Downloaded 86 times






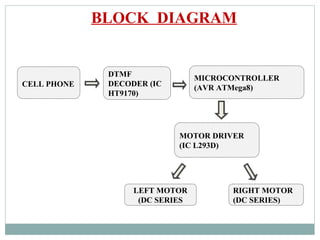




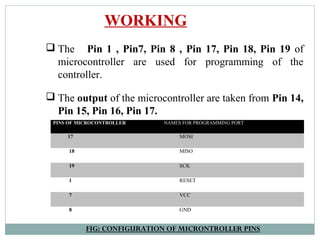


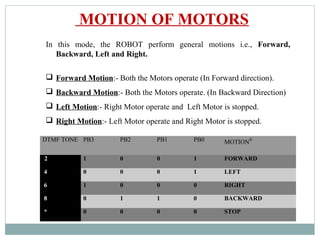


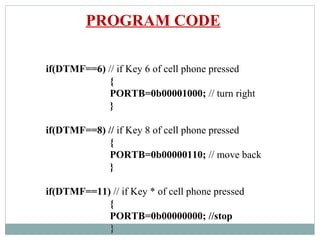


This document describes a mobile controlled robot that uses dual-tone multi-frequency (DTMF) tones sent from a cell phone to control the robot's movement. The robot uses a DTMF decoder chip to receive and decode DTMF tones into a 4-bit code that is read by a microcontroller. The microcontroller then sends signals to a motor driver chip which controls the two DC motors to move the robot forward, backward, left or right depending on the tone received. The overall system allows remote control of the robot's movement via DTMF tones sent from a mobile phone.

























































