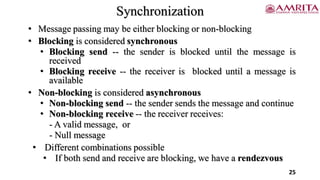
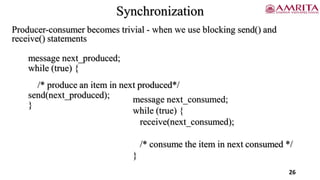
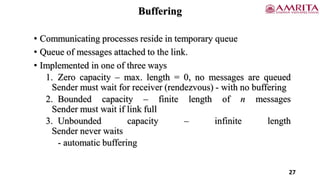
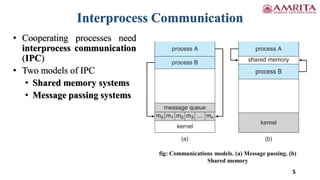
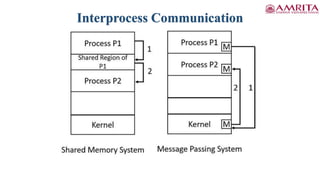
The document discusses interprocess communication (IPC) in systems, focusing on shared memory and message passing models. It outlines the advantages and reasons for process cooperation, including information sharing and speedup, and details on producer-consumer problems in IPC. Additionally, it explains methods of synchronization, different types of communication links, and the mechanisms behind message passing.
![Bounded-Buffer – Shared-Memory Solution
• Shared data
#define BUFFER_SIZE 10
typedef struct {
. . .
} item;
item buffer[BUFFER_SIZE];
int in = 0; /* points to next free position in the buffer */
int out = 0; /* points to first full position in the buffer */
• Solution is correct, but can only use BUFFER_SIZE-1 elements
10](https://image.slidesharecdn.com/lecture-4processmanagement-220630052357-9e86f633/85/Lecture-4_Process-Management-pdf-10-320.jpg)
![Bounded-Buffer – Producer
item next_produced;
while (true) {
/* produce an item in next produced */
while (((in + 1) % BUFFER_SIZE) == out) ;
/* do nothing */
buffer[in] = next_produced;
in = (in + 1) % BUFFER_SIZE;
}
11](https://image.slidesharecdn.com/lecture-4processmanagement-220630052357-9e86f633/85/Lecture-4_Process-Management-pdf-11-320.jpg)
![Bounded Buffer – Consumer
item next_consumed;
while (true) {
while (in == out)
; /* do nothing */
next_consumed = buffer[out];
out = (out + 1) % BUFFER_SIZE;
/* consume the item in next consumed */
}
12](https://image.slidesharecdn.com/lecture-4processmanagement-220630052357-9e86f633/85/Lecture-4_Process-Management-pdf-12-320.jpg)