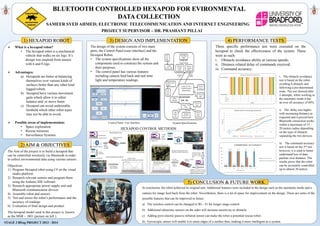
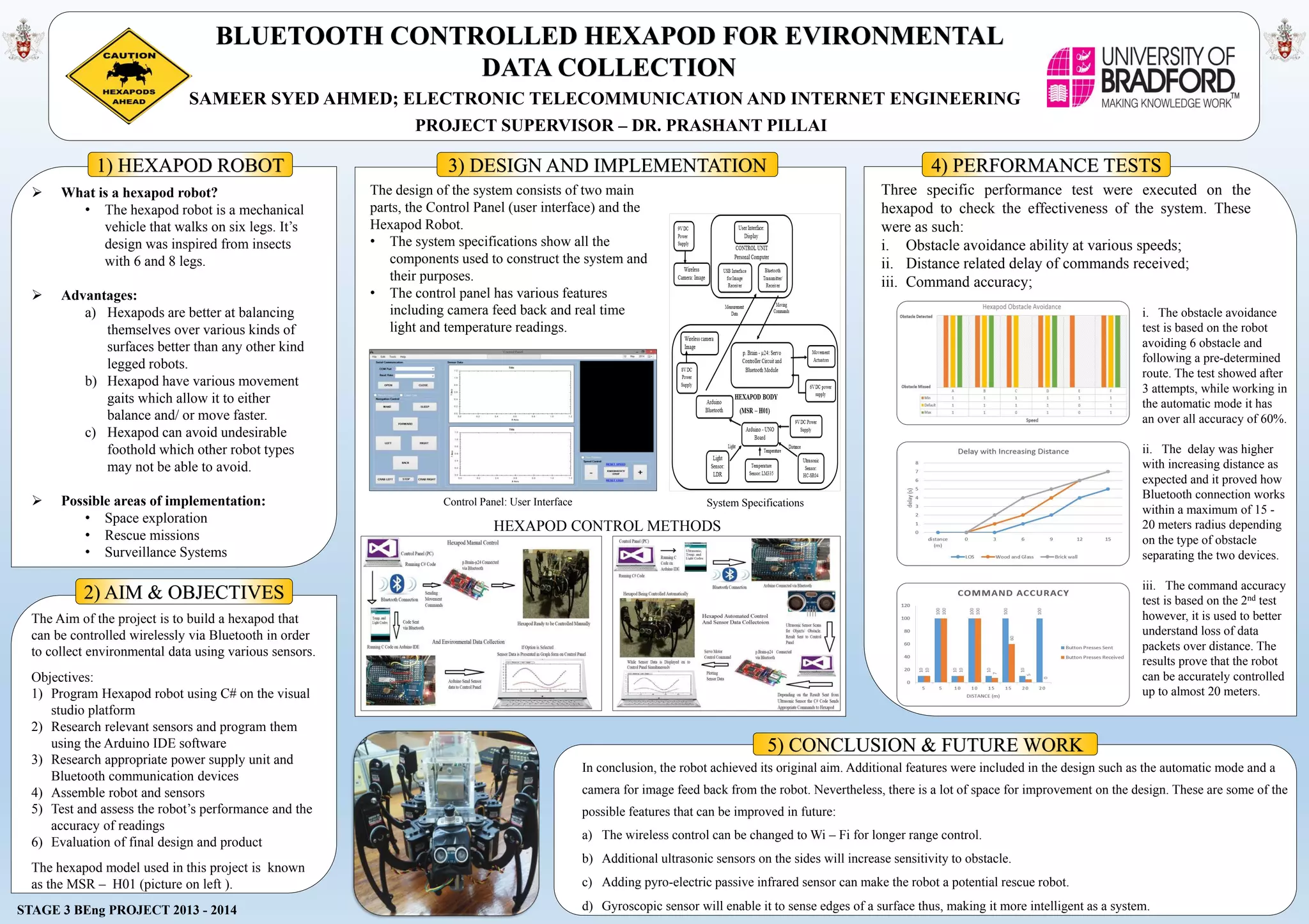
This document describes a hexapod robot project to collect environmental data wirelessly using Bluetooth. The hexapod robot design was inspired by insects and allows for stable balancing over various surfaces. It uses six legs for movement. Performance tests on the hexapod evaluated its obstacle avoidance abilities, command response times over distances, and command accuracy. The hexapod was able to avoid obstacles at 60% accuracy and be accurately controlled within 20 meters using Bluetooth. Future improvements could include adding sensors, changing to Wi-Fi control, and adding gyroscopes for more intelligent navigation.