Download as PDF, PPTX


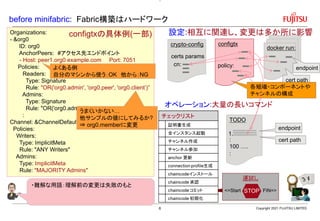
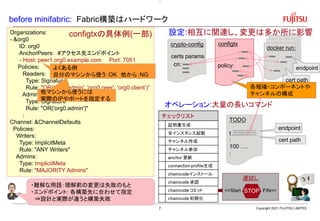
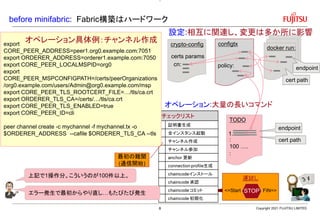


![参考) minifabric コマンドレファレンス
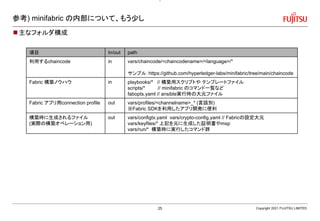
Usage: minifab <mode> [options]
Copyright 2021 FUJITSU LIMITED
option summary
-h print usage
-e flag if node endpoints should be exposed
-f output log verbosity
-i the fabric version to be used (2.1 or others)
-o organization name for org specific ops
-c channel name
-l chaincode language (go / nodejs / java )
-n chaincode name to be installed
-s the backend DB for peer (golevel or couchdb)
-b block number to be queried
-d chaincode initialization flag
-p chaincode instantiation and invocation parameters
-r flag if for chaincode processes private data
-t chaincode instantiation and invocation transient parameters
-v chaincode version to be installed
-y chaincode policy
mode summary
up all in one command for fabric setup
cleanup remove all the nodes and runtime files
imageget download docker images of fabric
generate generate certificates and genesis block
netup bring up the network only
stats list all nodes and status
create create application channel
join join all peers currently in the network to a channel
anchorupdate do channel update for all peer anchors in all orgs
profilegen generate connection profiles
install install chaincode
approve approve chaincode
commit commit chaincode for fabric>=2.0
initialize initialize chaincode for fabric >= 2.0
discover discover channel endorsement policy
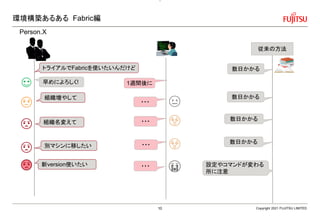
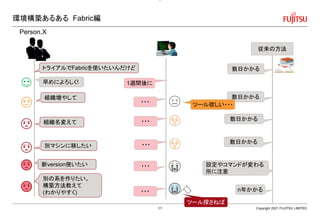
Fabric構築
step
by
step
mode(cont.) summary
apprun (experimental) run chaincode app if there is any
caliperrun (experimental) run caliper test
explorerdown shutdown Hyperledger explorer
explorerup start up Hyperledger explorer
portainerdown shutdown portainer web management
portainerup start up portainer web management
blockquery do channel block query for the channel tx
channelquery do channel query for the channel configuration
channelsign do channel config update signoff
channelupdate do channel update with a given new channel
down tear down the network
instantiate instantiate chaincode for fabric < 2.0
invoke run chaincode invoke method
nodeimport import external node certs and endpoints
orgjoin (experimental) join an org to the current channel
query run chaincode query method
ccup Update or force re-install chaincode
restart restart the network
update (experimental) update minifabric to the latest
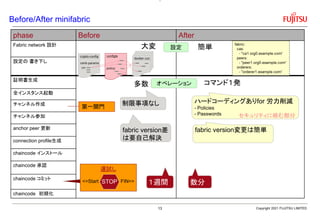
外部ツール起動
その他のオペレーション
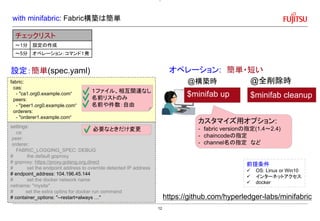
構築する環境のカスタマイズ用オプション
23](https://image.slidesharecdn.com/hyperledger-minifabric-211018084417/85/Hyperledger-Fabric-minifabric-production-minifabric-23-320.jpg)


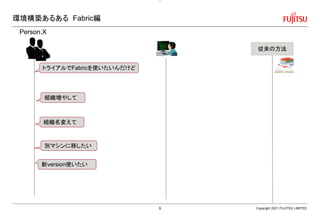
講演者:富士通株式会社 データ&セキュリティ研究所 中川 格氏 概要:minifabricは、ブロックチェーンプラットフォームの1つHyperledger Fabricの環境構築を容易にするOSSです。 ブロックチェーンを使ってみたいが環境構築が大変で敷居が高いという問題を解消するため、minifabric は簡単さと柔軟性をあわせ持つ構築ツールとして開発されています。本講演では、minifabricの基本的な使い方を紹介するとともに、本番環境構築などに向けた学習ツールとしても使えるように内部の仕組みについても紹介します。 2021年10月7日オンライン開催 Hyperledger Tokyo Meetupで講演





















![[GKE & Spanner 勉強会] Cloud Spanner の技術概要](https://cdn.slidesharecdn.com/ss_thumbnails/gke02-200121091040-thumbnail.jpg?width=640&height=640&fit=bounds)











![[CTO Night & Day 2019] Blockchain on AWS #ctonight](https://cdn.slidesharecdn.com/ss_thumbnails/ctond2019morningsessionblockchainonaws-191028200227-thumbnail.jpg?width=640&height=640&fit=bounds)

































