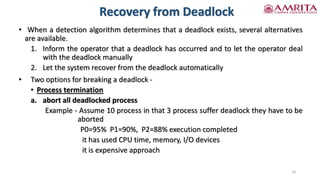
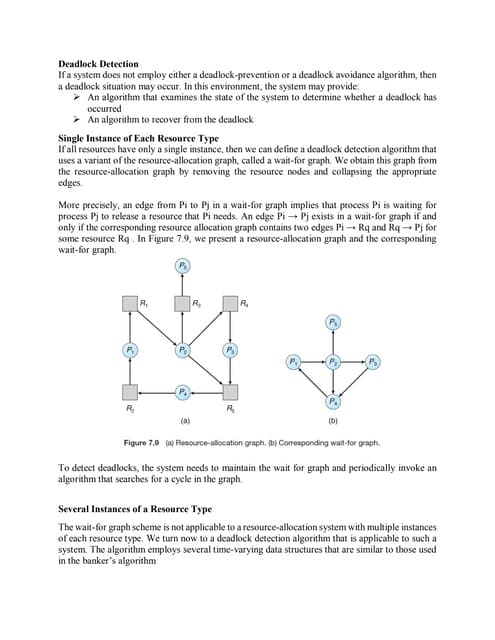
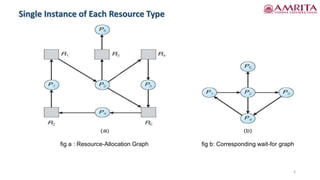
The document discusses deadlock detection and recovery strategies in systems with one or several instances of resource types. It outlines methods for detecting deadlocks, including resource-allocation graphs and wait-for graphs, and provides algorithms for determining deadlock states. Additionally, it covers recovery options such as process termination and resource preemption to resolve deadlocks.
![Several Instances of a Resource Type
• The wait-for graph scheme is not applicable to a resource-allocation system with
multiple instances of each resource type
• The algorithm employs several time-varying data structures
• Available - A vector of length m indicates the number of available resources of
each type
• Allocation - An n × m matrix defines the number of resources of each type
currently allocated to each process
• Request - An n × m matrix indicates the current request of each process. If
Request[i][j] equals k, then process Pi is requesting k more instances of resource
type Rj
• Algorithm requires an order of O(m x n2) operations to detect whether the system is
in deadlocked state
6](https://image.slidesharecdn.com/deadlockspart-iii-220630060916-4a57d858/85/Deadlocks-Part-III-pdf-6-320.jpg)
![Several Instances of a Resource Type - Deadlock Detection Algorithm
7
1. Let Work and Finish be vectors of length m and n, respectively Initialize:
(a) Work = Available
(b)For i = 1,2, …, n, if Allocationi 0, then
Finish[i] = false; otherwise, Finish[i] = true
2. Find an index i such that both:
(a)Finish[i] == false
(b) Requesti <= Work
If no such i exists, go to step 4
3. Work = Work + Allocationi
Finish[i] = true
go to step 2
4. If Finish[i] == false, for some i, 0<= i <=n, then the system is in deadlock state.
Moreover, if Finish[i] == false, then Pi is deadlocked](https://image.slidesharecdn.com/deadlockspart-iii-220630060916-4a57d858/85/Deadlocks-Part-III-pdf-7-320.jpg)
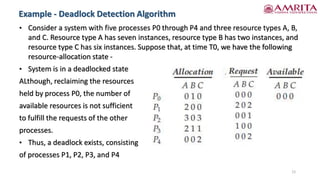
![Example - Deadlock Detection Algorithm
8
• Consider a system with five processes P0 through P4 and three resource types A, B,
and C. Resource type A has seven instances, resource type B has two instances, and
resource type C has six instances. Suppose that, at time T0, we have the following
resource-allocation state -
• System is not in a deadlocked state
Indeed, if we execute our algorithm,
we will find that the sequence
<P0, P2, P3, P1, P4> results in
Finish[i] == true for all i](https://image.slidesharecdn.com/deadlockspart-iii-220630060916-4a57d858/85/Deadlocks-Part-III-pdf-8-320.jpg)
![• A= 7-7=0
• B=2-2=0
• C=6-6=0
• P0
Request<=work
0 0 0 <= 0 0 0 true
Work=work+allocation 0 0 0+0 1 0= 0 1 0 finish[0]=true
P0-false P1-false P2-false P3-false P4-false
0- true
9](https://image.slidesharecdn.com/deadlockspart-iii-220630060916-4a57d858/85/Deadlocks-Part-III-pdf-9-320.jpg)
![• P1
Request <=work
2 0 2 <= 0 1 0 false p1 has to wait
• P2
Request <=work
0 0 0 <= 0 1 0 true
work=work+allocation 0 1 0 + 3 0 3=3 1 3 finish[2]=true
• P3
Request <=work
1 0 0 <= 3 1 3 true
Work= work +allocation 3 1 3 + 2 1 1= 5 2 4 finish [3]= true
• P4
Request <=work
0 0 2 < = 5 2 4 true
Work=work+ allocation 5 2 4 + 0 0 2= 5 2 6 finish[4]=true
10](https://image.slidesharecdn.com/deadlockspart-iii-220630060916-4a57d858/85/Deadlocks-Part-III-pdf-10-320.jpg)