Downloaded 22 times
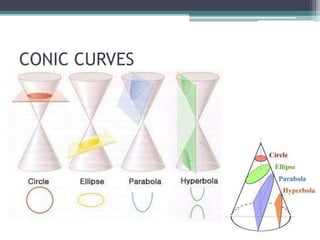
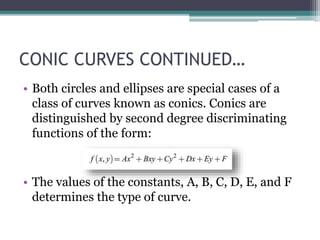
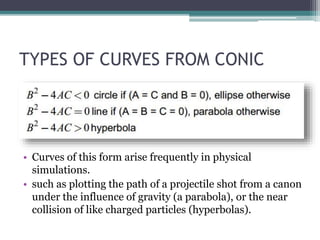
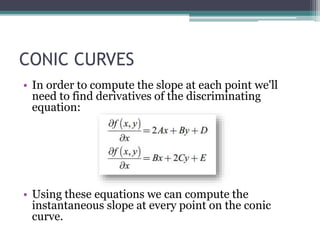


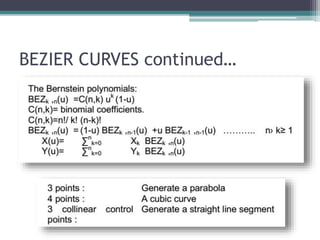
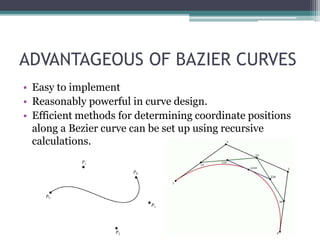
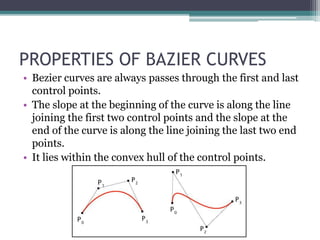

This document provides an introduction to different types of curves used in computer graphics. It discusses curve continuity, conic curves such as parabolas and hyperbolas, piecewise curves, parametric curves, spline curves, Bezier curves, B-spline curves, and applications of fractals. Key points covered include the four types of continuity, how conic curves are defined by discriminant functions, using control points to define piecewise, spline, Bezier and B-spline curves, and properties of Bezier curves such as passing through the first and last control points.