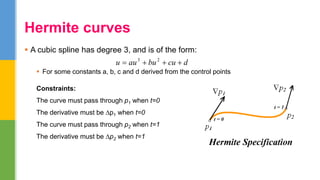
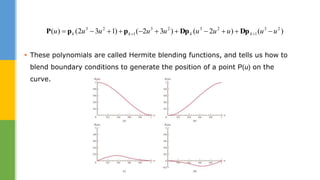
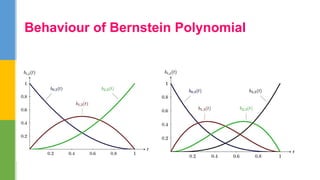
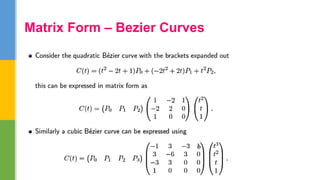
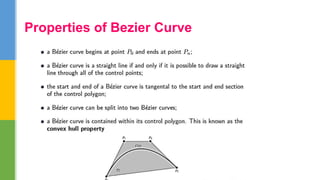
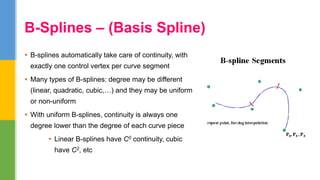
This document discusses Hermite curves and Bezier curves. Hermite curves are defined by two endpoints and the tangent vectors at those endpoints. This provides enough information to define a cubic Hermite spline. Bezier curves use control points and Bernstein polynomials to define the curve. Both curves use parametric equations and have properties like following the shape of control points and containing curves within the convex hull of control points. The document also discusses B-spline curves, which provide automatic continuity, and NURBS curves, which extend B-splines to be rational curves using weights.