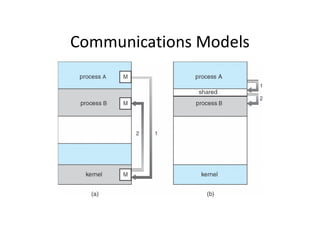
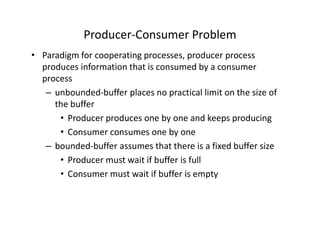
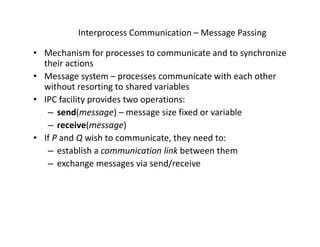
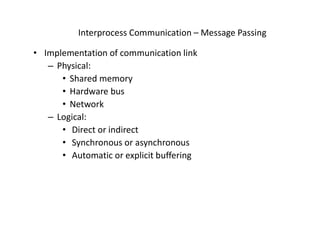
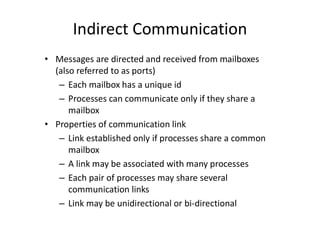
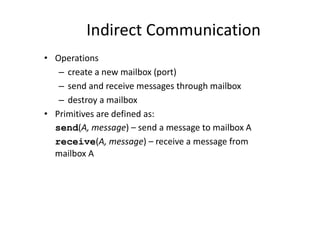
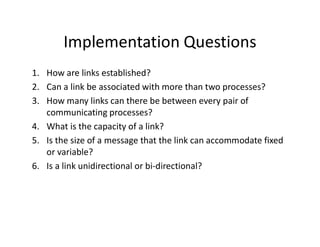
Processes can be independent or cooperating. Cooperating processes use interprocess communication (IPC) to share information and resources. There are two main IPC models: shared memory, where processes access a shared buffer, and message passing, where processes send and receive messages. The producer-consumer problem is a paradigm for cooperating processes where a producer process generates information for a consumer process to use. In message passing IPC, processes establish communication links and exchange messages using send and receive operations, while in shared memory IPC processes access shared data in a buffer.


![Bounded-Buffer –
Shared-Memory Solution
Shared data
#define BUFFER_SIZE 10
typedef struct {
. . .
} item;
item buffer[BUFFER_SIZE];
int in = 0;
int out = 0;](https://image.slidesharecdn.com/interprocess-communication-231010175429-2f12748f/85/interprocess-communication-pdf-7-320.jpg)
![Bounded-Buffer – Producer
while (true) {
/* Produce an item */
while (((in = (in + 1) % BUFFER SIZE) == out)
; /* do nothing -- no free buffers */
buffer[in] = item;
in = (in + 1) % BUFFER SIZE;
}](https://image.slidesharecdn.com/interprocess-communication-231010175429-2f12748f/85/interprocess-communication-pdf-8-320.jpg)
![Bounded Buffer – Consumer
while (true) {
while (in == out)
; // do nothing -- nothing to consume
// remove an item from the buffer
item = buffer[out];
out = (out + 1) % BUFFER SIZE;
return item;
}](https://image.slidesharecdn.com/interprocess-communication-231010175429-2f12748f/85/interprocess-communication-pdf-9-320.jpg)








































![[Deck] What's New in Spark-Iceberg Integration via DSV2.pptx](https://cdn.slidesharecdn.com/ss_thumbnails/deckwhatsnewinspark-icebergintegrationviadsv2-260210005337-25955b12-thumbnail.jpg?width=640&height=640&fit=bounds)


