Download to read offline




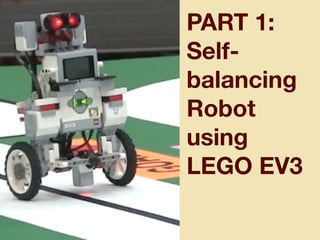
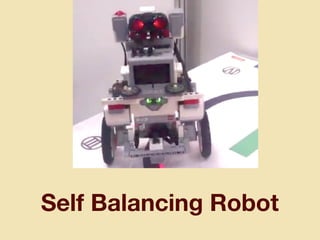


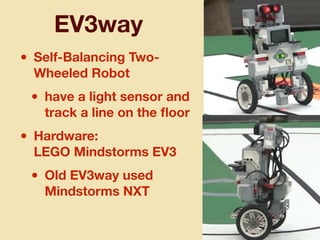






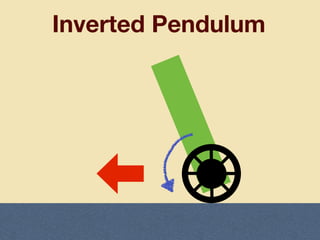
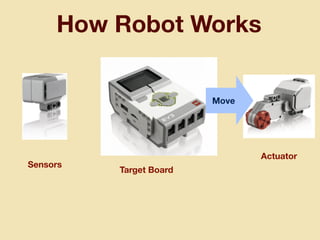
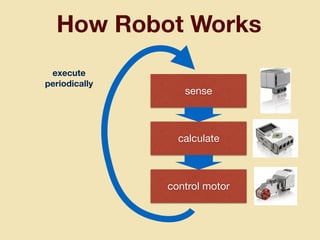
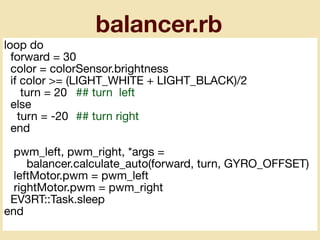
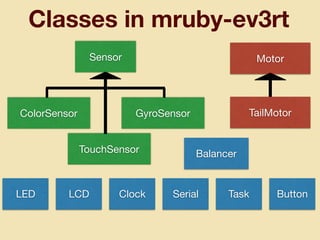
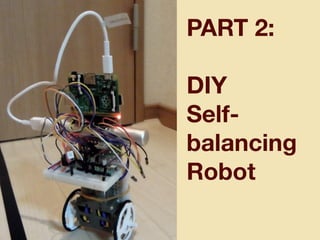

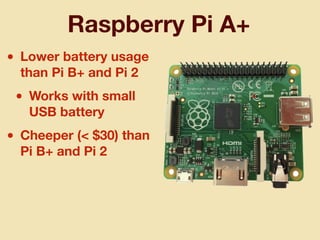
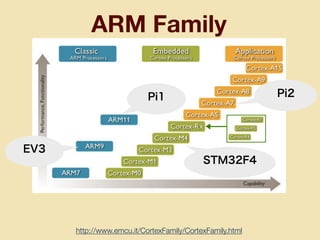
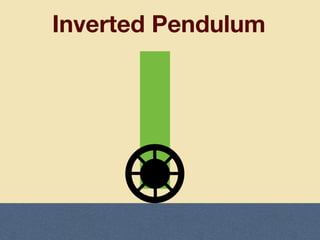





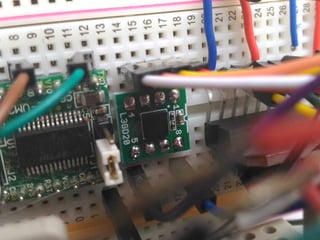
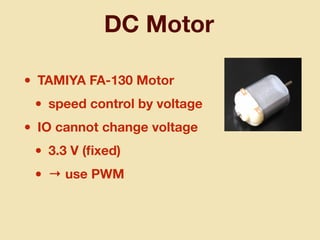


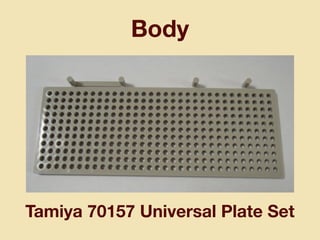

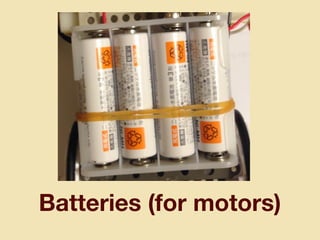

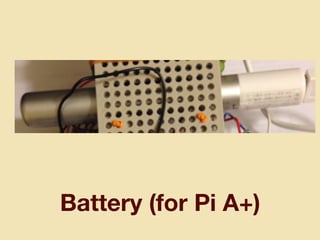
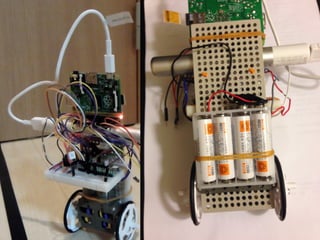
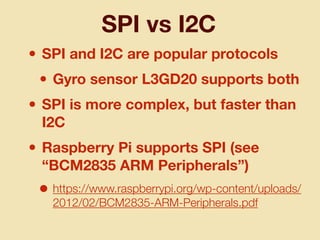
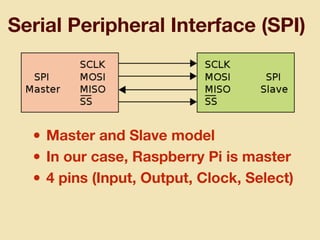
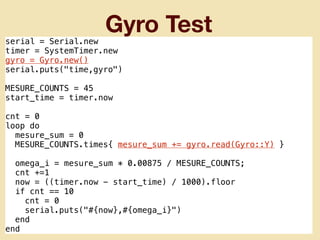

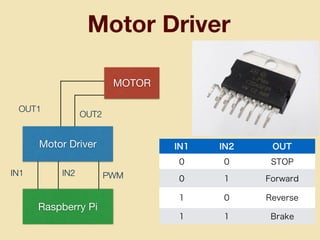
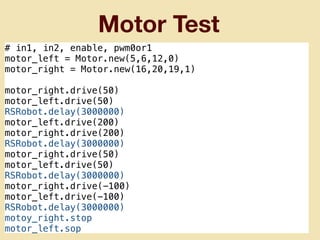

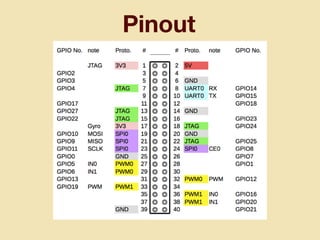
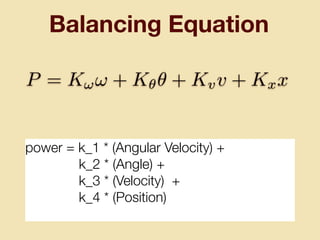
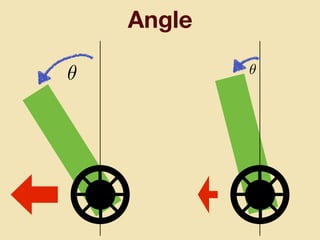
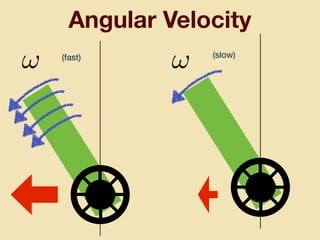
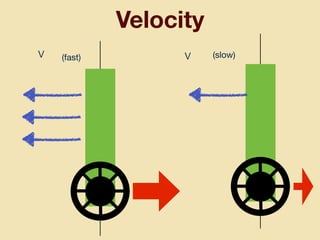
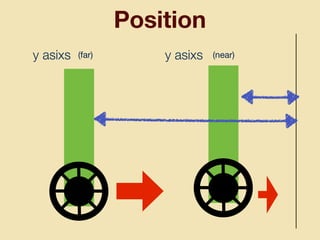
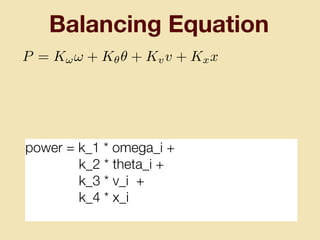
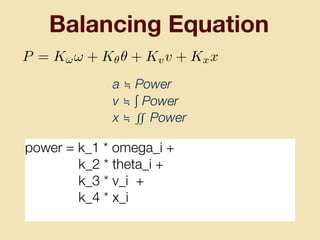
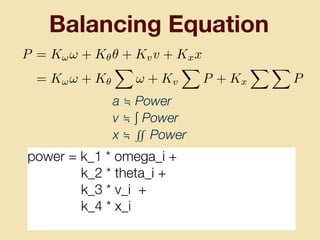
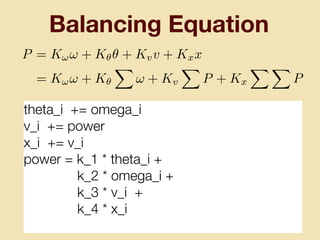
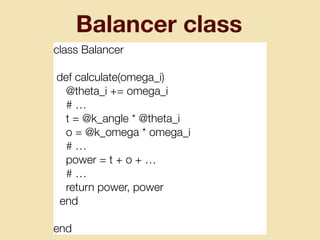
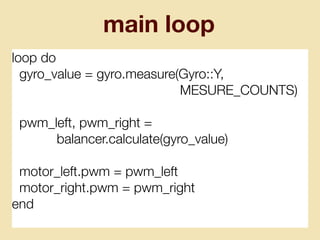
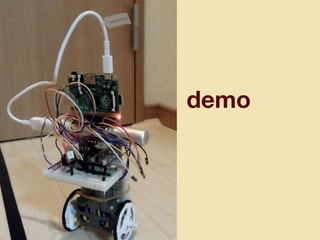
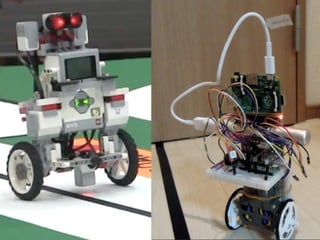

This document summarizes a presentation given at RubyConf 2015 about building self-balancing robots using Ruby and various hardware platforms. The presentation covered: 1. Using the LEGO Mindstorms EV3 with mruby-ev3rt to build an inverted pendulum robot that balances itself. 2. A DIY approach using a Raspberry Pi, gyroscope sensor, DC motors, and motor driver to implement the same balancing behavior from scratch. 3. The balancing algorithm, which calculates motor power needed to balance based on angle, angular velocity, velocity, and position measurements from the gyroscope.
































































![5G Explained! A High Level Overview [Introduction]](https://cdn.slidesharecdn.com/ss_thumbnails/5gexplainedahighleveloverview-260119165306-cc137a3e-thumbnail.jpg?width=640&height=640&fit=bounds)











