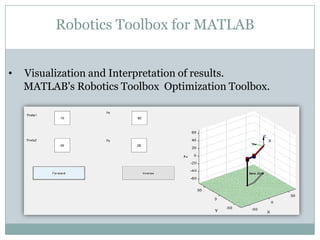
The document presents a methodology for the inverse kinematics (IK) analysis of serial manipulators using genetic algorithms, aimed at providing an efficient solution as the complexity of IK increases with degrees of freedom. It discusses essential kinematic principles, genetic algorithms, and a literature review on various soft computing techniques, emphasizing the advantages of nature-inspired optimization methods. The methodology includes using MATLAB's robotics toolbox for visualization and achieving positioning accuracy by minimizing discrepancies between actual and desired poses.


![Robot Kinematics Terminology
Homogeneous Transformation Matrix (HTM)
0Tn = 0A1 * 1A2 * 2A3 .... n−1An
Forward Kinematics
ξN = Қ (qj)
Inverse Kinematics
qj = Қ-1 (ξN)
ξN = Pose of the Robot end effector.
qj = Vector of Robot joint angles.
j ϵ [1…. n].
DOF
N = 3 (r – 1) – 2p (Planar)
N = 6 (r – 1 ) – 5p (Spatial)
D-H Parameters
Joint angle θj
Revolute
joint variable
Link Offset dj
Prismatic
joint variable
Link Length aj constant
Link Twist αj constant
J-1TJ = trotz(theta_j) * transl(0,0,d_j) * transl(a_j,0,0) * trotx(alpha_j)](https://image.slidesharecdn.com/socprosatyendra-190215082342/85/Inverse-Kinematics-Using-Genetic-Algorithms-5-320.jpg)
![What is Genetic Algorithm? Why is it chosen?
• It’s a class of stochastic search
strategies modeled after evolutionary
mechanisms.
• Why use GA instead of Newton-
Raphson for minimization.
• Newton-Raphson( ̈𝑋𝑋) method is based
on the use of local information.
Genetic Algorithm
Minimize: min f(x1 x2 x3 xn)
𝒕𝒕𝒕𝒕𝒕𝒕𝒕𝒕𝒕𝒕, 𝐟𝐟𝐟𝐟𝐟𝐟𝐟𝐟, exitflag,output,population,scores = 𝒈𝒈𝒈𝒈(𝑭𝑭𝑭𝑭𝑭𝑭 𝑭𝑭𝑭𝑭𝑭𝑭𝑭𝑭_𝑭𝑭𝑭𝑭𝑭𝑭𝑭𝑭𝑭𝑭𝑭𝑭𝑭𝑭 𝑭𝑭, 𝒏𝒏𝒏𝒏𝒏𝒏𝒏𝒏𝒏𝒏, [], [], [], [], 𝑳𝑳𝑳𝑳, 𝑼𝑼𝑼𝑼, [], 𝒐𝒐𝒐𝒐𝒐𝒐𝒐𝒐);](https://image.slidesharecdn.com/socprosatyendra-190215082342/85/Inverse-Kinematics-Using-Genetic-Algorithms-6-320.jpg)
![Methodology
• Min(GA) = FK+ Known Coordinates +TSP.
• Plugin Forward Kinematics equations.
• Feed the known Coordinates [Px , Py ,Pz]
(X1,Y1)
(X2,Y2)
0
0.5
1
1.5
2
2.5
3
3.5
0 0.5 1 1.5 2 2.5 3 3.5
Euclidian Distance](https://image.slidesharecdn.com/socprosatyendra-190215082342/85/Inverse-Kinematics-Using-Genetic-Algorithms-8-320.jpg)
![Fitness(Maximize/Minimize) Function
Fitness function solves the FK equations and minimizes the
difference between the actual and desired pose resulting in
greater positioning accuracy.
2 2 2
1
( ) ( ) ( )
n
t x t y t z
j
x p y p z p
=
− + − + −∑Minimize
Subjected to angle bounds [LB,UB] θmin
θmax
Use 4-bit binary strings for range between [0 ≤ θ1 ,θ2 ≤ 90].
Accuracy =
XU – XL
(24 )– 1
=
𝟗𝟗𝟗𝟗 −𝟎𝟎
𝟏𝟏𝟏𝟏 −𝟏𝟏
= 60
Example of 2-DOF Robot ARM](https://image.slidesharecdn.com/socprosatyendra-190215082342/85/Inverse-Kinematics-Using-Genetic-Algorithms-10-320.jpg)
![Results
ABB (ASEA Brown Boveri)
Robot Type Handling
capacity(kg)
Reach(m)
IRB 1600 6kg 1.45m
P1 = [1.533;0.270;-0.4035];
P2 = [1.400;0.3512;-0.1089];
P3 = [-0.8502;1.1421;2.392];
ABB IRB 1600-6KG/1.45m Robot(6-DOF)
CAD model (MSC ADAMS)
Output Joint Angles [ degree ]0
θ1
19.01 29.00 9.00
θ2
19.21 19.21 19.21
θ3
20.22 34.04 32.0
θ4
20.01 20.01 20.01
θ5
29.99 9.01 59.01
θ6
59.01 59.01 59.01](https://image.slidesharecdn.com/socprosatyendra-190215082342/85/Inverse-Kinematics-Using-Genetic-Algorithms-11-320.jpg)