Downloaded 1,098 times
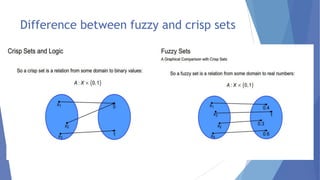


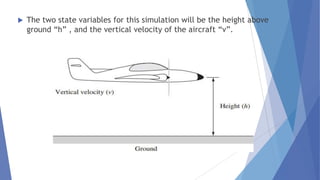
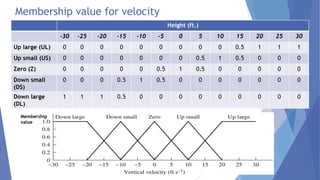
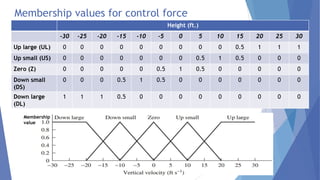
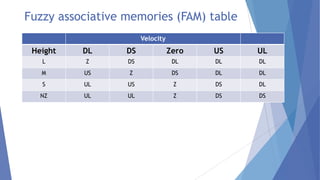
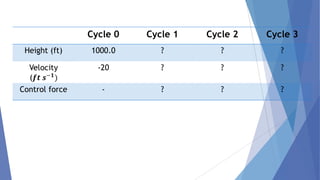
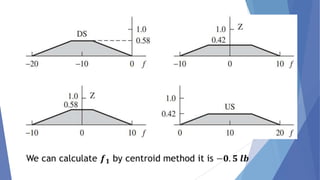
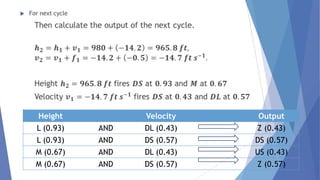
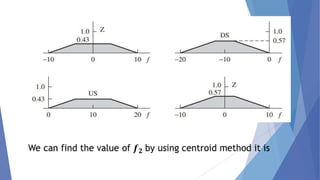

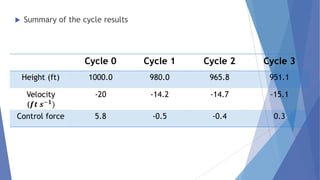


This document describes a study conducted by undergraduate students at Uva Wellassa University of Sri Lanka on applying fuzzy logic to aircraft landing control. It provides background on fuzzy logic and fuzzy set theory. It then presents the students' simulation of an aircraft's final descent and landing approach, where fuzzy logic is used to control the aircraft's vertical velocity based on its current height above ground. Over multiple cycles, the simulation demonstrates how the fuzzy logic system gradually reduces the aircraft's velocity as it gets closer to landing for a soft touchdown.






























































![5G Explained! A High Level Overview [Introduction]](https://cdn.slidesharecdn.com/ss_thumbnails/5gexplainedahighleveloverview-260119165306-cc137a3e-thumbnail.jpg?width=640&height=640&fit=bounds)
















