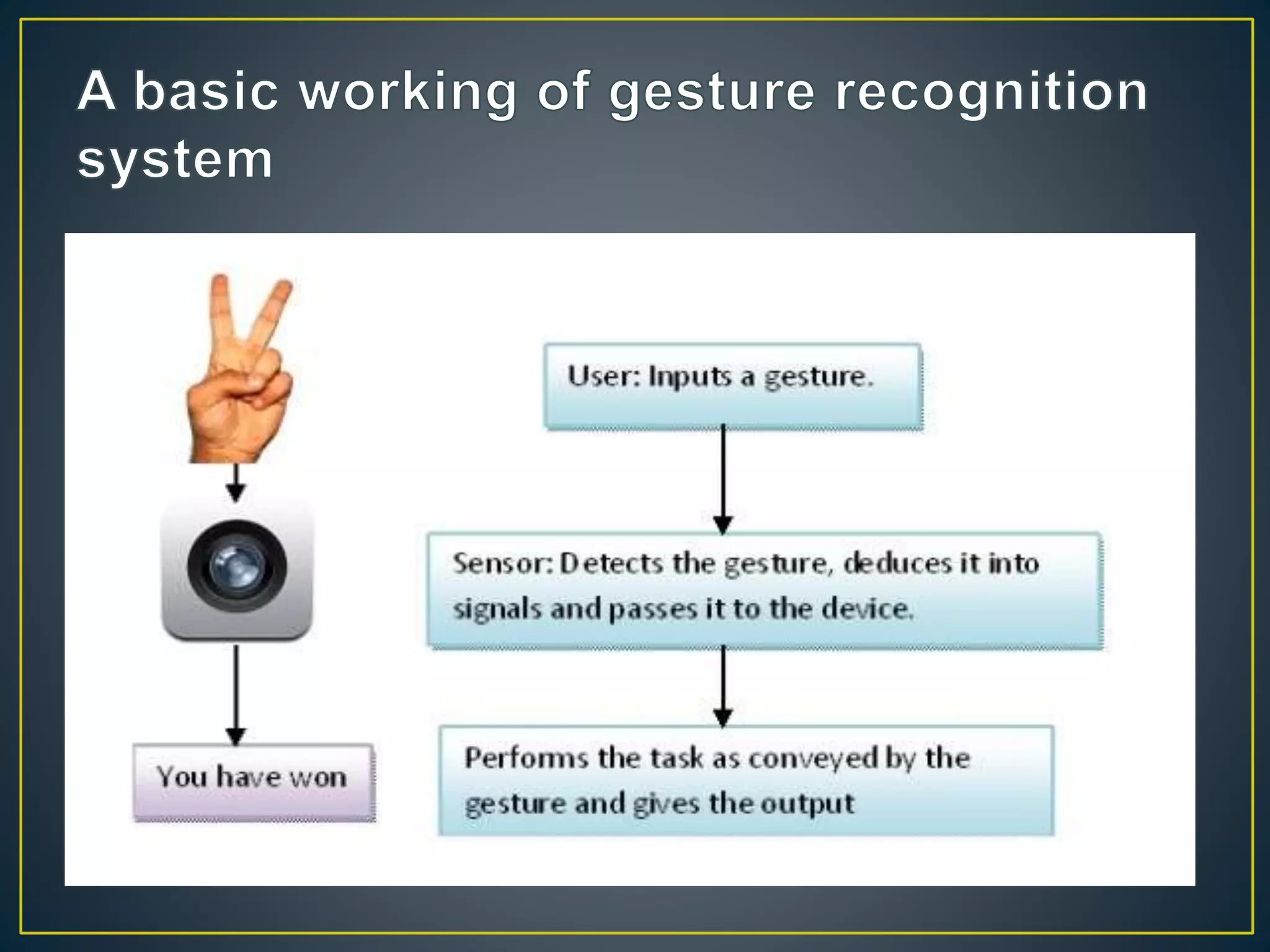
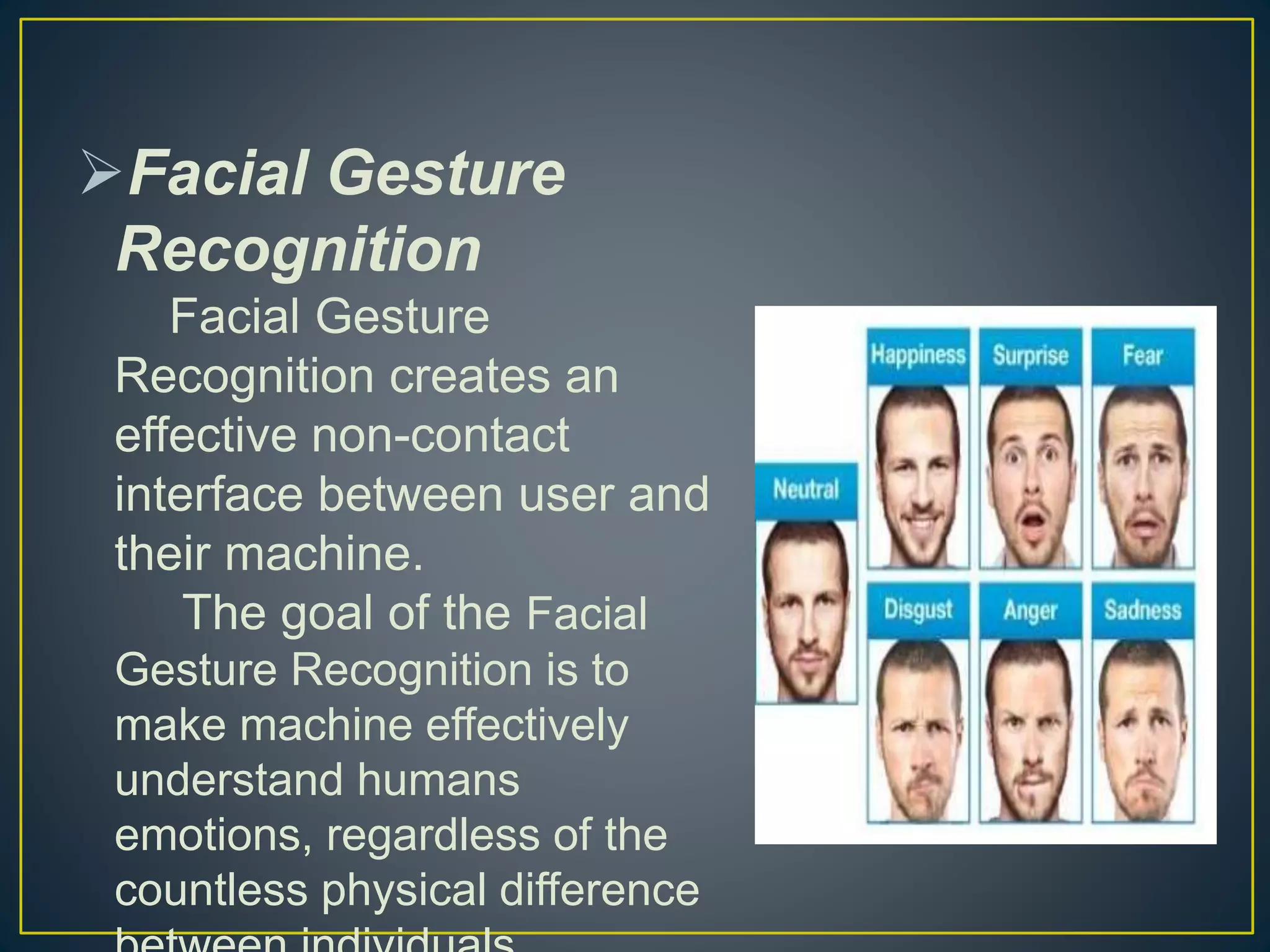
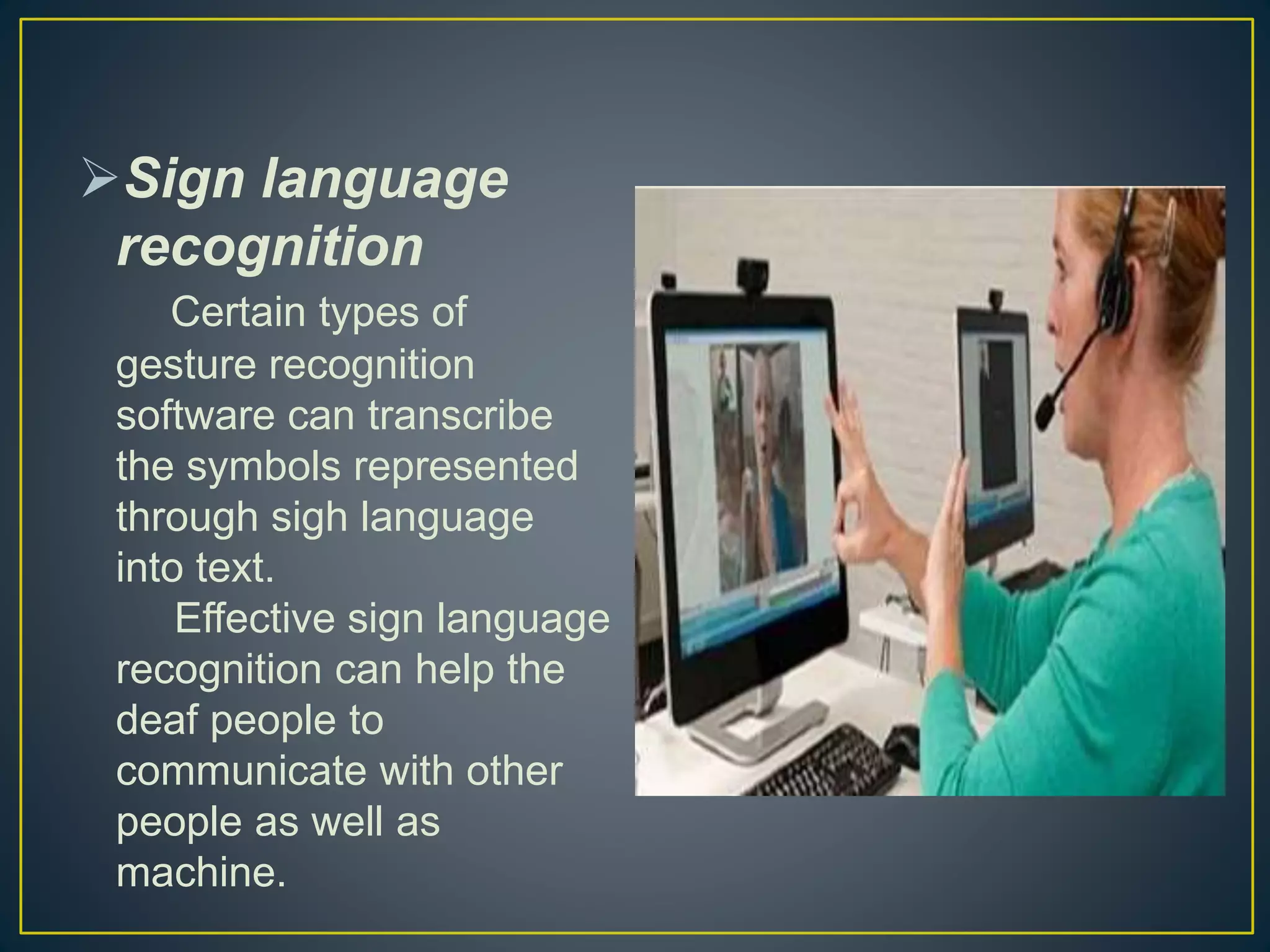
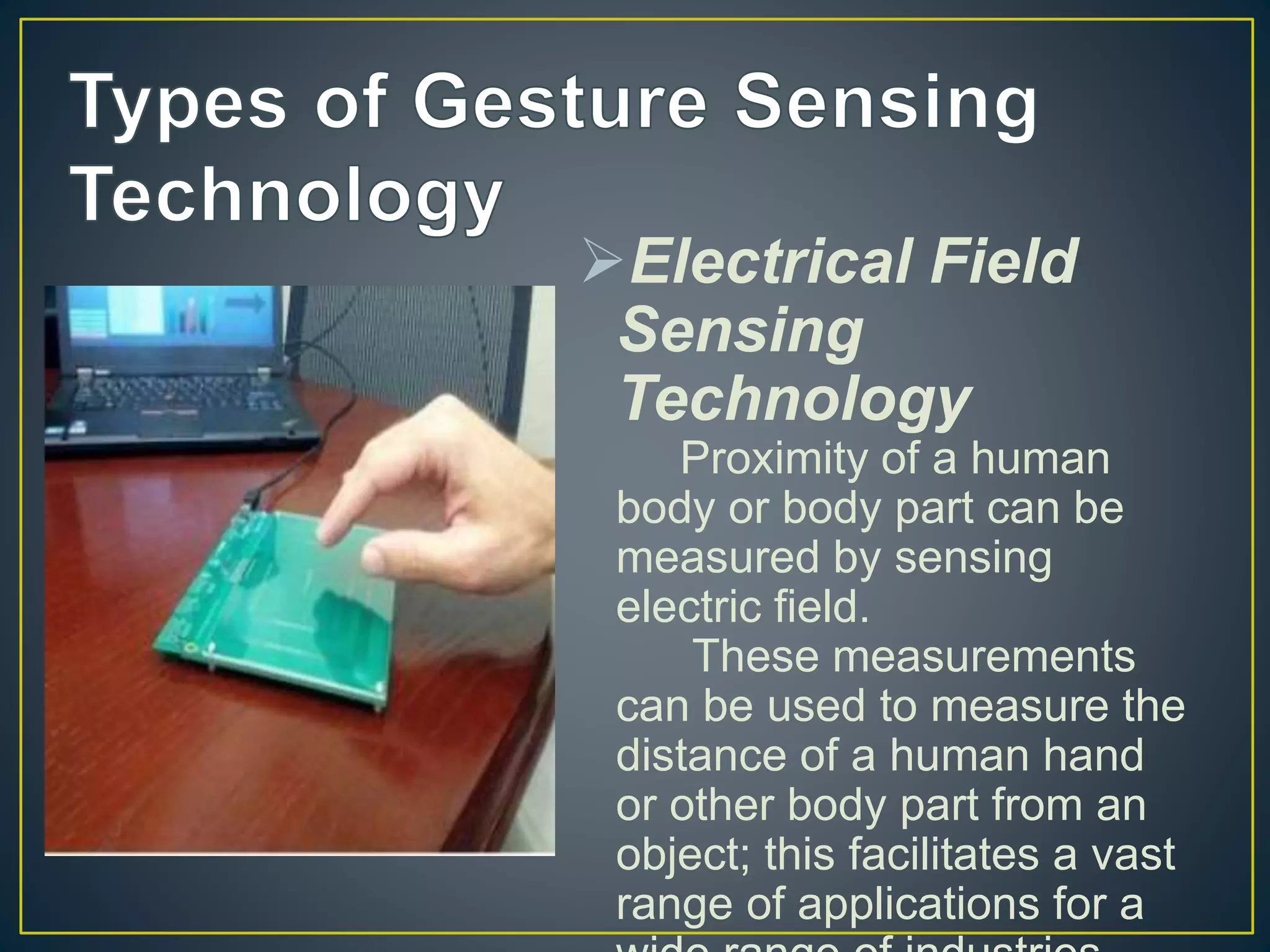
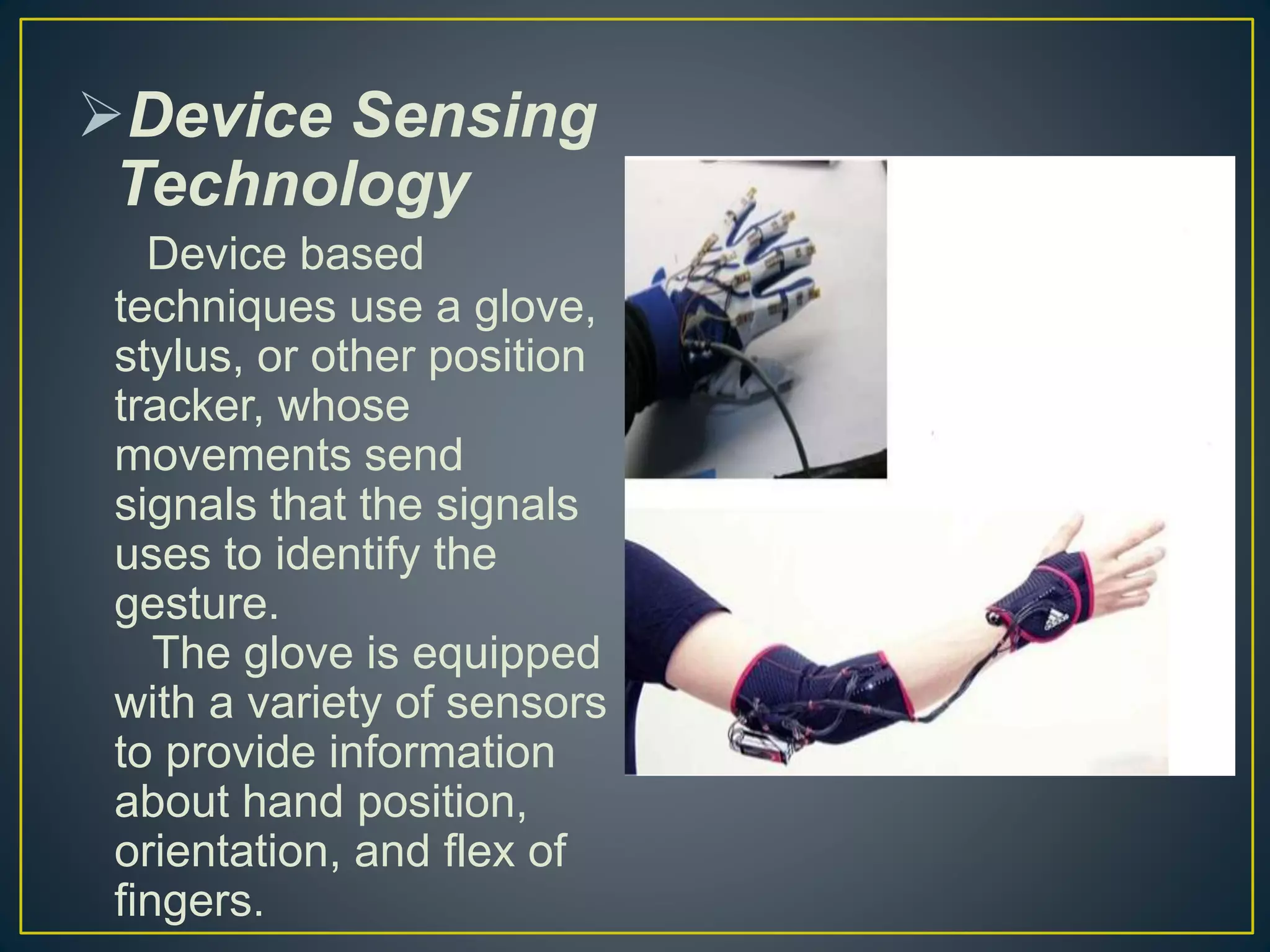
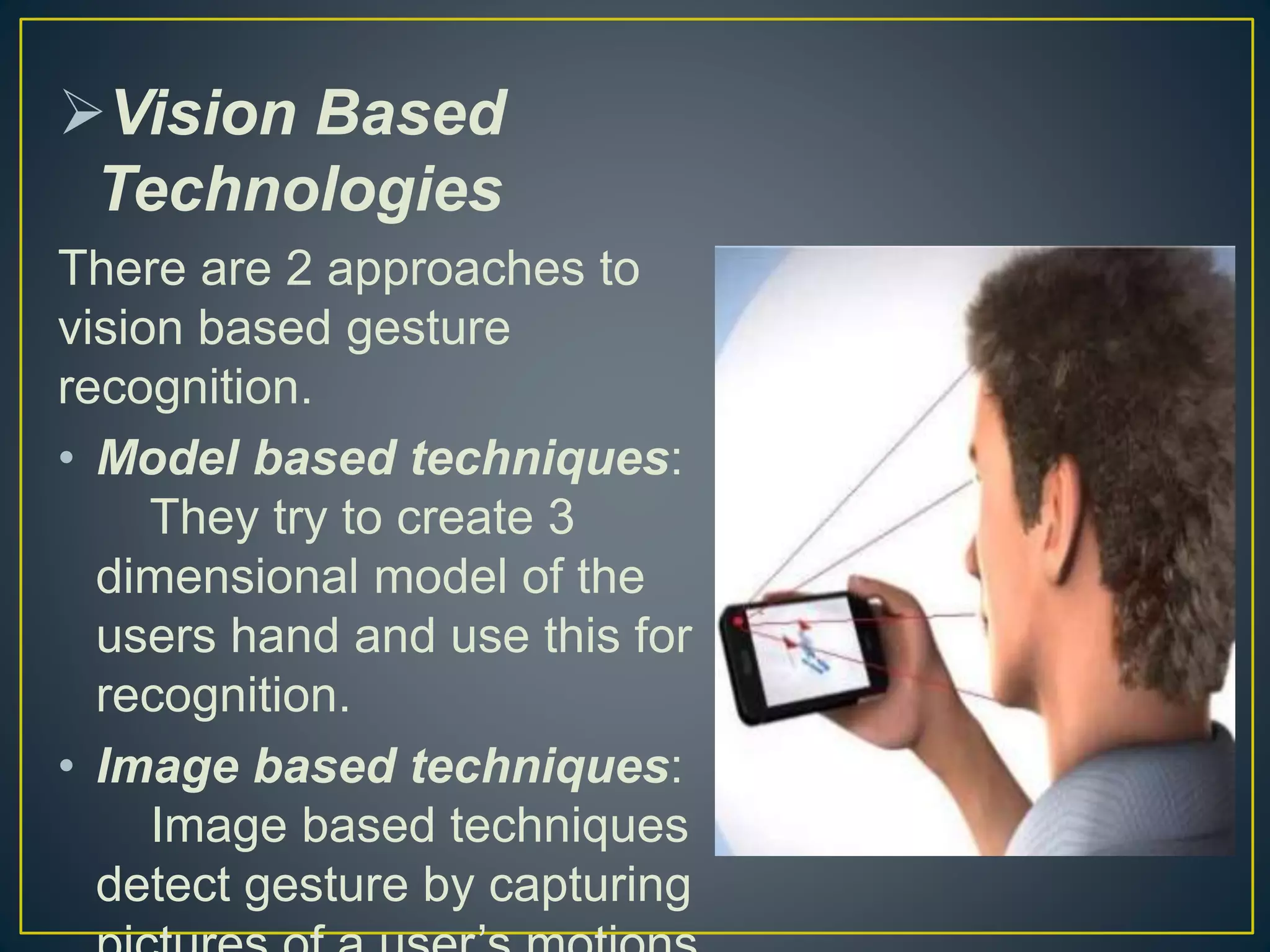
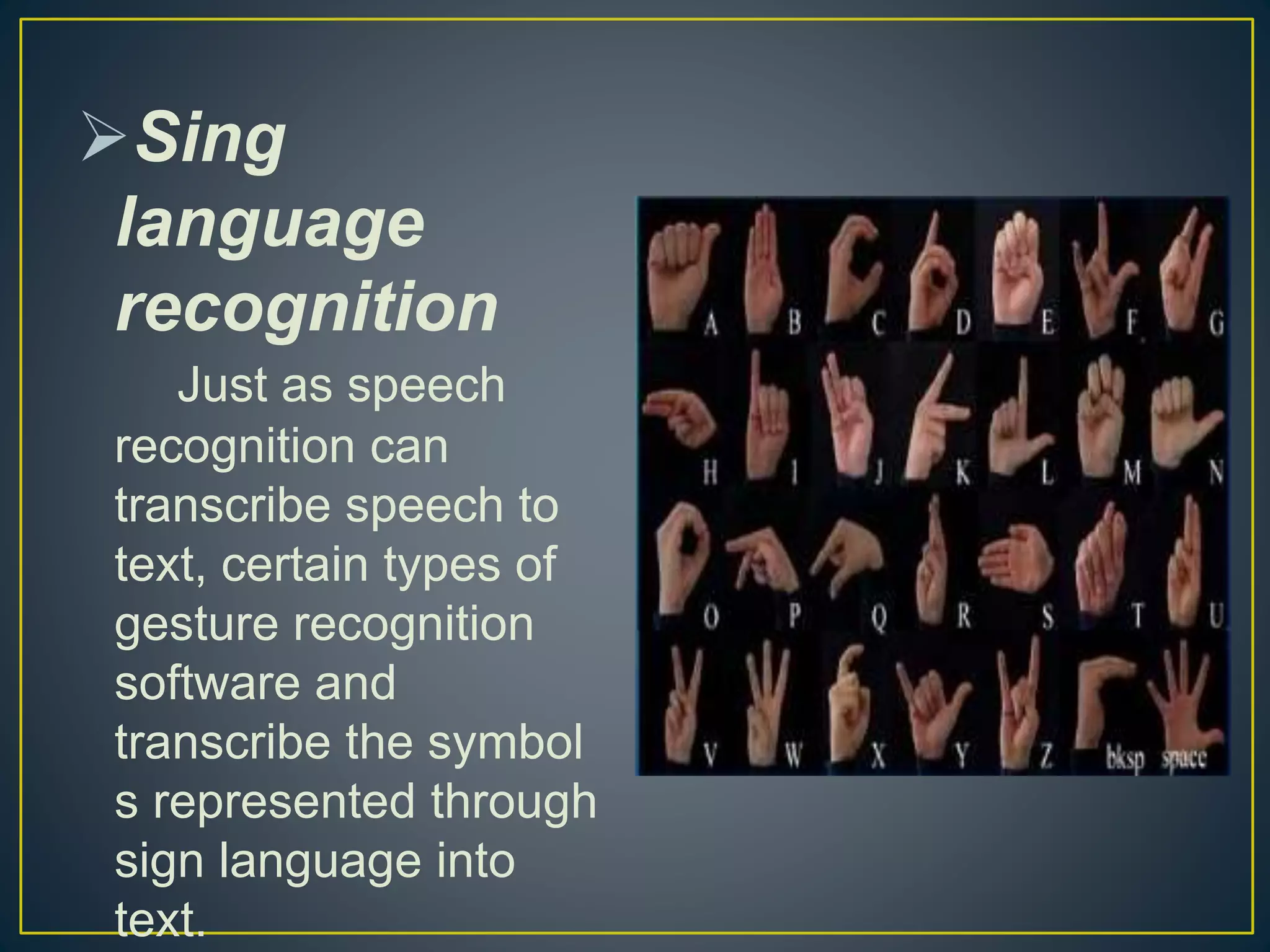
This document discusses gesture recognition. It begins by introducing gesture recognition and its evolution from graphical user interfaces using mice and keyboards. It then defines different types of gestures including iconic, deictic, metaphoric, and beat gestures. The document outlines the basic working of a gesture recognition system and different types of gesture sensing technologies like hand gesture recognition, facial gesture recognition, sign language recognition, and vision-based techniques. It discusses input devices used for gesture tracking and various applications of gesture recognition like socially assistive robotics, sign language translation, virtual controllers, and remote control. Finally, it addresses challenges in gesture recognition like lack of a universal gesture language and issues with robustness.