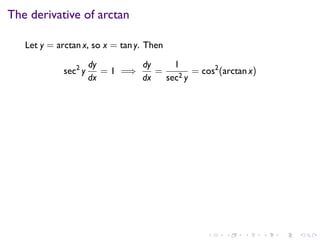
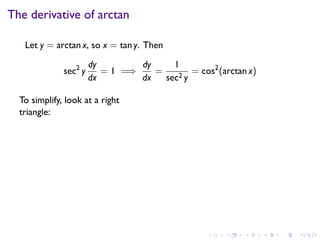
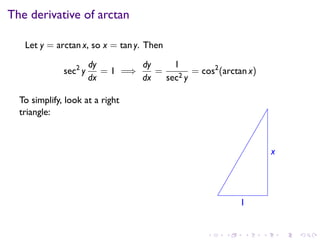
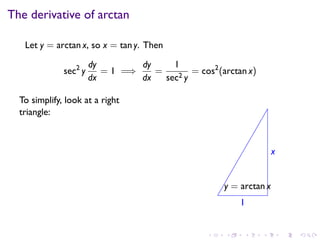
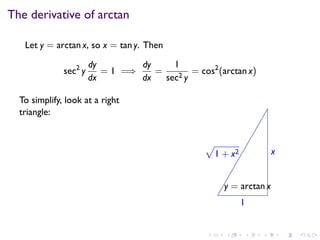
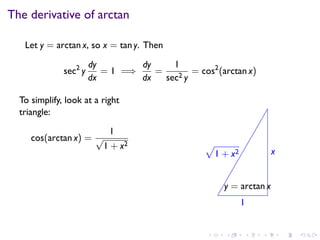
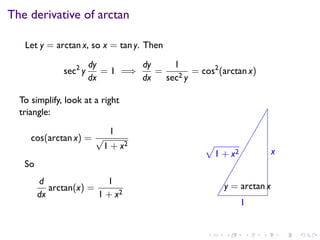


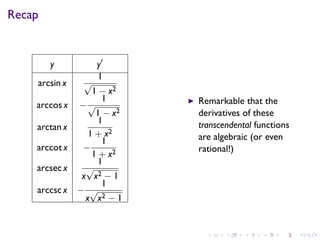

1. The document discusses inverse trigonometric functions such as arcsin, arccos, and arctan. 2. It derives the derivatives of these inverse functions using the Inverse Function Theorem and properties of trigonometric functions. 3. The derivatives are derived to be 1/(√(1-x^2)) for arcsin, 1/√(1-x^2) for arccos, and 1/(1+x^2) for arctan.


































![Inverse trigonometric functions xii[1]](https://cdn.slidesharecdn.com/ss_thumbnails/inversetrigonometricfunctionsxii1-110816104305-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)






































































