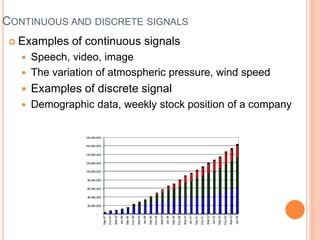
Downloaded 97 times
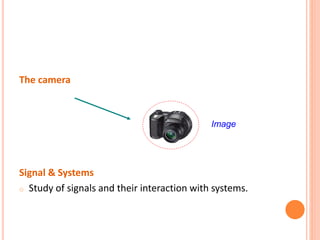

![DISCRETE TIME SIGNAL
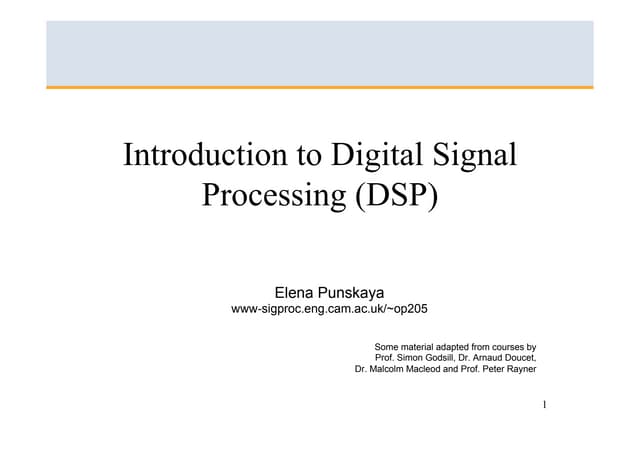
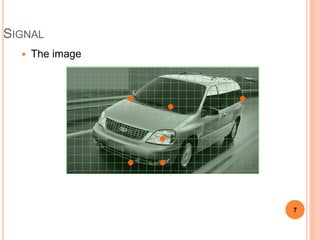
• Defined on discrete instant of time.
• Independent variable is enclosed in brackets [.]
• Denoted by x[n]
• Discrete signal is obtained by taking samples of analog
signal at discrete instant of time.
X[1]
n0 1 2 3 4-1-2-3-4
X[n]
X[2]
X[-1]](https://image.slidesharecdn.com/1stlecture-190326065148/85/Lecture-No-1-Signals-Systems-16-320.jpg)
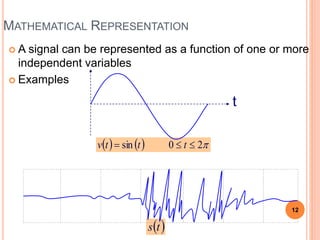
![REPRESENTATION OF DISCRETE TIME
SIGNALS
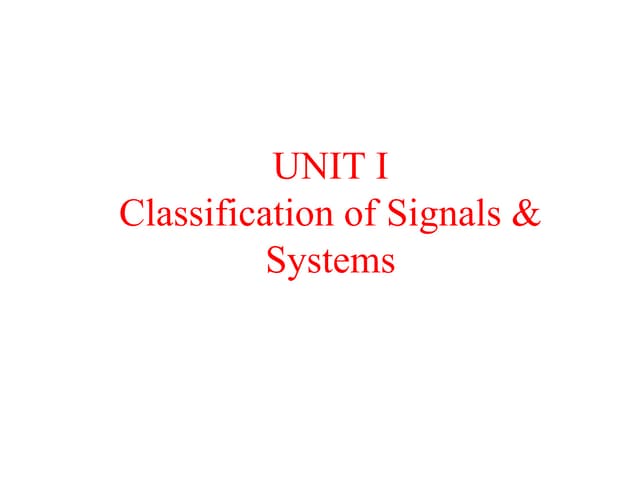
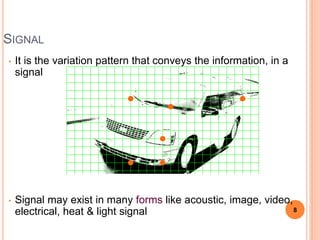
Fours ways for representing discrete time signals.
Graphical representation of signal
Consider a signal x[n] having values
x[-2]=-4,x[-1]=1,X[0]=2, x[1]=1,x[2]=2
X[1]
n0 1 2-1-2
X[n] X[2]
X[-1]](https://image.slidesharecdn.com/1stlecture-190326065148/85/Lecture-No-1-Signals-Systems-19-320.jpg)
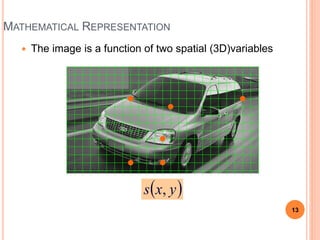
![FUNCTIONAL REPRESENTATION OF DISCRETE
SIGNALS
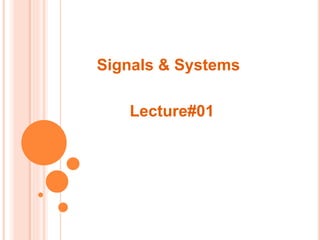
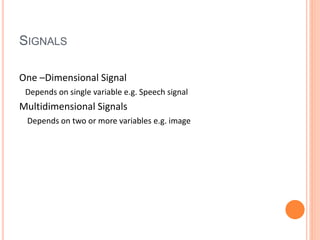
Signals can be represented using functional
representation as:
x[n]= -4 for n= -2
1 for n=-1
2 for n=0
1 for n=1
2 for n=2
Tabular representation of discrete signals
• In this method, sampling instant n and the magnitude of
signal at the sampling instant are represented in tabular
form.
n -2 -1 0 1 2
X[n] -4 1 2 1 2](https://image.slidesharecdn.com/1stlecture-190326065148/85/Lecture-No-1-Signals-Systems-20-320.jpg)
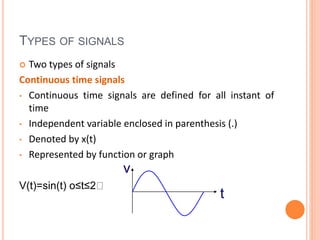
![SEQUENCE REPRESENTATION OF DISCRETE
SIGNALS
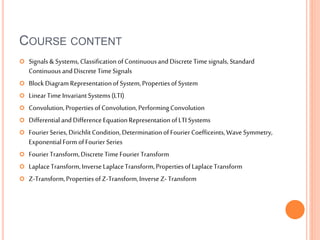
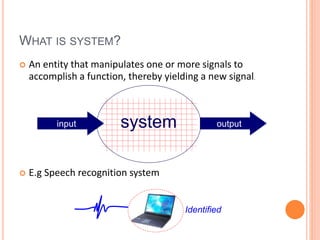
A finite duration sequence can be represented as:
x[n]= { 2, -4, 3, 0, 1, 3, 2 }
o The arrow denotes n=0 term.
o When no arrow is indicated then first term indicates the n=0 term.
x[n]= { 2, 4, 3, 1, 5 }](https://image.slidesharecdn.com/1stlecture-190326065148/85/Lecture-No-1-Signals-Systems-21-320.jpg)

The document outlines the course content for a signals and systems lecture, covering fundamental concepts including classifications of continuous and discrete time signals, system properties, and various transforms (Fourier, Laplace, Z-transform). It also explains signals as functions that convey information, alongside the categorization of signals into continuous and discrete types with examples. The document provides representations of discrete time signals in graphical, functional, tabular, and sequence forms.