Downloaded 23 times











![
Phase 2: This is the phase of accumulating numbers of
white messages. Upon the receipt of an INIT control
message or a red computation message, a white process
turns red and records its local state.
Subsequently, the algorithm directs the whole processes
to calculate in a symmetrical manner the total number of
white messages that each process is supposed to receive.
In particular, every process pi maintains a vector of size
N, wmsg senti[], to count in wmsg senti[j] the number of
white messages that it has sent to another process pj .](https://image.slidesharecdn.com/seminar-121006015450-phpapp02/85/Flexible-Symmetric-Global-Snapshot-20-320.jpg)

![
Phase 3: The is the phase of recording channel states.
When a red process pi receives a white computation
message along a channel, such a message is added to
the state of the channel. In addition, when the second
phase is done and all white messages supposed to be
received by pi have been received by pi, i.e. wmsg
receivedi = sum wmsgi[i], pi turns white and then
terminates the algorithm locally.](https://image.slidesharecdn.com/seminar-121006015450-phpapp02/85/Flexible-Symmetric-Global-Snapshot-22-320.jpg)






![References
[1] Jichiang Tsai, “Flexible Symmetrical Global-Snapshot Algorithms for
Large-Scale Distributed Systems,” IEEE Transactions On Parallel And
Distributed Systems, vol. Xx, no. Y, apr. 2012
[2] R. Garg, V. Garg, and Y. Sabharwal, “Efficient algorithms for global
snapshots in large distributed systems,” IEEE Trans. Parallel and Distributed
Systems, vol. 21, no. 5, pp. 620–630, May 2010.
[3] A. D. Kshemkalyani, “Fast and message-efficient global snapshot
algorithms for large-scale distributed systems,” IEEE Trans. Parallel and
Distributed Systems, vol. 21, no. 9, pp. 1281–1209, Sept. 2010.
[4]F. Mattern, “Efficient Algorithms for Distributed Snapshots and Global
Virtual Time Approximation,” J. Parallel and Distributed Computing, pp.
423-434, Aug. 1993.
[5] K.M. Chandy and L. Lamport, “Distributed Snapshots: Determining
Global States of Distributed Systems,” ACM Trans. Computer Systems,
vol. 3, no. 1, pp. 63-75, Feb. 1985.](https://image.slidesharecdn.com/seminar-121006015450-phpapp02/85/Flexible-Symmetric-Global-Snapshot-29-320.jpg)


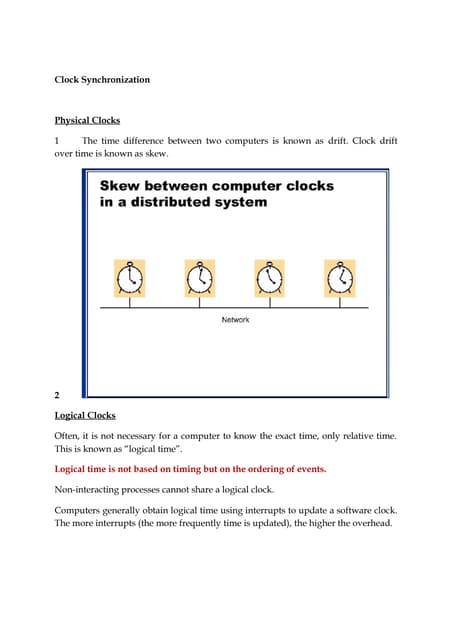
This document discusses snapshots in distributed systems. It begins by defining a snapshot as recording the simultaneous local states of all processes and communication channels. Snapshots can be used for deadlock detection, monitoring systems, and checkpointing distributed databases. Determining a global state is difficult due to the distributed nature of systems with no shared memory or clocks. Consistent cuts that do not cross message orderings can accurately capture a global state. The document then discusses several snapshot algorithms, including Chandy-Lamport for FIFO systems using markers, and Lai-Yang for non-FIFO systems using message coloring.