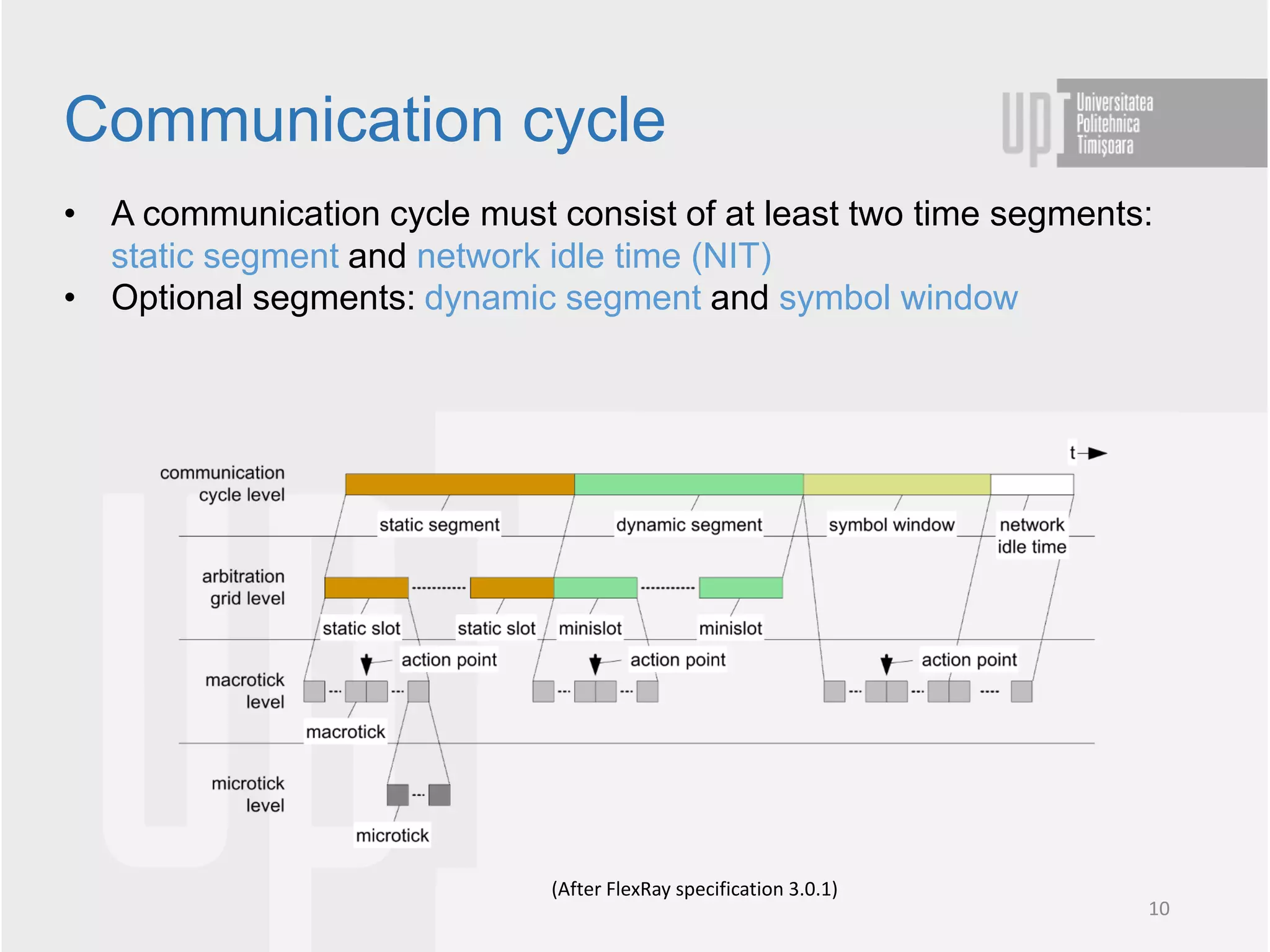
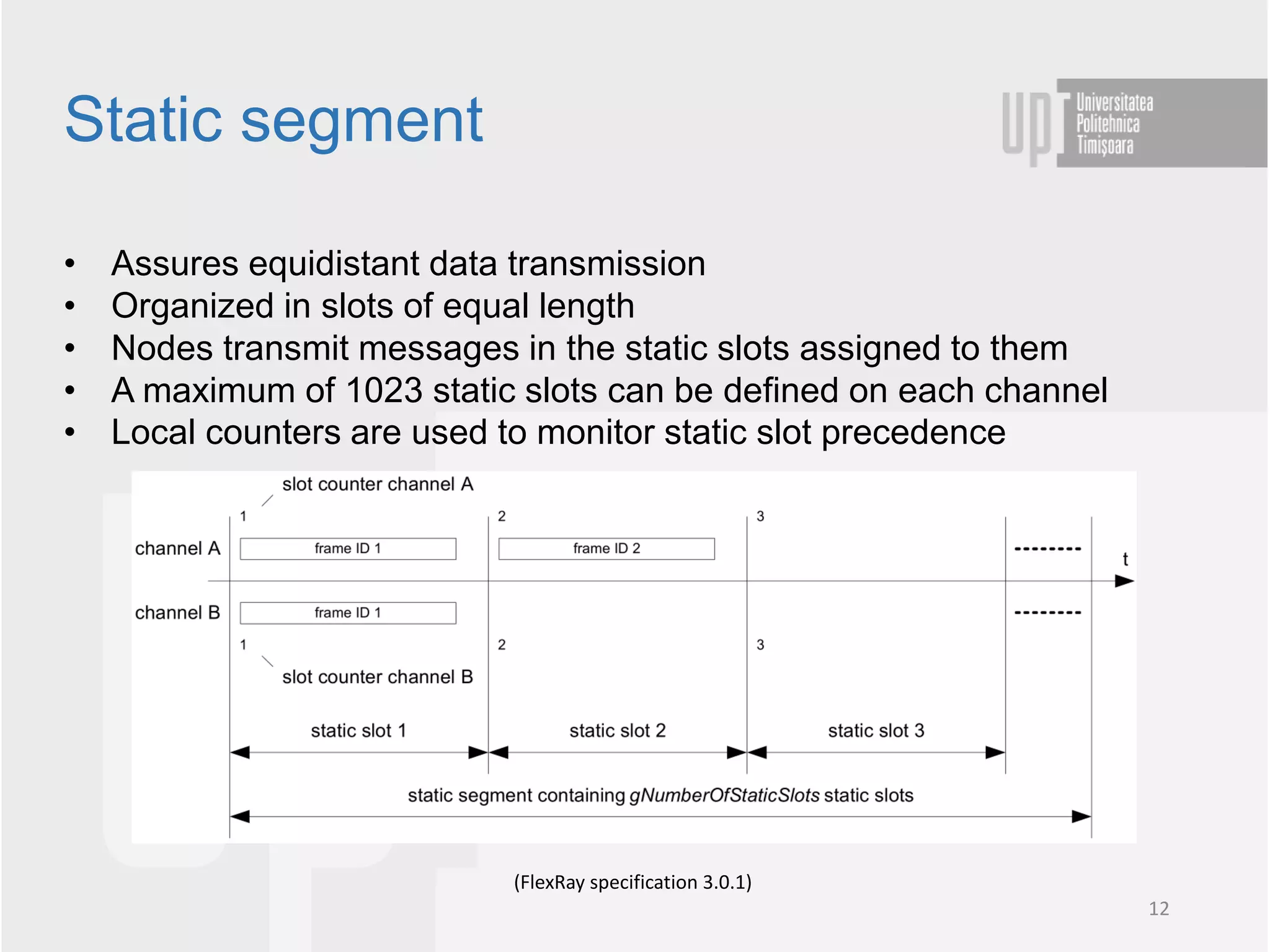
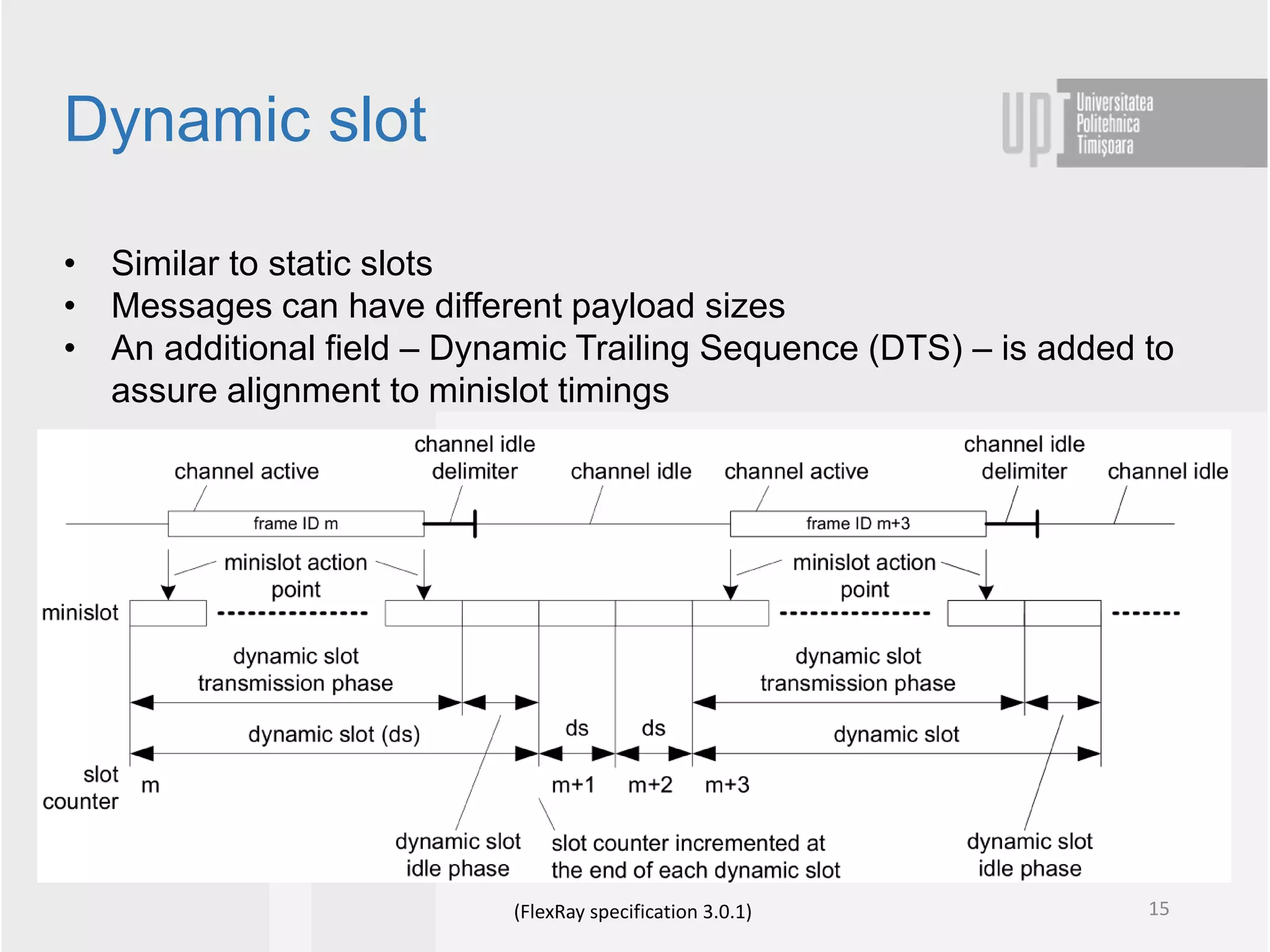
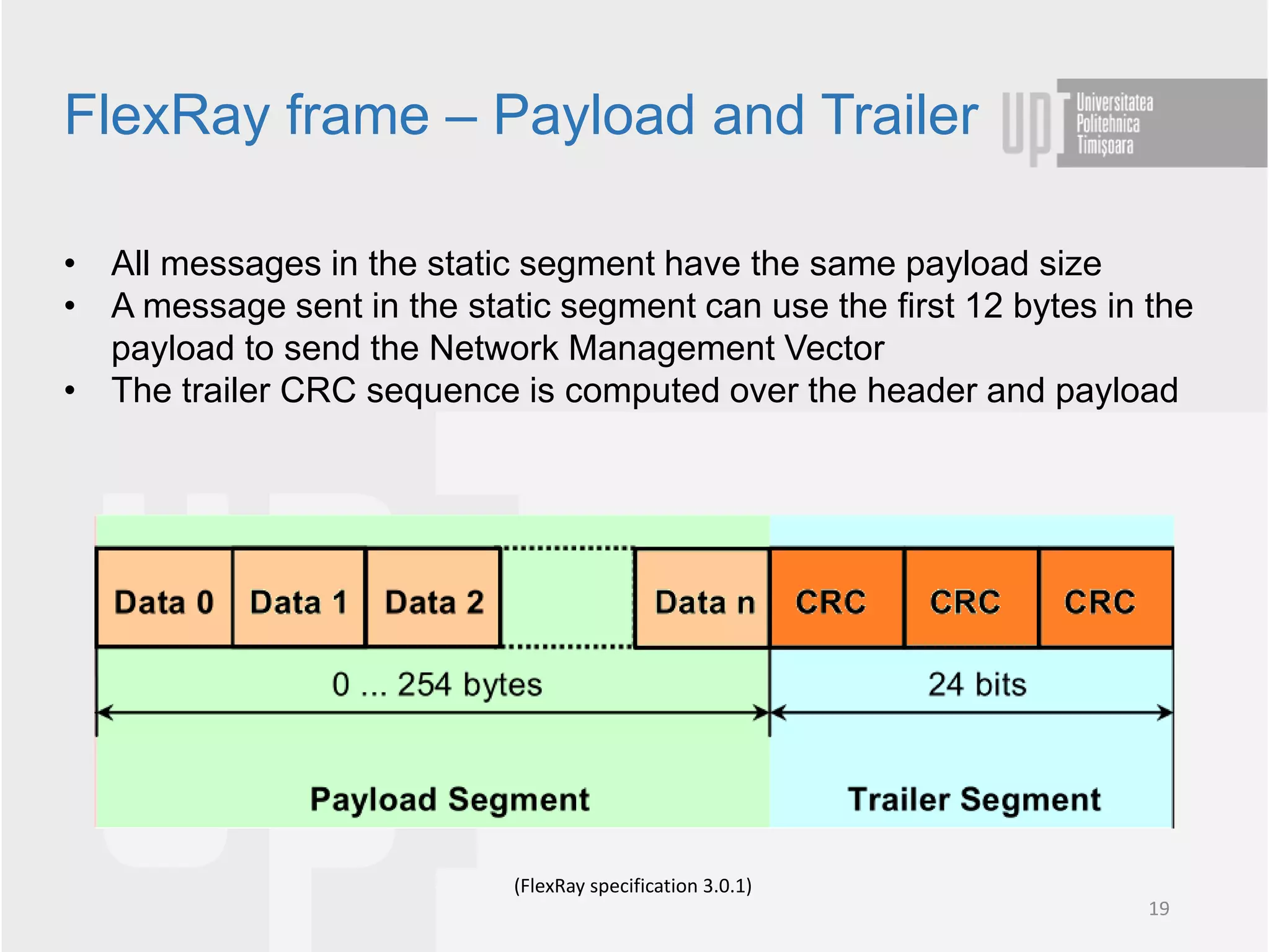
The document discusses the motivation, history, characteristics, and technical specifications of the FlexRay communication protocol. It was developed to meet stringent safety and reliability requirements for automotive applications that CAN was unable to fulfill. Key points include its use of redundant channels, time-triggered communication principle, and TDMA/FTDMA access methods to enable deterministic and fault-tolerant messaging.











































































![Vibe Coding vs. Spec-Driven Development [Free Meetup]](https://cdn.slidesharecdn.com/ss_thumbnails/vibecodingvsspecdrivendevelopment-251209105622-43f455e7-thumbnail.jpg?width=640&height=640&fit=bounds)



