The document describes a mobile controlled robot project. It uses two mobile phones, with one as the transmitter and the other as the receiver attached to the robot. When buttons are pressed on the transmitter phone, DTMF tones are generated and received by the receiver phone. The tones are decoded by a microcontroller which controls motors via a motor driver to move the robot forward, backward, left, and right. A wireless camera attached to the robot transmits video to an output screen. The robot has a range as large as the mobile network coverage area and allows remote monitoring and control.
![Mobile Controlled Robot 2013-14
DEPT. OF ELECTRONICS & COMMUNICATION, SIT, TUMKUR 1
CHAPTER 1
INTRODUCTION
This project involves the idea to couple the potential of mobile with microcontroller to
operate the robot. The functioning of mobile controlled robot is similar to the radio
frequency remote system which consists of a transmitter and a receiver unit. Therefore,
two mobile phones are used for effective transmission and reception of signals. The robot
is controlled by the mobile phone held by the user, which communicates with the mobile
phone attached to the robot. In the course of a phone call, if any button is pressed, a tone
corresponding to the button pressed is heard at the receiver end, which is called „Dual
Tone Multiple frequency‟ (DTMF) tone. The robot receives these tones via the receiver
mobile phone which is on the board. The received tone is processed by the
microcontroller with the help of DTMF decoder IC. The microcontroller communicates
with the motor driver which drives the robot in forward, reverse, right and left direction
according to the key pressed on the transmitter mobile. Wireless camera is attached to
the robot to realize the physical aspects of real world and its surrounding.
1.1 Motivation
Using wireless communication to monitor robot employs radio frequency (RF), which
has a drawback of limited working range, limited frequency range. By using a mobile
phone, for controlling robot can overcome these limitations. It provides the advantage of
working range as large as the area of coverage of service provider. Although the
appearance and the capabilities of every robot vary drastically, all robots share some
common feature of mechanical, movable structure under some form of control [4].The
control of the robot involves three distinct phases: direction, processing and action.
Generally, the direction is given by the user who is monitoring the robot, processing is
done by the on-board microcontroller or processor, and action is performed by motors
and wireless camera.
1.2 Objective
The objective of the project is to design a mobile controlled robot that has working range
as large as the area of coverage of service provider. For seeing the obstacles in the path](https://image.slidesharecdn.com/8bcfce28-c649-4b7b-a0e5-5596bfd9b9d6-150403132132-conversion-gate01/85/Final-Report11-1-320.jpg)
![Mobile Controlled Robot 2013-14
DEPT. OF ELECTRONICS & COMMUNICATION, SIT, TUMKUR 1
CHAPTER 1
INTRODUCTION
This project involves the idea to couple the potential of mobile with microcontroller to
operate the robot. The functioning of mobile controlled robot is similar to the radio
frequency remote system which consists of a transmitter and a receiver unit. Therefore,
two mobile phones are used for effective transmission and reception of signals. The robot
is controlled by the mobile phone held by the user, which communicates with the mobile
phone attached to the robot. In the course of a phone call, if any button is pressed, a tone
corresponding to the button pressed is heard at the receiver end, which is called „Dual
Tone Multiple frequency‟ (DTMF) tone. The robot receives these tones via the receiver
mobile phone which is on the board. The received tone is processed by the
microcontroller with the help of DTMF decoder IC. The microcontroller communicates
with the motor driver which drives the robot in forward, reverse, right and left direction
according to the key pressed on the transmitter mobile. Wireless camera is attached to
the robot to realize the physical aspects of real world and its surrounding.
1.1 Motivation
Using wireless communication to monitor robot employs radio frequency (RF), which
has a drawback of limited working range, limited frequency range. By using a mobile
phone, for controlling robot can overcome these limitations. It provides the advantage of
working range as large as the area of coverage of service provider. Although the
appearance and the capabilities of every robot vary drastically, all robots share some
common feature of mechanical, movable structure under some form of control [4].The
control of the robot involves three distinct phases: direction, processing and action.
Generally, the direction is given by the user who is monitoring the robot, processing is
done by the on-board microcontroller or processor, and action is performed by motors
and wireless camera.
1.2 Objective
The objective of the project is to design a mobile controlled robot that has working range
as large as the area of coverage of service provider. For seeing the obstacles in the path](https://image.slidesharecdn.com/8bcfce28-c649-4b7b-a0e5-5596bfd9b9d6-150403132132-conversion-gate01/75/Final-Report11-1-2048.jpg)



![Mobile Controlled Robot 2013-14
DEPT. OF ELECTRONICS & COMMUNICATION, SIT, TUMKUR 8
filter filters the high group frequency signal.
Frequency Detector: It is used to detect the frequency that has been passed from high
group and low group filter.
Code Detector: It converts the frequency into binary equivalent form. Code detector
counts the no of cycles of a given reference clock contained in a period of the input
signal and thus produces binary equivalent form. From there, it is passed to the latch
buffer.
Latch & Output Buffer: It latches the binary equivalent code onto the port 2 of the
micro-controller.
Steering Control Circuit: It controls frequency detector, code converter and output
latch to convert 16 DTMF tone-pairs into a 4-bit code as shown in Fig 3.2.
Internal Clock Circuit: The internal clock required by HT9170B is providedby 3.579545
MHz crystal.
Filter Section: The HT9170B consist of three band pass filters and two digital decoder
circuits to convert DTMF tone signal into digital code output.
Steering Control Circuit: The steering control circuit is used for measuring the
effective signal duration and for protecting against drop-out of valid signals.
Power-down and Inhibit Mode: When a logic high is applied to pin 6 (PWDN), then
it will place the device into standby mode to minimize power consumption.
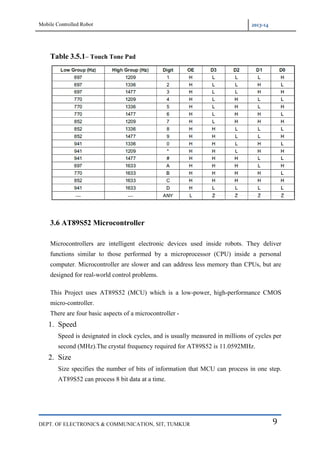
Working
When key 2 is pressed from “Touch Tone Pad” then, it will send a tone made by
adding 697 Hz and 1209 Hz to the other end of the line. The tones and assignment
in a DTMF system[4] is as shown in Table 3.5.1.](https://image.slidesharecdn.com/8bcfce28-c649-4b7b-a0e5-5596bfd9b9d6-150403132132-conversion-gate01/85/Final-Report11-8-320.jpg)









![Mobile Controlled Robot 2013-14
DEPT. OF ELECTRONICS & COMMUNICATION, SIT, TUMKUR 23
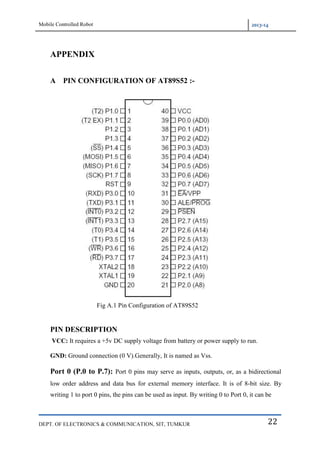
configured as output & external pull-up resistor will be needed to supply logic high.
Port 1(P1.0 to P1.7): Port 1 pins have no dual functions. When 1s are written to Port
1 pins, they are pulled high by the internal pull-ups and can be used as inputs. By writing
0, it can be used as output port.
Port 2 (P2.0 to P2.7): Port 2 is an 8-bit bidirectional I/O port with internal pull-ups.
When 1s are written to Port 1 pins, they are pulled high by the internal pull-ups and can
be used as inputs. By writing 0 to port, it can be used as output port. It has same function
as that of port 0 but it differs in 1 respect that it is used to supply a high order address
byte in conjunction with the port 0 low order byte to address external memory.
Port 3(P3.0 to P3.7): Port 3 is an 8-bit bidirectional I/O port with internal pull-ups.
When 1s are written to Port 1 pins, they are pulled high by the internal pull-ups and can
be used as inputs. By writing 0 to port, it can be used as output. Pins of port 3 can also be
programmed individually to be used as either I/O.
Reset: Reset pin is used to set the 8051 microcontroller to its initial values, while the
microcontroller is working or at the initial start of application. The RESET pin must be
set high for 2 machine cycles.
ALE (Address Latch Enable): It is a type of control signal which is used for
external memory interfacing. It is used for latching the address on port 0 so that it can be
used as data bus.
EA (External Enable): It is used to enable or disable external memory interfacing.
If there is no external memory requirement, this pin is pulled high by connecting it to
VCC. If the programmer wants to fetch instruction from external memory only, then he
must connect External Access (EA) pin to ground.
Program Store Enable: It is used to read signal from external program memory.
XTAL1 & XTAL2 (Crystal Input): It is used for interfacing an external crystal to
provide system clock [1 & 2].](https://image.slidesharecdn.com/8bcfce28-c649-4b7b-a0e5-5596bfd9b9d6-150403132132-conversion-gate01/85/Final-Report11-23-320.jpg)