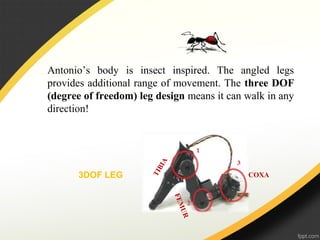
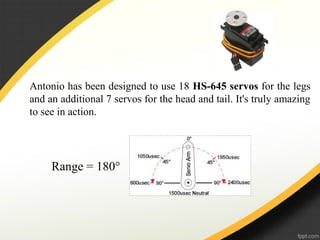
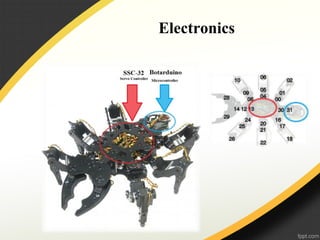
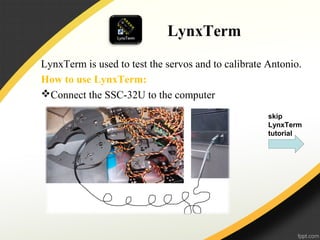
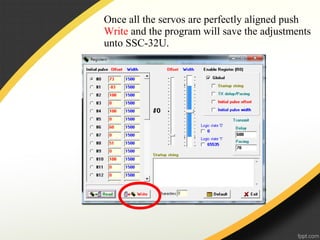
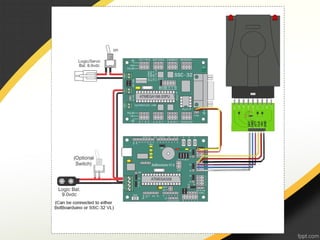
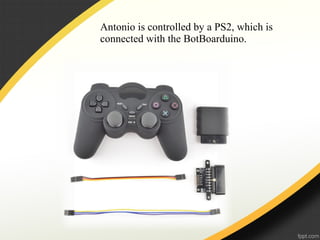
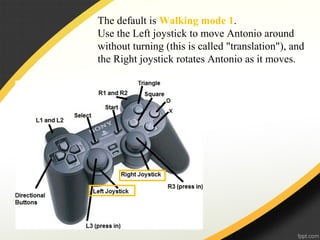
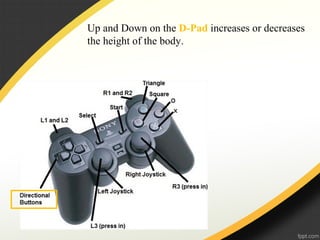
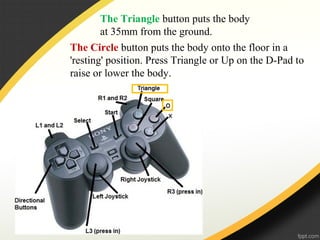
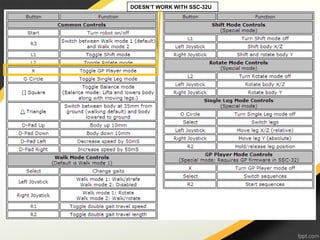
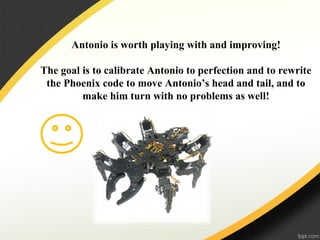
Antonio is an insect-inspired hexapod robot with 3 degrees of freedom in each of its 18 legs, allowing it to walk in any direction. It has 25 servos total - 18 for the legs and 7 for the head and tail. An SSC-32U servo controller and BotBoarduino board are used to control the servos either through LynxTerm software or an Arduino sketch uploaded to the board. The robot can be controlled using a PS2 controller for walking, adjusting body height, and special body moves, but the code needs updating to control the head and tail as well.