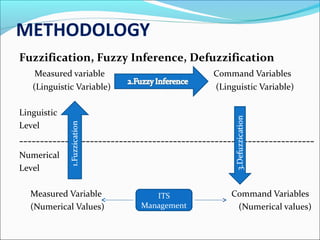
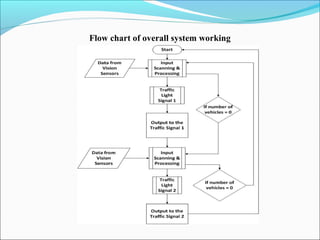
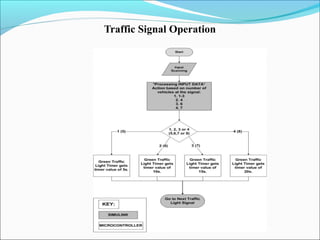
This document discusses intelligent control using fuzzy logic. It introduces fuzzy logic and its history, then describes the general approach to fuzzy logic control which involves defining inputs/outputs, membership functions, rules, and performing calculations using fuzzy inference. Applications mentioned include traffic management using a fuzzy logic controller to adjust traffic light timing based on vehicle counts at intersections. The controller uses fuzzy rules and membership functions to determine output signals to the microcontroller managing the traffic lights.










































































![谷歌留痕技术 [ 𝙩𝙤𝙥 𝟮𝟯𝟯. 𝙘 𝙤𝙢 ]](https://cdn.slidesharecdn.com/ss_thumbnails/top233-260130174328-3833018c-thumbnail.jpg?width=640&height=640&fit=bounds)









