More Related Content

PDF

PDF
深層学習によるHuman Pose Estimationの基礎 ![[DL輪読会]NeRF: Representing Scenes as Neural Radiance Fields for View Synthesis](https://cdn.slidesharecdn.com/ss_thumbnails/nerfdlseminar1-200327021512-thumbnail.jpg?width=640&height=640&fit=bounds)
PDF
[DL輪読会]NeRF: Representing Scenes as Neural Radiance Fields for View Synthesis ![[DL輪読会]Neural Radiance Flow for 4D View Synthesis and Video Processing (NeRF...](https://cdn.slidesharecdn.com/ss_thumbnails/20210806journalclub-210806023711-thumbnail.jpg?width=640&height=640&fit=bounds)
PDF
[DL輪読会]Neural Radiance Flow for 4D View Synthesis and Video Processing (NeRF... 
PDF

PDF

PPTX

PPTX
【DL輪読会】EPro-PnP: Generalized End-to-End Probabilistic Perspective-n-Pointsfor... What's hot
![[解説スライド] NeRF: Representing Scenes as Neural Radiance Fields for View Synthesis](https://cdn.slidesharecdn.com/ss_thumbnails/nerf20200327slideshare-200326131430-thumbnail.jpg?width=640&height=640&fit=bounds)
PPTX
[解説スライド] NeRF: Representing Scenes as Neural Radiance Fields for View Synthesis 
PPTX

PDF

PDF
2018/12/28 LiDARで取得した道路上点群に対するsemantic segmentation 
PDF

PDF

PPTX
Tensor コアを使った PyTorch の高速化 
PPTX

PDF

PDF
3次元レジストレーション(PCLデモとコード付き) ![[第2回3D勉強会 研究紹介] Neural 3D Mesh Renderer (CVPR 2018)](https://cdn.slidesharecdn.com/ss_thumbnails/201807263dv-180728060959-thumbnail.jpg?width=640&height=640&fit=bounds)
PDF
[第2回3D勉強会 研究紹介] Neural 3D Mesh Renderer (CVPR 2018) 
PDF
SSII2018TS: 3D物体検出とロボットビジョンへの応用 
PDF

PPTX
物体検出の歴史(R-CNNからSSD・YOLOまで) 
PDF

PDF

PPTX
近年のHierarchical Vision Transformer 
PDF
ゼロから始める深層強化学習(NLP2018講演資料)/ Introduction of Deep Reinforcement Learning ![SSII2022 [SS1] ニューラル3D表現の最新動向〜 ニューラルネットでなんでも表せる?? 〜](https://cdn.slidesharecdn.com/ss_thumbnails/ss1ssii2022hkatoneural3drepresentationhiroharukato-220607054619-fadc6480-thumbnail.jpg?width=640&height=640&fit=bounds)
PDF
SSII2022 [SS1] ニューラル3D表現の最新動向〜 ニューラルネットでなんでも表せる?? 〜 
PDF
三次元点群を取り扱うニューラルネットワークのサーベイ Similar to 複数台のKinectV2の使い方

PDF
はじめてのKinect for windows v2 
PDF

PPT

PDF
第2回名古屋CV・PRML勉強会 「Kinectの導入」 
PDF
Kinect for windows sdk introduction 
PDF
Introduction to Kinect vNext 
PDF
Kinect for Windows v2�Developer Preview入門 
PDF

PDF
devsumi2012 17-D-1 Kinectで創る10年後のカタチ 
PDF
Kinect v2を通してMicrosoft技術を考える 
PDF

PPTX
More from Norishige Fukushima

PPTX

PPTX
計算スケジューリングの効果~もし,Halideがなかったら?~ 
PPTX

PDF
計算機アーキテクチャを考慮した高能率画像処理プログラミング 
PPTX

PPTX

PPTX
画像処理ライブラリ OpenCV で 出来ること・出来ないこと 
PPTX

PPTX
Comparison between Blur Transfer and Blur Re-Generation in Depth Image Based ... 
PPTX
Non-essentiality of Correlation between �Image and Depth Map in Free Viewpoin... 
PDF

PDF

PDF

PDF

PDF

PDF

PDF

PDF
組み込み関数(intrinsic)によるSIMD入門 複数台のKinectV2の使い方
- 1.
- 2.
- 3.
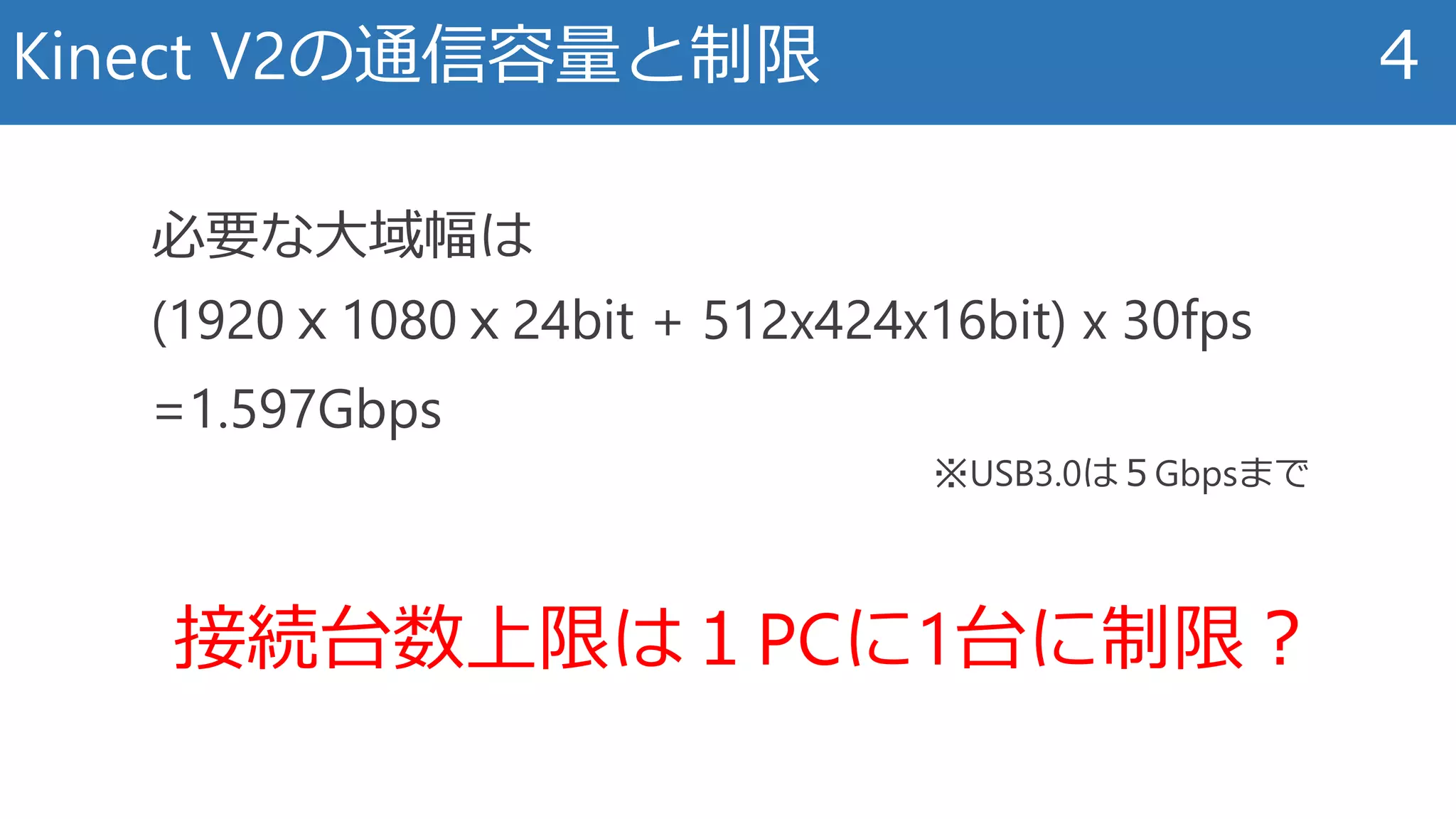
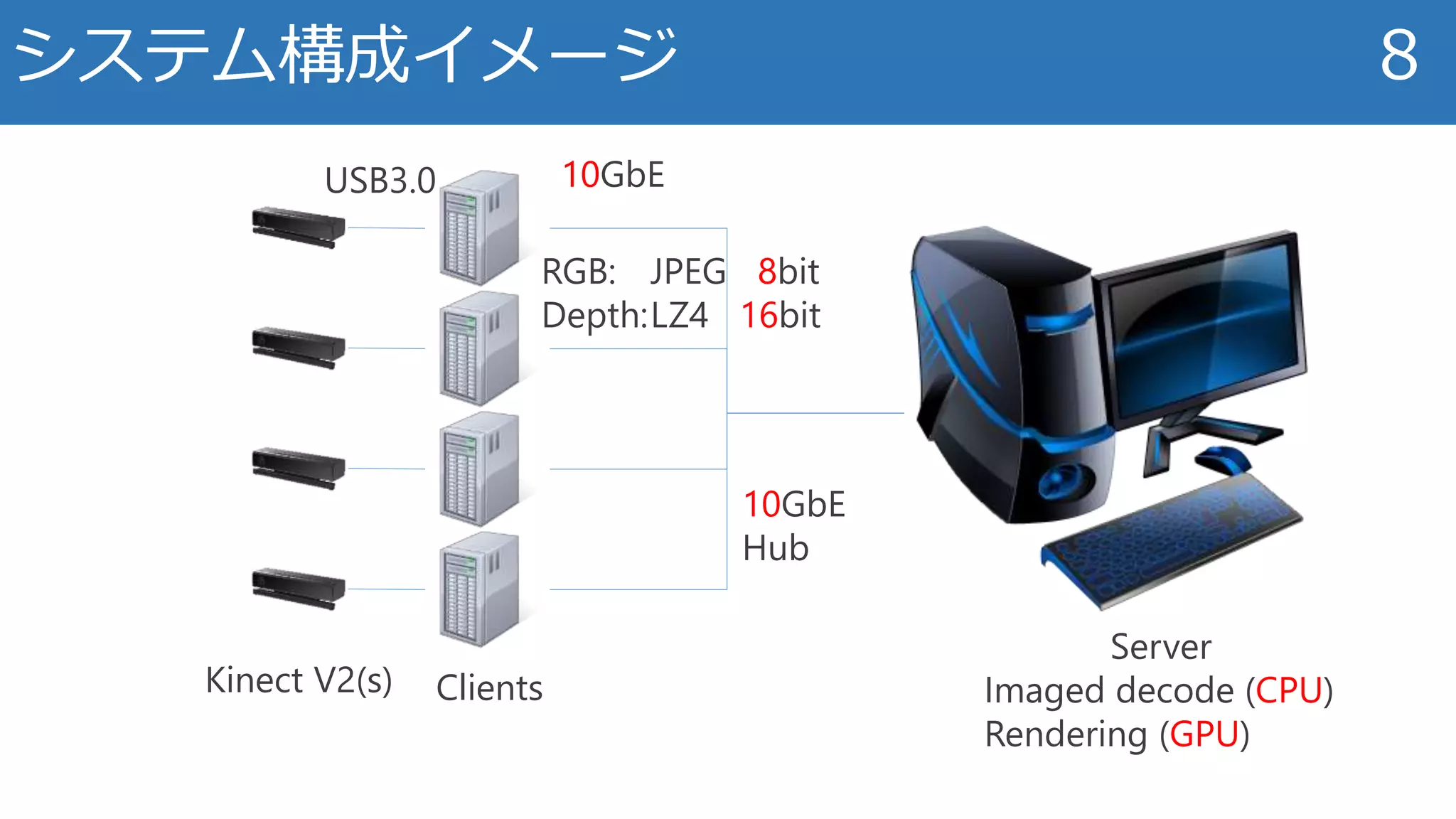
Kinect V2 3
RGB 1920x1080
Depth 512x424
FPS 30
接続端子 USB3.0
TOF形式の安価なデプスセンサー
- 4.
- 5.
- 6.
- 7.
- 8.
- 9.
- 10.
- 11.
- 12.
- 13.
- 14.
- 15.
- 16.
- 17.
- 18.
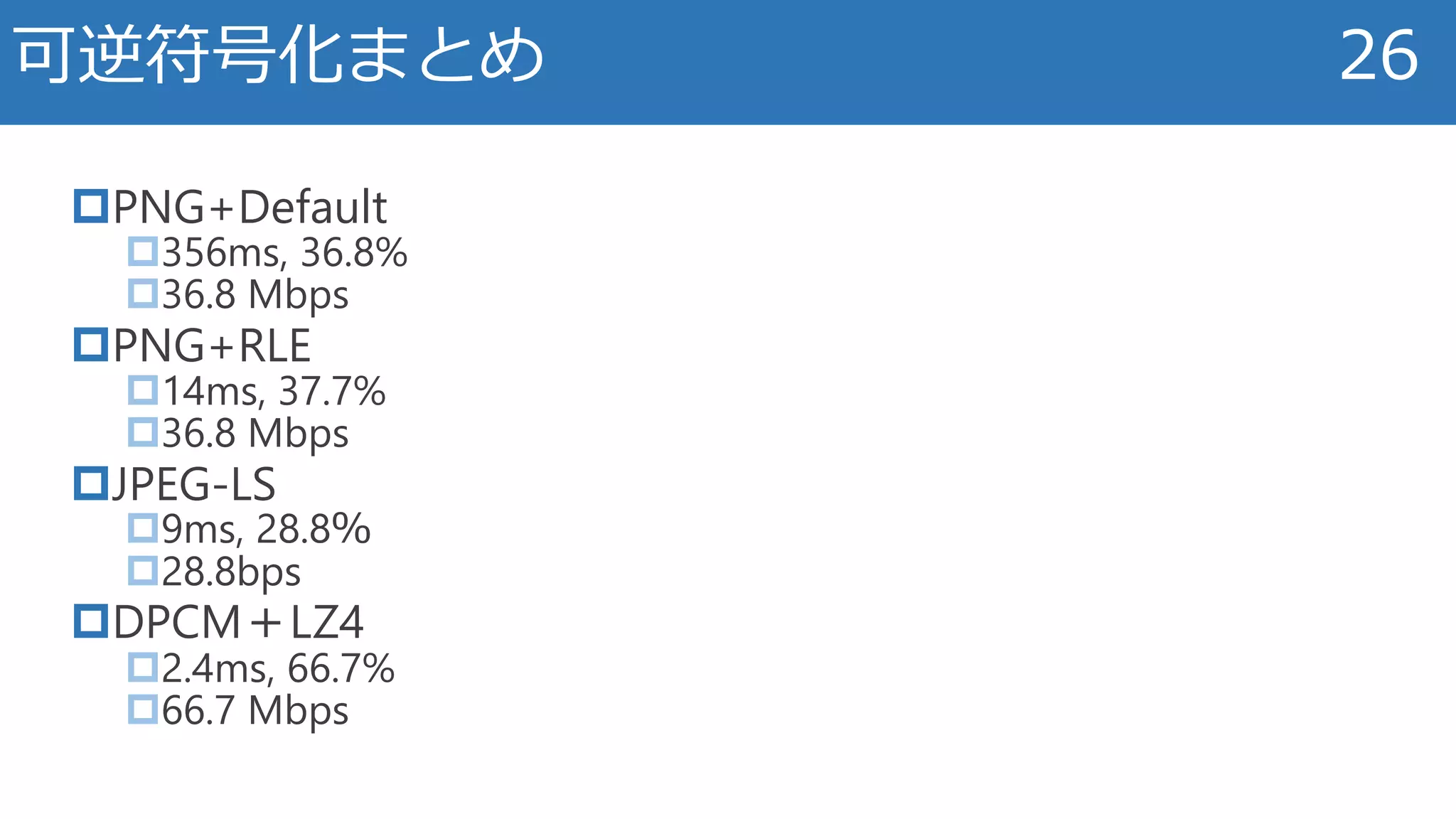
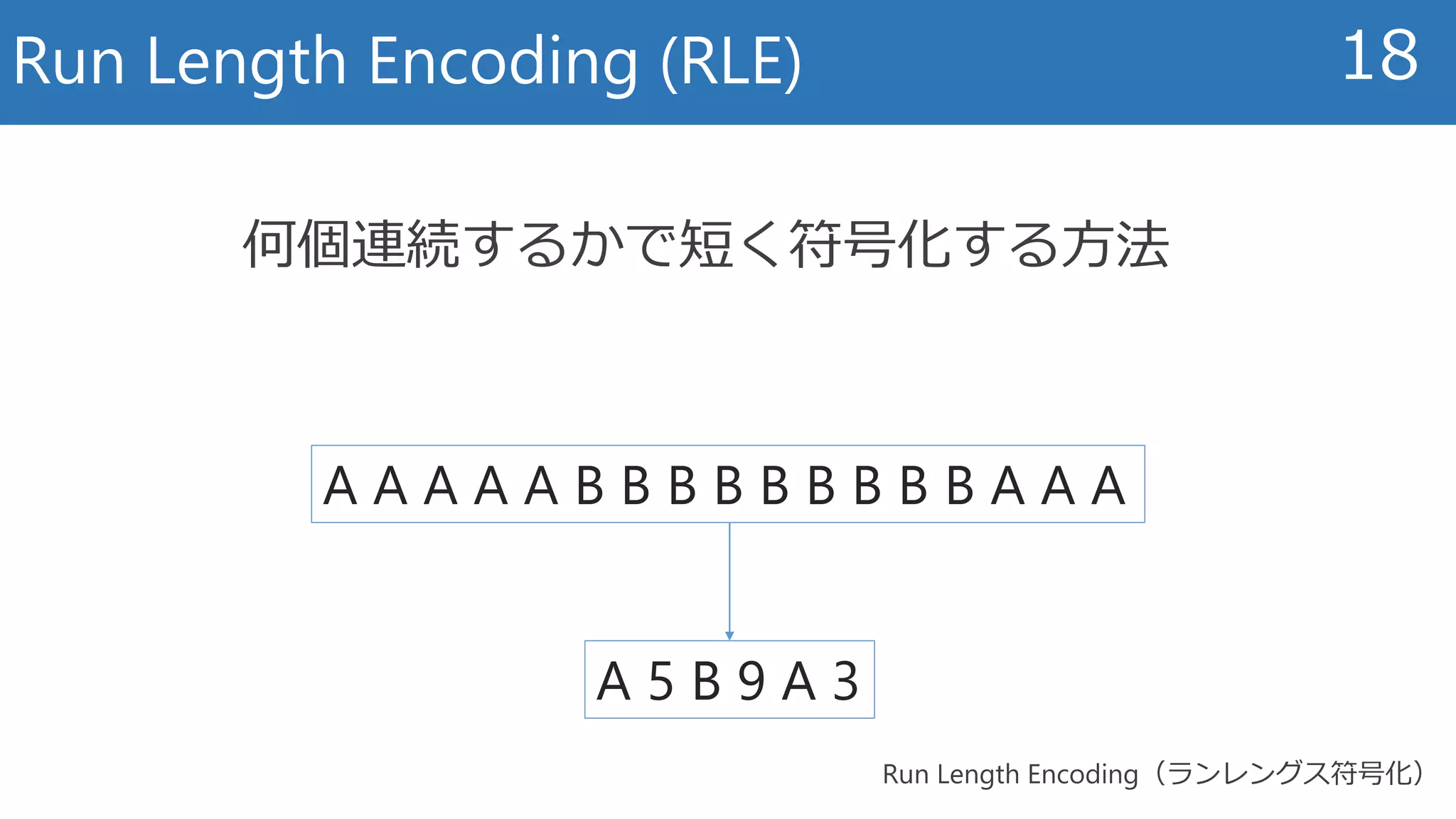
Run Length Encoding(RLE) 18
A A A A A B B B B B B B B B A A A
A 5 B 9 A 3
何個連続するかで短く符号化する方法
Run Length Encoding(ランレングス符号化)
- 19.
- 20.
RLE の派生 20
Zero RLE:ゼロが何個連続するかで符号化
ゼロに集中する変換を施し,ゼロの符号長だけ短く
することで高い符号化効率を達成可能
Switched RLE:RLEを使うかどうかを切り替える
0が続かないときに得をする方法
- 21.
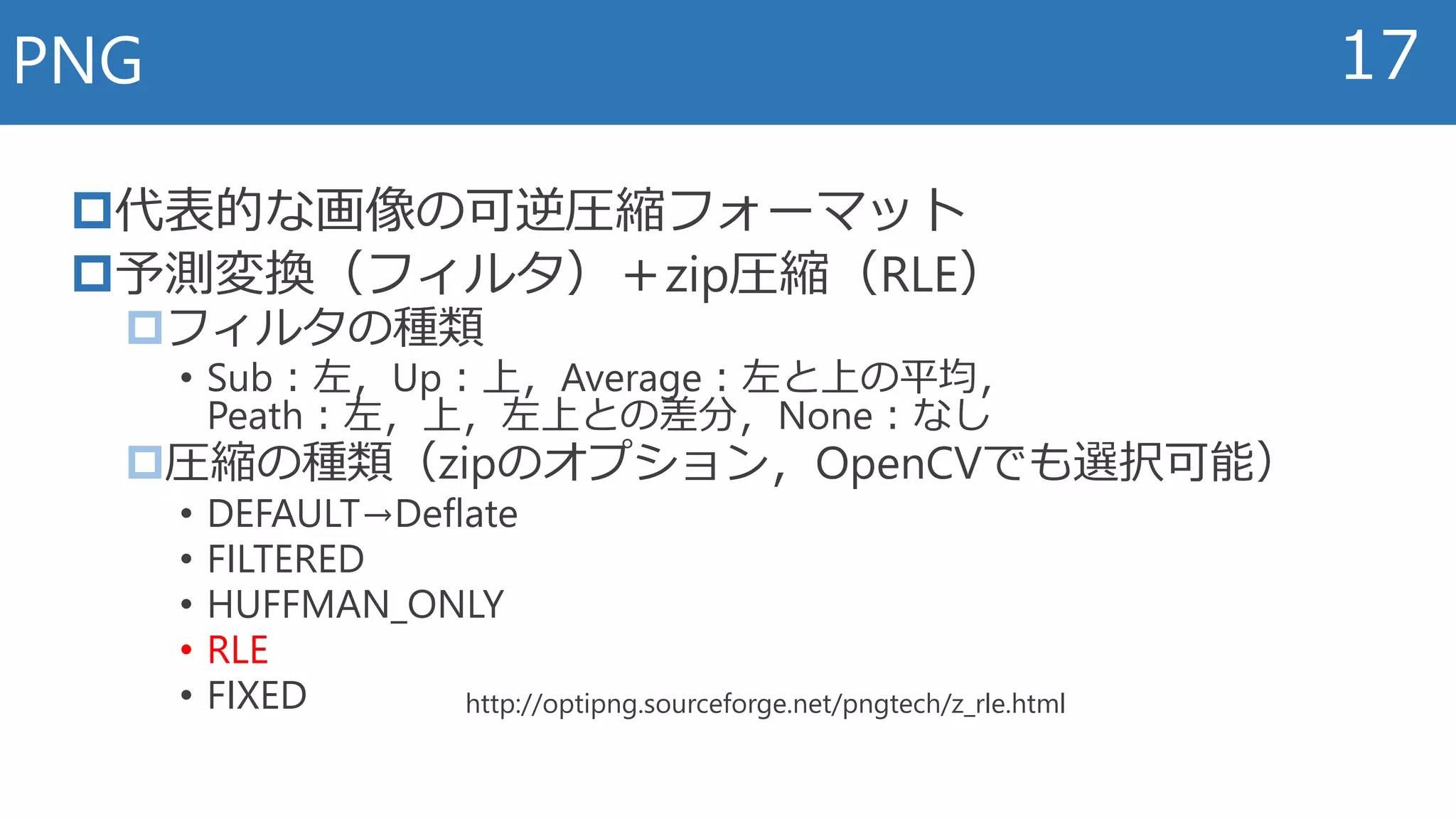
OpenCVによる詳しいpng圧縮 21
void encodePNG(InputArraysrc, vector<uchar> buff)
{
vector<int> param(4);
param[0]=IMWRITE_PNG_COMPRESSION;
param[1]=9;//1-9
param[2]=IMWRITE_PNG_STRATEGY;
//DEFAULT, FILTERED, HUFFMAN_ONLY, FIXED
param[3]=IMWRITE_PNG_STRATEGY_RLE;
imencode(".png", src, buff, param);
}
- 22.
- 23.
- 24.
- 25.
LZ4 -Extremely fastcompression- 25
https://code.google.com/p/lz4/
極限まで高速な可逆圧縮符号化方式
zipよりも圧縮効率が少し悪いが,とにかく速い
DPCM(前方予測)と組み合わせることで
かなり高速な符号化が可能
- 26.
- 27.
- 28.
- 29.
- 30.
- 31.
- 32.
- 33.
- 34.
- 35.
- 36.
- 37.
- 38.
- 39.
- 40.
- 41.
- 42.
- 43.
- 44.
- 45.
- 46.
- 47.
- 48.
- 49.
- 50.
- 51.
- 52.


![OpenCVによる詳しいpng圧縮 21
void encodePNG(InputArray src, vector<uchar> buff)
{
vector<int> param(4);
param[0]=IMWRITE_PNG_COMPRESSION;
param[1]=9;//1-9
param[2]=IMWRITE_PNG_STRATEGY;
//DEFAULT, FILTERED, HUFFMAN_ONLY, FIXED
param[3]=IMWRITE_PNG_STRATEGY_RLE;
imencode(".png", src, buff, param);
}](https://image.slidesharecdn.com/multikinectv2-150320212051-conversion-gate01/75/KinectV2-21-2048.jpg)