Download as PDF, PPTX

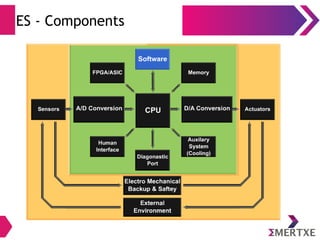
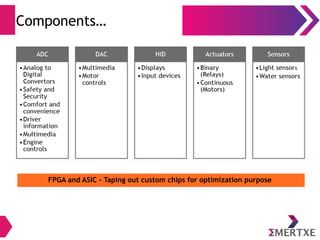

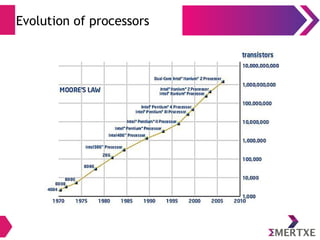
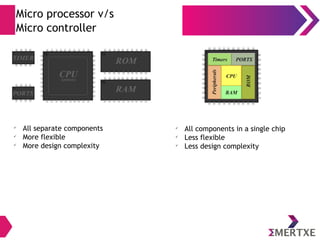
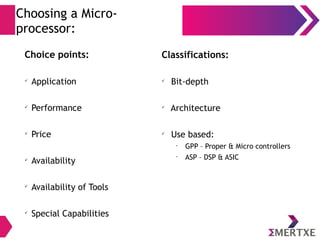



The document introduces embedded systems, discussing their classification, components, and design metrics. It highlights the differences between general-purpose and embedded systems, as well as the challenges faced in their development including interfacing and communication protocols. Key topics include processor types, memory characteristics, and the complexities involved in embedded software development environments.