Signals can be classified as continuous-time or discrete-time. Continuous-time signals have a value for all points in time, while discrete-time signals have values only at specific sample points. Common elementary signals include unit step, unit impulse, sinusoidal, and exponential functions. Signals can be further classified based on properties like periodicity, even/odd symmetry, and energy/power. Operations like time shifting, scaling, and inversion can be performed on signals. Discrete-time signals are often obtained by sampling continuous-time signals.
![4
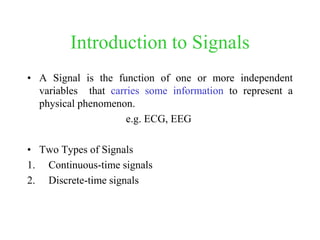
2. Discrete-Time Signals
• Signal that has a value for only specific points in time
• Typically formed by “sampling” a continuous-time signal
– Taking the value of the original waveform at specific intervals in time
• Function of the sample value, n
– Write as x[n]
– Often called a sequence
• Commonly found in the digital world
– ex. wav file or mp3
• Displayed graphically as individual values
– Called a “stem” plot
x[n]
n1 2 3 4 5 6 7 8 9 10
Sample number](https://image.slidesharecdn.com/classification-of-signals-systems-ppt-200704031334/85/Classification-of-signals-systems-ppt-4-320.jpg)
![5
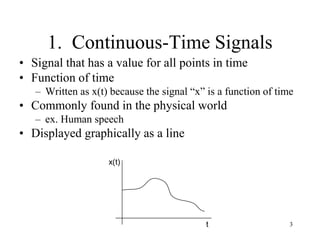
Examples: CT vs. DT Signals
( )x t [ ]x n
nt](https://image.slidesharecdn.com/classification-of-signals-systems-ppt-200704031334/85/Classification-of-signals-systems-ppt-5-320.jpg)
![6
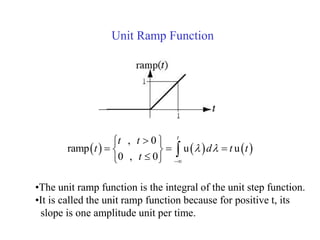
• Discrete-time signals are often obtained by
sampling continuous-time signals
Sampling
( )x t [ ] ( ) ( )t nTx n x t x nT . .](https://image.slidesharecdn.com/classification-of-signals-systems-ppt-200704031334/85/Classification-of-signals-systems-ppt-6-320.jpg)





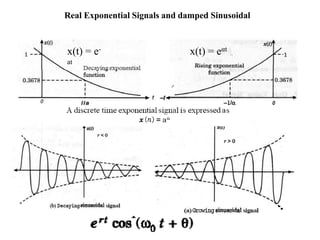
![Sinusoidal & Exponential Signals Contd.
x(t) = A sin (2Пfot+ θ)
= A sin (ωot+ θ)
x(t) = Aeat Real Exponential
= Aejω̥t = A[cos (ωot) +j sin (ωot)] Complex Exponential
θ = Phase of sinusoidal wave
A = amplitude of a sinusoidal or exponential signal
fo = fundamental cyclic frequency of sinusoidal signal
ωo = radian frequency
Sinusoidal signal](https://image.slidesharecdn.com/classification-of-signals-systems-ppt-200704031334/85/Classification-of-signals-systems-ppt-14-320.jpg)



![Discrete-Time Signals
• Sampling is the acquisition of the values of a
continuous-time signal at discrete points in time
• x(t) is a continuous-time signal, x[n] is a discrete-
time signal
x x where is the time between sampless sn nT T](https://image.slidesharecdn.com/classification-of-signals-systems-ppt-200704031334/85/Classification-of-signals-systems-ppt-20-320.jpg)
![Discrete Time Exponential and
Sinusoidal Signals
• DT signals can be defined in a manner analogous to their
continuous-time counter part
x[n] = A sin (2Пn/No+θ)
= A sin (2ПFon+ θ)
x[n] = an
n = the discrete time
A = amplitude
θ = phase shifting radians,
No = Discrete Period of the wave
1/N0 = Fo = Ωo/2 П = Discrete Frequency
Discrete Time Sinusoidal Signal
Discrete Time Exponential Signal](https://image.slidesharecdn.com/classification-of-signals-systems-ppt-200704031334/85/Classification-of-signals-systems-ppt-21-320.jpg)



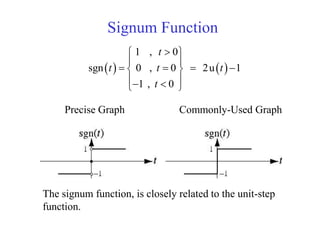
![Unit Pulse Sequence Contd.
• The discrete-time unit impulse is a function in the
ordinary sense in contrast with the continuous-
time unit impulse.
• It has a sampling property.
• It has no scaling property i.e.
δ[n]= δ[an] for any non-zero finite integer ‘a’](https://image.slidesharecdn.com/classification-of-signals-systems-ppt-200704031334/85/Classification-of-signals-systems-ppt-26-320.jpg)









![Periodic and Non-periodic Signals
• Given x(t) is a continuous-time signal
• x (t) is periodic iff x(t) = x(t+Tₒ) for any T and any integer n
• Example
– x(t) = A cos(wt)
– x(t+Tₒ) = A cos[wt+Tₒ)] = A cos(wt+wTₒ)= A cos(wt+2)
= A cos(wt)
– Note: Tₒ =1/fₒ ; w2fₒ](https://image.slidesharecdn.com/classification-of-signals-systems-ppt-200704031334/85/Classification-of-signals-systems-ppt-40-320.jpg)










![Signal Energy and Power for DT
Signal
•The signal energy of a for a discrete time signal x[n] is
2
x x
n
E n
•A discrtet time signal with finite energy and zero
power is called Energy Signal i.e.for energy signal
0<E<∞ and P =0](https://image.slidesharecdn.com/classification-of-signals-systems-ppt-200704031334/85/Classification-of-signals-systems-ppt-59-320.jpg)
![Signal Energy and Power for DT
Signal Contd.
The average signal power of a discrete time power signal
x[n] is
1
2
x
1
lim x
2
N
N
n N
P n
N
2
x
1
x
n N
P n
N
For a periodic signal x[n] the average signal power is
The notation means the sum over any set of
consecutive 's exactly in length.
n N
n N
](https://image.slidesharecdn.com/classification-of-signals-systems-ppt-200704031334/85/Classification-of-signals-systems-ppt-60-320.jpg)


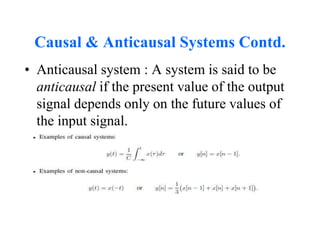
![Causal & Anticausal Systems
• Causal system : A system is said to be causal if
the present value of the output signal depends only
on the present and/or past values of the input
signal.
• Example: y[n]=x[n]+1/2x[n-1]](https://image.slidesharecdn.com/classification-of-signals-systems-ppt-200704031334/85/Classification-of-signals-systems-ppt-64-320.jpg)

![Stable & Unstable Systems Contd.
Example
- y[n]=1/3(x[n]+x[n-1]+x[n-2])
1
[ ] [ ] [ 1] [ 2]
3
1
(| [ ]| | [ 1]| | [ 2]|)
3
1
( )
3
x x x x
y n x n x n x n
x n x n x n
M M M M
](https://image.slidesharecdn.com/classification-of-signals-systems-ppt-200704031334/85/Classification-of-signals-systems-ppt-71-320.jpg)

![Discrete-Time Systems
• A Discrete-Time System is a mathematical operation that
maps a given input sequence x[n] into an output sequence
y[n]
Example:
Moving (Running) Average
Maximum
Ideal Delay System
]}n[x{T]n[y
]3n[x]2n[x]1n[x]n[x]n[y
]2n[x],1n[x],n[xmax]n[y
]nn[x]n[y o](https://image.slidesharecdn.com/classification-of-signals-systems-ppt-200704031334/85/Classification-of-signals-systems-ppt-76-320.jpg)
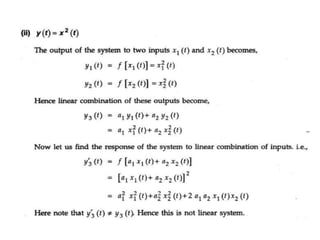
![Memoryless System
A system is memoryless if the output y[n] at every value
of n depends only on the input x[n] at the same value of n
Example :
Square
Sign
counter example:
Ideal Delay System
2
]n[x]n[y
]n[xsign]n[y
]nn[x]n[y o](https://image.slidesharecdn.com/classification-of-signals-systems-ppt-200704031334/85/Classification-of-signals-systems-ppt-77-320.jpg)
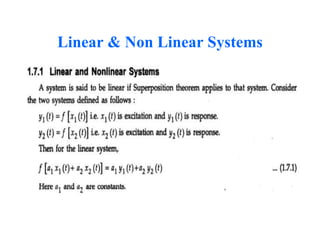
![Linear Systems
• Linear System: A system is linear if and only if
Example: Ideal Delay System
(scaling)]n[xaT]n[axT
and
y)(additivit]n[xT]n[xT]}n[x]n[x{T 2121
]nn[x]n[y o
]nn[ax]n[xaT
]nn[ax]n[axT
]nn[x]nn[x]n[xT]}n[x{T
]nn[x]nn[x]}n[x]n[x{T
o1
o1
o2o112
o2o121
](https://image.slidesharecdn.com/classification-of-signals-systems-ppt-200704031334/85/Classification-of-signals-systems-ppt-78-320.jpg)
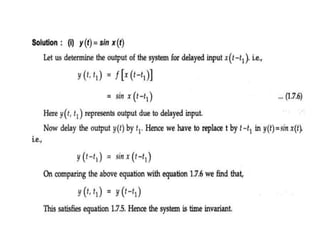
![Time-Invariant Systems
Time-Invariant (shift-invariant) Systems
A time shift at the input causes corresponding time-shift at
output
Example: Square
Counter Example: Compressor System
]nn[xT]nn[y]}n[x{T]n[y oo
2
]n[x]n[y
2
oo
2
o1
]nn[xn-nygivesoutputtheDelay
]nn[xnyisoutputtheinputtheDelay
]Mn[x]n[y
oo
o1
nnMxn-nygivesoutputtheDelay
]nMn[xnyisoutputtheinputtheDelay
](https://image.slidesharecdn.com/classification-of-signals-systems-ppt-200704031334/85/Classification-of-signals-systems-ppt-79-320.jpg)
![Causal System
A system is causal iff it’s output is a function of only the
current and previous samples
Examples: Backward Difference
Counter Example: Forward Difference
]n[x]1n[x]n[y
]1n[x]n[x]n[y ](https://image.slidesharecdn.com/classification-of-signals-systems-ppt-200704031334/85/Classification-of-signals-systems-ppt-80-320.jpg)
![Stable System
Stability (in the sense of bounded-input bounded-output
BIBO). A system is stable iff every bounded input produces
a bounded output
Example: Square
Counter Example: Log
yx B]n[yB]n[x
2
]n[x]n[y
2
x
x
B]n[ybyboundedisoutput
B]n[xbyboundedisinputif
]n[xlog]n[y 10
nxlog0y0nxforboundednotoutput
B]n[xbyboundedisinputifeven
10
x](https://image.slidesharecdn.com/classification-of-signals-systems-ppt-200704031334/85/Classification-of-signals-systems-ppt-81-320.jpg)