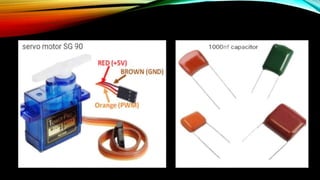
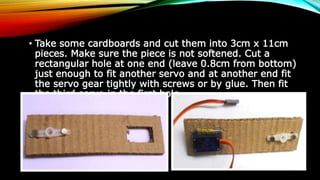
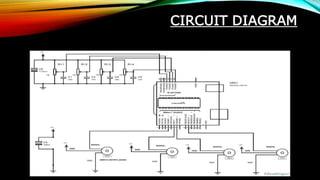
This document summarizes a student presentation on a simple robotic arm project using Arduino. The robotic arm is constructed out of cardboard and uses 4 servo motors that are controlled by potentiometers attached to an Arduino Uno board. Servo motors allow for accurate movement and positioning. The arm consists of 4 links connected by servos. Rotating the potentiometers provides variable voltage that maps to servo positions, allowing the user to control the arm. The code reads the potentiometer values and writes angles to each servo to manipulate the arm. The simple low-cost design makes it suitable for beginners to learn about robotics and Arduino.