Dtmf controlled bomb detecting robot
•Download as DOCX, PDF•
1 like•365 views
ECE Projects for Final Year, Embedded Projects in Bangalore, Engineering Projects in Bangalore, Final Year Projects in Vijayanagar, ECE projects in Vijayanagar, Embedded Project institute in Vijayanagar
Report
Share
Report
Share

Recommended
driverless Robot car controlled using GSM
This document describes a student project to build a mobile robot controlled by a mobile phone using DTMF tones. It provides background on the components used such as the DTMF decoder chip, microcontroller, motors, and includes schematics of the circuits used. The robot is designed so that pressing buttons on the mobile phone will generate DTMF tones that are received by the robot and used by the microcontroller to control the motors to move in different directions or turn.
GSM Based Wireless Robot Vehicle with POF features using DTMF
This document describes a GSM-based wireless robot vehicle that can be controlled remotely using DTMF tones and provides obstacle and fire detection features. The robot uses a microcontroller programmed in embedded C to control motors and sensors. It has a GSM module to allow remote control from any location via calls and to send text alerts upon obstacle/fire detection. When called, it sends an OTP for authentication before taking commands. The user can then use the phone keypad to send movement commands as DTMF tones. Sensors help detect obstacles and fires, triggering alert messages. This design overcomes range and interference issues of prior RF-based systems, allowing robust remote control and monitoring from a distance.
Pankaj project report
This document is a project report submitted by Mr. Pankaj Rai for a diploma in electronics and telecommunications engineering. The project is on a DTMF based mobile controlled robot. The report includes an introduction describing how the robot is controlled via DTMF tones sent from a mobile phone, block diagrams of the system components, descriptions of the hardware used including the power supply, transformer, rectifier, regulator, motors, and a circuit diagram. It also includes testing procedures and potential applications and future improvements. The overall purpose is to describe the design and implementation of a robot that can be remotely controlled via a mobile phone call.
Final Report
This document describes a DTMF controlled robot project. It includes a list of components used, descriptions of the Arduino, chassis, motors, integrated circuits, and circuit diagram. It explains how the robot works by receiving DTMF tones from a calling mobile phone, decoding the tones using an MT8870 chip, and sending signals to motors. It includes a flowchart, code, and references. The key aspects are that the robot is controlled remotely via DTMF tones from a calling mobile phone and uses an Arduino, motor driver, and DTMF decoder chip to receive tones and control motors accordingly.
Mobile controll robot
This document describes a mobile controlled robot that can be operated from any location via a mobile phone. The robot contains a mobile phone that receives DTMF tones corresponding to buttons pressed on the controlling phone. These tones are decoded by a microcontroller that directs motors for movement. When buttons are pressed, unique frequency combinations are generated and received by the robot phone. The microcontroller then controls motors via motor drivers to move the robot forward, backward or turn based on the decoded DTMF signals from the controlling phone.
Mni projects sc
This document lists 40 mini 8051 projects including alcohol detector, mobile controlled robot, automatic punching machine, bidirectional visitor counter, and biomedical monitoring system. It provides a high level overview of various electronics and microcontroller based systems that can be implemented as student or hobbyist projects using the 8051 microcontroller.
Cell Phone Operated Robot for Search and Research of an Object
Slide presented in 2013 10th International Conference on Wireless and Optical Communications Networks, IEEE Conference.
In this robot, an IR sensor detects an object robot’s arms pick up the object and keep in the carriage box this robot move with the help of cell phone by using DTMF technology, from arm the object is tested whether object is metallic or not, the operator get alert through SMS of object and its characteristics by using GSM technology.
Final Report11
The document describes a mobile controlled robot project. It uses two mobile phones, with one as the transmitter and the other as the receiver attached to the robot. When buttons are pressed on the transmitter phone, DTMF tones are generated and received by the receiver phone. The tones are decoded by a microcontroller which controls motors via a motor driver to move the robot forward, backward, left, and right. A wireless camera attached to the robot transmits video to an output screen. The robot has a range as large as the mobile network coverage area and allows remote monitoring and control.
Recommended
driverless Robot car controlled using GSM
This document describes a student project to build a mobile robot controlled by a mobile phone using DTMF tones. It provides background on the components used such as the DTMF decoder chip, microcontroller, motors, and includes schematics of the circuits used. The robot is designed so that pressing buttons on the mobile phone will generate DTMF tones that are received by the robot and used by the microcontroller to control the motors to move in different directions or turn.
GSM Based Wireless Robot Vehicle with POF features using DTMF
This document describes a GSM-based wireless robot vehicle that can be controlled remotely using DTMF tones and provides obstacle and fire detection features. The robot uses a microcontroller programmed in embedded C to control motors and sensors. It has a GSM module to allow remote control from any location via calls and to send text alerts upon obstacle/fire detection. When called, it sends an OTP for authentication before taking commands. The user can then use the phone keypad to send movement commands as DTMF tones. Sensors help detect obstacles and fires, triggering alert messages. This design overcomes range and interference issues of prior RF-based systems, allowing robust remote control and monitoring from a distance.
Pankaj project report
This document is a project report submitted by Mr. Pankaj Rai for a diploma in electronics and telecommunications engineering. The project is on a DTMF based mobile controlled robot. The report includes an introduction describing how the robot is controlled via DTMF tones sent from a mobile phone, block diagrams of the system components, descriptions of the hardware used including the power supply, transformer, rectifier, regulator, motors, and a circuit diagram. It also includes testing procedures and potential applications and future improvements. The overall purpose is to describe the design and implementation of a robot that can be remotely controlled via a mobile phone call.
Final Report
This document describes a DTMF controlled robot project. It includes a list of components used, descriptions of the Arduino, chassis, motors, integrated circuits, and circuit diagram. It explains how the robot works by receiving DTMF tones from a calling mobile phone, decoding the tones using an MT8870 chip, and sending signals to motors. It includes a flowchart, code, and references. The key aspects are that the robot is controlled remotely via DTMF tones from a calling mobile phone and uses an Arduino, motor driver, and DTMF decoder chip to receive tones and control motors accordingly.
Mobile controll robot
This document describes a mobile controlled robot that can be operated from any location via a mobile phone. The robot contains a mobile phone that receives DTMF tones corresponding to buttons pressed on the controlling phone. These tones are decoded by a microcontroller that directs motors for movement. When buttons are pressed, unique frequency combinations are generated and received by the robot phone. The microcontroller then controls motors via motor drivers to move the robot forward, backward or turn based on the decoded DTMF signals from the controlling phone.
Mni projects sc
This document lists 40 mini 8051 projects including alcohol detector, mobile controlled robot, automatic punching machine, bidirectional visitor counter, and biomedical monitoring system. It provides a high level overview of various electronics and microcontroller based systems that can be implemented as student or hobbyist projects using the 8051 microcontroller.
Cell Phone Operated Robot for Search and Research of an Object
Slide presented in 2013 10th International Conference on Wireless and Optical Communications Networks, IEEE Conference.
In this robot, an IR sensor detects an object robot’s arms pick up the object and keep in the carriage box this robot move with the help of cell phone by using DTMF technology, from arm the object is tested whether object is metallic or not, the operator get alert through SMS of object and its characteristics by using GSM technology.
Final Report11
The document describes a mobile controlled robot project. It uses two mobile phones, with one as the transmitter and the other as the receiver attached to the robot. When buttons are pressed on the transmitter phone, DTMF tones are generated and received by the receiver phone. The tones are decoded by a microcontroller which controls motors via a motor driver to move the robot forward, backward, left, and right. A wireless camera attached to the robot transmits video to an output screen. The robot has a range as large as the mobile network coverage area and allows remote monitoring and control.
Dtmf based human less boat control for oceanic research applications
This project describes a prototype boat that can be remotely controlled using Dual-Tone Multi-Frequency (DTMF) signals. The boat is controlled by pressing number keys on a mobile phone, which sends DTMF signals that are received and decoded by a DTMF decoder connected to an AT89S52 microcontroller. The microcontroller then controls motors through an H-bridge circuit to move the boat forward, backward, left, or right. This remote controlled boat design could be useful for applications like mines detection and oceanographic research.
BEST FINAL YEAR PROJECT CENTER CHENNAI MAASTECH-BEST BEST PROJECTS
BEST FINAL YEAR PROJECT CENTER CHENNAI MAASTECH-BEST BEST PROJECTS/COCHIN,HYDERABAD, BANGALORE,TAMILNADU..
Abstract:
This project aims at designing a robot, which has freedom of movement along all the 3 axes and its motion is controlled by means of wheels. The user can control the movements using a Cellphone from a remote place. The system is made more useful by introducing artificial intelligence to it. By artificial intelligence, we mean designing the robot is such a manner that in situation which require decision making, the robot identifies the presence of the obstacle, alerts the user and moreover awaits instruction from the user for the further action. Other condition, which the robot can determine, is presence of fire. I.e., high temperature and presence of metals in vicinity.
BEST ROBOTIC PROJECT CENTER CHENNAI-ROBOTIC PROJECT CENTER MAASTECH
BEST ROBOTIC PROJECT CENTER CHENNAI-ROBOTIC PROJECT CENTER MAASTECH..............
Introduction
A robot is an electro-mechanical device that can perform autonomous or preprogrammed tasks. A robot may act under the direct control of a human (eg. the robotic arm of the space shuttle) or autonomously under the control of a programmed computer. Robots may be used to perform tasks that are too dangerous or difficult for humans to implement directly (e.g. nuclear waste clean up) or may be used to automate repetitive tasks that can be performed with more precision by a robot than by the employment of a human (e.g. automobile production.)
Smart phone based robotic control for surveillance applications
Abstract The robotics and automation industry which is ruled the sectors from manufacturing to household entertainments. It is widely used because of its simplicity and ability to modify to meet changes of needs. The project is designed to develop a robotic vehicle using android application for remote operation attached with wireless camera for monitoring purpose. The robot along with camera can wirelessly transmit real time video with night vision capabilities. This is kind of robot can be helpful for spying purpose in war fields. Keywords: Android, Robot, Bluetooth, Robotic control
Smart phone based robotic control for surveillance applications
IJRET : International Journal of Research in Engineering and Technology is an international peer reviewed, online journal published by eSAT Publishing House for the enhancement of research in various disciplines of Engineering and Technology. The aim and scope of the journal is to provide an academic medium and an important reference for the advancement and dissemination of research results that support high-level learning, teaching and research in the fields of Engineering and Technology. We bring together Scientists, Academician, Field Engineers, Scholars and Students of related fields of Engineering and Technology
Project Summary
This document describes 4 projects:
1. An electronic vending machine that allows customers to order items from a shop without visiting in person or using the internet by authenticating via RFID and selecting items on a graphical LCD. Orders are sent via GSM to the customer and shop for delivery.
2. An autonomous vehicle parking system that uses sensors to detect an empty parking space and perpendicularly parks the vehicle without human intervention to reduce accidents and provide driver comfort.
3. A line follower robot that uses IR sensors and a microcontroller to follow a black line on the ground and stop when it detects obstacles. This project provided practical experience with microcontrollers.
4. A case study of OTDR instruments
ROBOTICS PROJECT ABSTRACT:Cellphone controlled3axisrobot
MAASTECH OFFER ROBOTICS PROJECTS....
Cell Phone Controlled Three Axis Robot With Artificial Intelligence
Introduction
A robot is an electro-mechanical device that can perform autonomous or preprogrammed tasks. A robot may act under the direct control of a human (eg. the robotic arm of the space shuttle) or autonomously under the control of a programmed computer. Robots may be used to perform tasks that are too dangerous or difficult for humans to implement directly (e.g. nuclear waste clean up) or may be used to automate repetitive tasks that can be performed with more precision by a robot than by the employment of a human (e.g. automobile production.)
An Improved Approach for Monitoring and Controlling of Flyovers and Bridges U...
An Improved Approach for Monitoring and Controlling of Flyovers and Bridges U...IJCSIS Research Publications
In modern technology robotics method may be applied to do our manual task. If robots are to become as common at household people will need to control and monitor them easily. In this aspect we have proposed, desired and designed a robot which can be controlled by mobile phones. Through which we can call for some emergency situations for Fire brigade, Law enforcement agency (Police, Army), Natural Calamity, Area Guard so on. On Mobile phone robot we have mounted a 9V battery as the power supply for the circuit and the motors. When the user calls the mobile the call is received by auto-answer mode. As the call continues when the user presses a button on his handset the tone that is generated is decoded by the DTMF decoder and the command is passed to the microcontroller which is pre-programmed. The Microcontroller then passes the command to the motor driver ICs for motion.it can also be used in reconnaissance or surveillance and anywhere there is the service provider tower of the connection provided that is mounted on the robot and Mostly The robot is small in size and it’s cost is also reasonable.An improved approach_for_monitoring_and
In modern technology robotics method may be applied to do our manual task. If robots are to become as common at
household people will need to control and monitor them easily. In this aspect we have proposed, desired and designed a robot which
can be controlled by mobile phones. Through which we can call for some emergency situations for Fire brigade, Law enforcement
agency (Police, Army), Natural Calamity, Area Guard so on. On Mobile phone robot we have mounted a 9V battery as the power
supply for the circuit and the motors. When the user calls the mobile the call is received by auto-answer mode. As the call continues
when the user presses a button on his handset the tone that is generated is decoded by the DTMF decoder and the command is passed
to the microcontroller which is pre-programmed. The Microcontroller then passes the command to the motor driver ICs for
motion.it can also be used in reconnaissance or surveillance and anywhere there is the service provider tower of the connection
provided that is mounted on the robot and Mostly The robot is small in size and it’s cost is also reasonable.
Robotic Soldier with EM Gun using Bluetooth Module
Need for security is growing day by day due to enormous development in the field of technology, but man wants to achieve this security at the minimum cost and minimum risk to human life. This is the factor which has encouraged us to develop this project which can achieve security at minimum risk to human life and at minimum cost. Here instead of exposing the soldier to do the hazardous job such as dangerous gas or hostile environment detection we have designed a machine which will do the same job more efficiently. This robot will be self-sufficient to sense the temperature of surrounding, and detecting if any obstacles are there at a certain distance depends on that robot guiding itself using the efficient algorithms and proper sensors.
IRJET - Mobile Controlled Robotic Car using DTMF
This document describes a mobile controlled robotic car that uses Dual Tone Multi Frequency (DTMF) technology. DTMF allows the robotic car to be controlled by phone. The system includes a microcontroller, DTMF decoder, motor driver, and DC motors. When buttons are pressed on the phone, corresponding DTMF tones are sent to the robotic car. The DTMF decoder converts the tones to binary for the microcontroller. The microcontroller then controls the motor driver and DC motors to move the car forward, backward, left, or right depending on the button pressed. This overcomes limitations of traditional radio frequency control, providing longer range and ability to control from any phone.
Robotic Soldier with EM Gun using Bluetooth Module
Need for security is growing day by day due to enormous development in the field of technology, but man wants to achieve this security at the minimum cost and minimum risk to human life. This is the factor which has encouraged us to develop this project which can achieve security at minimum risk to human life and at minimum cost. Here instead of exposing the soldier to do the hazardous job such as dangerous gas or hostile environment detection we have designed a machine which will do the same job more efficiently. This robot will be self-sufficient to sense the temperature of surrounding, and detecting if any obstacles are there at a certain distance depends on that robot guiding itself using the efficient algorithms and proper sensors.
Cell phone operated robot synopsis
This document provides a synopsis for a project titled "Cell Phone Operated Land Rover". The project aims to control a land rover using a mobile phone. A mobile phone would be connected to a microcontroller and DTMF decoder onboard the rover. When buttons are pressed on the calling phone, DTMF tones are generated and received by the rover, decoded into instructions for the microcontroller to drive motors accordingly. The synopsis outlines the motivation, objectives, methodology, expected timeline and potential impact of using mobile phone control for remote vehicles in academics and industry.
Smartphone controlled spy_robot_with_video_transmi
This document describes a smartphone-controlled spy robot with video transmission and object collection capabilities. The robot uses an Arduino microcontroller interfaced with an HC-05 Bluetooth module to receive control commands from an Android smartphone app over Bluetooth. It has a camera for live video streaming and a servo-controlled "hand" for collecting and holding objects. The robot is designed to be remotely controlled and perform surveillance tasks while remaining hidden from detection within the Bluetooth network range.
Mobile controlled robot using bluetooth module (HC-005)
This is a research paper on mobile control robot using bluetooth module. It contains introduction, list of components used, block diagram , circuit diagram and conclusion.
Autonomous Campus Tour Guide Robot by using Ultrasonic Range Sensors and QR c...
This undertaking depends on QR (Quick Response) codes to give area references to portable robots. The versatile robot is outfitted with a Smartphone that is modified to identify and peruse data on QR codes that are deliberately put in the working condition of the robot. The portable robot can play out the self-governing keep running all through the guide course by utilizing ongoing QR code acknowledgment. The lab data on QR code is played to the guests utilizing Text-to-Speech gave through Android gadget. Ultrasonic range sensors which can distinguish articles and measure separations with high precision are utilized to actualize the divider following and obstruction evasion practices. The gathered sonar data by ultrasonic range sensors is processed by a microcontroller that self-sufficiently controls the tour guide robot. A calculation dependent on the Proportional-integral-derivative (PID) control is applied to the tour guide robot to perform increasingly precise robot movement control. A Bluetooth innovation is utilized to send flag to the Arduino from the Smartphone to operate the tour guide robot remotely.
VOICE CONTROLED AUTOMATIC INTERACTIVE VEHICLE.pptx
The Internet of Things and AI is a developing trend in technology that is already changing the world in
which we live by interconnecting physical objects that can collect or transmit information to us and to each
other. In this work, an application of the use of the IoT is presented by the development of a semiautonomous Robot using off-the-shelf home automation(smart) components. The system is composed of
hardware and software elements that are integrated into a self-propelled scaled down version of robotic
vehicle various applets in the application were enabled to be triggered using the self made voice assistant
The robot can be controlled through voice commands and is capable of basic activities. The ultrasonic
sensors installed on the robot proved their reliability by stopping the vehicle at an average distance of 7.3
cm away from different obstacles. This work contributes to existing knowledge on the Internet of Things
and AI by providing a demonstration of a semi-autonomous robot capable of cloud-based control both
with voice commands and cloud-based activities.
Multipurpose Warfield Surveillance Robot Using IoT
The document describes the design of a multipurpose surveillance robot using IoT. Some key points:
- The robot can be operated remotely using an Android app for real-time video streaming and control. It is intended for surveillance in war zones to minimize risks to soldiers.
- The design uses a Raspberry Pi 4 for wireless connectivity, a camera, and motors controlled by an L293D driver. It can move forward, backward, left and right under user commands sent via the Android app.
- The objectives are to use the robot for reconnaissance, bomb detection, and border surveillance to enhance security and reduce casualties for military personnel.
- The methodology uses the Raspberry Pi, USB camera,
Robo wireless controll
This document presents a Bluetooth controlled robot project. It includes an introduction, block diagram, overview, components used including the 8051 microcontroller, Bluetooth module, motors, and power supply. It also discusses the software used, Kiel, to program the microcontroller. The robot can be controlled remotely via an Android app and Bluetooth. It has applications in surveillance, bomb disposal, and other fields. The robot is small, inexpensive, energy efficient, and can operate from a long distance via remote control.
DTMF Controlled Robot Car WITHOUT using MICROCONTROLLER
This document describes a DTMF controlled robot project created by a team of students under the guidance of O.SRIKANTH. The robot uses two mobile phones, where one phone calls the other phone mounted on the robot to control it through DTMF tones. When buttons are pressed on the calling phone, corresponding tones are received by the robot phone and processed by a DTMF decoder chip to operate motors via a motor driver chip. Potential applications are discussed along with advantages of long distance control without coding and disadvantages of requiring a camera and incurring call charges.
Running characters led matrix display
ECE Projects for Final Year, Embedded Projects in Bangalore, Engineering Projects in Bangalore, Final Year Projects in Vijayanagar, ECE projects in Vijayanagar, Embedded Project institute in Vijayanagar
Pc based electrical appliance control system
ECE Projects for Final Year, Embedded Projects in Bangalore, Engineering Projects in Bangalore, Final Year Projects in Vijayanagar, ECE projects in Vijayanagar, Embedded Project institute in Vijayanagar
More Related Content
Similar to Dtmf controlled bomb detecting robot
Dtmf based human less boat control for oceanic research applications
This project describes a prototype boat that can be remotely controlled using Dual-Tone Multi-Frequency (DTMF) signals. The boat is controlled by pressing number keys on a mobile phone, which sends DTMF signals that are received and decoded by a DTMF decoder connected to an AT89S52 microcontroller. The microcontroller then controls motors through an H-bridge circuit to move the boat forward, backward, left, or right. This remote controlled boat design could be useful for applications like mines detection and oceanographic research.
BEST FINAL YEAR PROJECT CENTER CHENNAI MAASTECH-BEST BEST PROJECTS
BEST FINAL YEAR PROJECT CENTER CHENNAI MAASTECH-BEST BEST PROJECTS/COCHIN,HYDERABAD, BANGALORE,TAMILNADU..
Abstract:
This project aims at designing a robot, which has freedom of movement along all the 3 axes and its motion is controlled by means of wheels. The user can control the movements using a Cellphone from a remote place. The system is made more useful by introducing artificial intelligence to it. By artificial intelligence, we mean designing the robot is such a manner that in situation which require decision making, the robot identifies the presence of the obstacle, alerts the user and moreover awaits instruction from the user for the further action. Other condition, which the robot can determine, is presence of fire. I.e., high temperature and presence of metals in vicinity.
BEST ROBOTIC PROJECT CENTER CHENNAI-ROBOTIC PROJECT CENTER MAASTECH
BEST ROBOTIC PROJECT CENTER CHENNAI-ROBOTIC PROJECT CENTER MAASTECH..............
Introduction
A robot is an electro-mechanical device that can perform autonomous or preprogrammed tasks. A robot may act under the direct control of a human (eg. the robotic arm of the space shuttle) or autonomously under the control of a programmed computer. Robots may be used to perform tasks that are too dangerous or difficult for humans to implement directly (e.g. nuclear waste clean up) or may be used to automate repetitive tasks that can be performed with more precision by a robot than by the employment of a human (e.g. automobile production.)
Smart phone based robotic control for surveillance applications
Abstract The robotics and automation industry which is ruled the sectors from manufacturing to household entertainments. It is widely used because of its simplicity and ability to modify to meet changes of needs. The project is designed to develop a robotic vehicle using android application for remote operation attached with wireless camera for monitoring purpose. The robot along with camera can wirelessly transmit real time video with night vision capabilities. This is kind of robot can be helpful for spying purpose in war fields. Keywords: Android, Robot, Bluetooth, Robotic control
Smart phone based robotic control for surveillance applications
IJRET : International Journal of Research in Engineering and Technology is an international peer reviewed, online journal published by eSAT Publishing House for the enhancement of research in various disciplines of Engineering and Technology. The aim and scope of the journal is to provide an academic medium and an important reference for the advancement and dissemination of research results that support high-level learning, teaching and research in the fields of Engineering and Technology. We bring together Scientists, Academician, Field Engineers, Scholars and Students of related fields of Engineering and Technology
Project Summary
This document describes 4 projects:
1. An electronic vending machine that allows customers to order items from a shop without visiting in person or using the internet by authenticating via RFID and selecting items on a graphical LCD. Orders are sent via GSM to the customer and shop for delivery.
2. An autonomous vehicle parking system that uses sensors to detect an empty parking space and perpendicularly parks the vehicle without human intervention to reduce accidents and provide driver comfort.
3. A line follower robot that uses IR sensors and a microcontroller to follow a black line on the ground and stop when it detects obstacles. This project provided practical experience with microcontrollers.
4. A case study of OTDR instruments
ROBOTICS PROJECT ABSTRACT:Cellphone controlled3axisrobot
MAASTECH OFFER ROBOTICS PROJECTS....
Cell Phone Controlled Three Axis Robot With Artificial Intelligence
Introduction
A robot is an electro-mechanical device that can perform autonomous or preprogrammed tasks. A robot may act under the direct control of a human (eg. the robotic arm of the space shuttle) or autonomously under the control of a programmed computer. Robots may be used to perform tasks that are too dangerous or difficult for humans to implement directly (e.g. nuclear waste clean up) or may be used to automate repetitive tasks that can be performed with more precision by a robot than by the employment of a human (e.g. automobile production.)
An Improved Approach for Monitoring and Controlling of Flyovers and Bridges U...
An Improved Approach for Monitoring and Controlling of Flyovers and Bridges U...IJCSIS Research Publications
In modern technology robotics method may be applied to do our manual task. If robots are to become as common at household people will need to control and monitor them easily. In this aspect we have proposed, desired and designed a robot which can be controlled by mobile phones. Through which we can call for some emergency situations for Fire brigade, Law enforcement agency (Police, Army), Natural Calamity, Area Guard so on. On Mobile phone robot we have mounted a 9V battery as the power supply for the circuit and the motors. When the user calls the mobile the call is received by auto-answer mode. As the call continues when the user presses a button on his handset the tone that is generated is decoded by the DTMF decoder and the command is passed to the microcontroller which is pre-programmed. The Microcontroller then passes the command to the motor driver ICs for motion.it can also be used in reconnaissance or surveillance and anywhere there is the service provider tower of the connection provided that is mounted on the robot and Mostly The robot is small in size and it’s cost is also reasonable.An improved approach_for_monitoring_and
In modern technology robotics method may be applied to do our manual task. If robots are to become as common at
household people will need to control and monitor them easily. In this aspect we have proposed, desired and designed a robot which
can be controlled by mobile phones. Through which we can call for some emergency situations for Fire brigade, Law enforcement
agency (Police, Army), Natural Calamity, Area Guard so on. On Mobile phone robot we have mounted a 9V battery as the power
supply for the circuit and the motors. When the user calls the mobile the call is received by auto-answer mode. As the call continues
when the user presses a button on his handset the tone that is generated is decoded by the DTMF decoder and the command is passed
to the microcontroller which is pre-programmed. The Microcontroller then passes the command to the motor driver ICs for
motion.it can also be used in reconnaissance or surveillance and anywhere there is the service provider tower of the connection
provided that is mounted on the robot and Mostly The robot is small in size and it’s cost is also reasonable.
Robotic Soldier with EM Gun using Bluetooth Module
Need for security is growing day by day due to enormous development in the field of technology, but man wants to achieve this security at the minimum cost and minimum risk to human life. This is the factor which has encouraged us to develop this project which can achieve security at minimum risk to human life and at minimum cost. Here instead of exposing the soldier to do the hazardous job such as dangerous gas or hostile environment detection we have designed a machine which will do the same job more efficiently. This robot will be self-sufficient to sense the temperature of surrounding, and detecting if any obstacles are there at a certain distance depends on that robot guiding itself using the efficient algorithms and proper sensors.
IRJET - Mobile Controlled Robotic Car using DTMF
This document describes a mobile controlled robotic car that uses Dual Tone Multi Frequency (DTMF) technology. DTMF allows the robotic car to be controlled by phone. The system includes a microcontroller, DTMF decoder, motor driver, and DC motors. When buttons are pressed on the phone, corresponding DTMF tones are sent to the robotic car. The DTMF decoder converts the tones to binary for the microcontroller. The microcontroller then controls the motor driver and DC motors to move the car forward, backward, left, or right depending on the button pressed. This overcomes limitations of traditional radio frequency control, providing longer range and ability to control from any phone.
Robotic Soldier with EM Gun using Bluetooth Module
Need for security is growing day by day due to enormous development in the field of technology, but man wants to achieve this security at the minimum cost and minimum risk to human life. This is the factor which has encouraged us to develop this project which can achieve security at minimum risk to human life and at minimum cost. Here instead of exposing the soldier to do the hazardous job such as dangerous gas or hostile environment detection we have designed a machine which will do the same job more efficiently. This robot will be self-sufficient to sense the temperature of surrounding, and detecting if any obstacles are there at a certain distance depends on that robot guiding itself using the efficient algorithms and proper sensors.
Cell phone operated robot synopsis
This document provides a synopsis for a project titled "Cell Phone Operated Land Rover". The project aims to control a land rover using a mobile phone. A mobile phone would be connected to a microcontroller and DTMF decoder onboard the rover. When buttons are pressed on the calling phone, DTMF tones are generated and received by the rover, decoded into instructions for the microcontroller to drive motors accordingly. The synopsis outlines the motivation, objectives, methodology, expected timeline and potential impact of using mobile phone control for remote vehicles in academics and industry.
Smartphone controlled spy_robot_with_video_transmi
This document describes a smartphone-controlled spy robot with video transmission and object collection capabilities. The robot uses an Arduino microcontroller interfaced with an HC-05 Bluetooth module to receive control commands from an Android smartphone app over Bluetooth. It has a camera for live video streaming and a servo-controlled "hand" for collecting and holding objects. The robot is designed to be remotely controlled and perform surveillance tasks while remaining hidden from detection within the Bluetooth network range.
Mobile controlled robot using bluetooth module (HC-005)
This is a research paper on mobile control robot using bluetooth module. It contains introduction, list of components used, block diagram , circuit diagram and conclusion.
Autonomous Campus Tour Guide Robot by using Ultrasonic Range Sensors and QR c...
This undertaking depends on QR (Quick Response) codes to give area references to portable robots. The versatile robot is outfitted with a Smartphone that is modified to identify and peruse data on QR codes that are deliberately put in the working condition of the robot. The portable robot can play out the self-governing keep running all through the guide course by utilizing ongoing QR code acknowledgment. The lab data on QR code is played to the guests utilizing Text-to-Speech gave through Android gadget. Ultrasonic range sensors which can distinguish articles and measure separations with high precision are utilized to actualize the divider following and obstruction evasion practices. The gathered sonar data by ultrasonic range sensors is processed by a microcontroller that self-sufficiently controls the tour guide robot. A calculation dependent on the Proportional-integral-derivative (PID) control is applied to the tour guide robot to perform increasingly precise robot movement control. A Bluetooth innovation is utilized to send flag to the Arduino from the Smartphone to operate the tour guide robot remotely.
VOICE CONTROLED AUTOMATIC INTERACTIVE VEHICLE.pptx
The Internet of Things and AI is a developing trend in technology that is already changing the world in
which we live by interconnecting physical objects that can collect or transmit information to us and to each
other. In this work, an application of the use of the IoT is presented by the development of a semiautonomous Robot using off-the-shelf home automation(smart) components. The system is composed of
hardware and software elements that are integrated into a self-propelled scaled down version of robotic
vehicle various applets in the application were enabled to be triggered using the self made voice assistant
The robot can be controlled through voice commands and is capable of basic activities. The ultrasonic
sensors installed on the robot proved their reliability by stopping the vehicle at an average distance of 7.3
cm away from different obstacles. This work contributes to existing knowledge on the Internet of Things
and AI by providing a demonstration of a semi-autonomous robot capable of cloud-based control both
with voice commands and cloud-based activities.
Multipurpose Warfield Surveillance Robot Using IoT
The document describes the design of a multipurpose surveillance robot using IoT. Some key points:
- The robot can be operated remotely using an Android app for real-time video streaming and control. It is intended for surveillance in war zones to minimize risks to soldiers.
- The design uses a Raspberry Pi 4 for wireless connectivity, a camera, and motors controlled by an L293D driver. It can move forward, backward, left and right under user commands sent via the Android app.
- The objectives are to use the robot for reconnaissance, bomb detection, and border surveillance to enhance security and reduce casualties for military personnel.
- The methodology uses the Raspberry Pi, USB camera,
Robo wireless controll
This document presents a Bluetooth controlled robot project. It includes an introduction, block diagram, overview, components used including the 8051 microcontroller, Bluetooth module, motors, and power supply. It also discusses the software used, Kiel, to program the microcontroller. The robot can be controlled remotely via an Android app and Bluetooth. It has applications in surveillance, bomb disposal, and other fields. The robot is small, inexpensive, energy efficient, and can operate from a long distance via remote control.
DTMF Controlled Robot Car WITHOUT using MICROCONTROLLER
This document describes a DTMF controlled robot project created by a team of students under the guidance of O.SRIKANTH. The robot uses two mobile phones, where one phone calls the other phone mounted on the robot to control it through DTMF tones. When buttons are pressed on the calling phone, corresponding tones are received by the robot phone and processed by a DTMF decoder chip to operate motors via a motor driver chip. Potential applications are discussed along with advantages of long distance control without coding and disadvantages of requiring a camera and incurring call charges.
Similar to Dtmf controlled bomb detecting robot (20)
Dtmf based human less boat control for oceanic research applications
Dtmf based human less boat control for oceanic research applications
BEST FINAL YEAR PROJECT CENTER CHENNAI MAASTECH-BEST BEST PROJECTS
BEST FINAL YEAR PROJECT CENTER CHENNAI MAASTECH-BEST BEST PROJECTS
BEST ROBOTIC PROJECT CENTER CHENNAI-ROBOTIC PROJECT CENTER MAASTECH
BEST ROBOTIC PROJECT CENTER CHENNAI-ROBOTIC PROJECT CENTER MAASTECH
Smart phone based robotic control for surveillance applications
Smart phone based robotic control for surveillance applications
Smart phone based robotic control for surveillance applications
Smart phone based robotic control for surveillance applications
ROBOTICS PROJECT ABSTRACT:Cellphone controlled3axisrobot
ROBOTICS PROJECT ABSTRACT:Cellphone controlled3axisrobot
An Improved Approach for Monitoring and Controlling of Flyovers and Bridges U...
An Improved Approach for Monitoring and Controlling of Flyovers and Bridges U...
Robotic Soldier with EM Gun using Bluetooth Module
Robotic Soldier with EM Gun using Bluetooth Module
Robotic Soldier with EM Gun using Bluetooth Module
Robotic Soldier with EM Gun using Bluetooth Module
Smartphone controlled spy_robot_with_video_transmi
Smartphone controlled spy_robot_with_video_transmi
Mobile controlled robot using bluetooth module (HC-005)
Mobile controlled robot using bluetooth module (HC-005)
Autonomous Campus Tour Guide Robot by using Ultrasonic Range Sensors and QR c...
Autonomous Campus Tour Guide Robot by using Ultrasonic Range Sensors and QR c...
VOICE CONTROLED AUTOMATIC INTERACTIVE VEHICLE.pptx
VOICE CONTROLED AUTOMATIC INTERACTIVE VEHICLE.pptx
Multipurpose Warfield Surveillance Robot Using IoT
Multipurpose Warfield Surveillance Robot Using IoT
DTMF Controlled Robot Car WITHOUT using MICROCONTROLLER
DTMF Controlled Robot Car WITHOUT using MICROCONTROLLER
More from Logic Mind Technologies
Running characters led matrix display
ECE Projects for Final Year, Embedded Projects in Bangalore, Engineering Projects in Bangalore, Final Year Projects in Vijayanagar, ECE projects in Vijayanagar, Embedded Project institute in Vijayanagar
Pc based electrical appliance control system
ECE Projects for Final Year, Embedded Projects in Bangalore, Engineering Projects in Bangalore, Final Year Projects in Vijayanagar, ECE projects in Vijayanagar, Embedded Project institute in Vijayanagar
Mobile operated landrover using dtmf decoder
ECE Projects for Final Year, Embedded Projects in Bangalore, Engineering Projects in Bangalore, Final Year Projects in Vijayanagar, ECE projects in Vijayanagar, Embedded Project institute in Vijayanagar
Lcd based voting machine using 8051 family microcontroller
ECE Projects for Final Year, Embedded Projects in Bangalore, Engineering Projects in Bangalore, Final Year Projects in Vijayanagar, ECE projects in Vijayanagar, Embedded Project institute in Vijayanagar
Intelligent alcohol detection system for car
ECE Projects for Final Year, Embedded Projects in Bangalore, Engineering Projects in Bangalore, Final Year Projects in Vijayanagar, ECE projects in Vijayanagar, Embedded Project institute in Vijayanagar
Home automation using dtmf decoder
ECE Projects for Final Year, Embedded Projects in Bangalore, Engineering Projects in Bangalore, Final Year Projects in Vijayanagar, ECE projects in Vijayanagar, Embedded Project institute in Vijayanagar
Green house monitoring and control
ECE Projects for Final Year, Embedded Projects in Bangalore, Engineering Projects in Bangalore, Final Year Projects in Vijayanagar, ECE projects in Vijayanagar, Embedded Project institute in Vijayanagar
Embedded real time clock based industrial devices control system
This document describes an embedded real-time clock based industrial device control system developed by Logic Mind Technologies. The system uses a PIC microcontroller interfaced with a DS1307 real-time clock chip to programmatically switch on heavy machinery and devices only during needed time periods, in order to reduce electrical energy wastage. A 3V battery is connected to the real-time clock to avoid disturbances from power failures. The system provides control switches to enter required timings and displays the alarm times and current time on a 2x16 LCD. It was developed as a solution for industrial sites where machinery operates and wastes power during time periods with low worker activity.
Embedded based patient heartbeat and temperature monitoring system
This document describes an embedded system for real-time patient monitoring of heartbeat and temperature. The system uses biosensors and a PIC16F877A microcontroller to continuously monitor patients' vital signs. The microcontroller analyzes the sensor data and stores results in a database. It can also trigger an alarm if any abnormal readings are detected. The proposed system aims to offer more powerful and flexible monitoring than current wired solutions, supporting up to 20 patients with low-cost, low-power dual-mode monitoring in real-time. It uses MPLAB C software to implement the processes and discuss results.
Embedded based coin operated water vending machine
ECE Projects for Final Year, Embedded Projects in Bangalore, Engineering Projects in Bangalore, Final Year Projects in Vijayanagar, ECE projects in Vijayanagar, Embedded Project institute in Vijayanagar
Digital watt meter with current and voltage display
ECE Projects for Final Year, Embedded Projects in Bangalore, Engineering Projects in Bangalore, Final Year Projects in Vijayanagar, ECE projects in Vijayanagar, Embedded Project institute in Vijayanagar
Breake failure indicator for four wheelers
ECE Projects for Final Year, Embedded Projects in Bangalore, Engineering Projects in Bangalore, Final Year Projects in Vijayanagar, ECE projects in Vijayanagar, Embedded Project institute in Vijaynagar
Avr based smart electricity meter
ECE Projects for Final Year, Embedded Projects in Bangalore, Engineering Projects in Bangalore, Final Year Projects in Vijayanagar, ECE projects in Vijayanagar, Embedded Project institute in Vijaynagar
Automatic power cut and dialup in gas leakage detection
ECE Projects for Final Year, Embedded Projects in Bangalore, Engineering Projects in Bangalore, Final Year Projects in Vijayanagar, ECE projects in Vijayanagar, Embedded Project institute in Vijaynagar
Automatic energy managemet system
ECE Projects for Final Year, Embedded Projects in Bangalore, Engineering Projects in Bangalore, Final Year Projects in Vijayanagar, ECE projects in Vijayanagar, Embedded Project institute in Vijaynagar
Automatic energy managemet system
ECE Projects for Final Year, Embedded Projects in Bangalore, Engineering Projects in Bangalore, Final Year Projects in Vijayanagar, ECE projects in Vijayanagar, Embedded Project institute in Vijaynagar
A bi directional visitors counter
This document describes a bi-directional visitor counter circuit that uses infrared (IR) sensors to count the number of people entering and exiting a room. The circuit uses two sets of IR sensors with an IR LED and photo transistor at each end to detect movement. When a person passes through the sensor, it interrupts the IR light and the microcontroller detects the signal change and increases or decreases the count. The system displays the in and out counts on an LCD and can help monitor visitor numbers in places like auditoriums, halls, and museums without human intervention at a low cost.
More from Logic Mind Technologies (17)
Lcd based voting machine using 8051 family microcontroller
Lcd based voting machine using 8051 family microcontroller
Embedded real time clock based industrial devices control system
Embedded real time clock based industrial devices control system
Embedded based patient heartbeat and temperature monitoring system
Embedded based patient heartbeat and temperature monitoring system
Embedded based coin operated water vending machine
Embedded based coin operated water vending machine
Digital watt meter with current and voltage display
Digital watt meter with current and voltage display
Automatic power cut and dialup in gas leakage detection
Automatic power cut and dialup in gas leakage detection
Recently uploaded
Promoting Multilateral Cooperation for Sustainable Peatland management
Presented by Agus Julianto on GLF Peatlands 2024 - 360 Degree Approach to Improving Capacity of Multiple Stakeholders to Manage Peatland Sustainably
原版制作(Newcastle毕业证书)纽卡斯尔大学毕业证在读证明一模一样
学校原件一模一样【微信:741003700 】《(Newcastle毕业证书)纽卡斯尔大学毕业证》【微信:741003700 】学位证,留信认证(真实可查,永久存档)原件一模一样纸张工艺/offer、雅思、外壳等材料/诚信可靠,可直接看成品样本,帮您解决无法毕业带来的各种难题!外壳,原版制作,诚信可靠,可直接看成品样本。行业标杆!精益求精,诚心合作,真诚制作!多年品质 ,按需精细制作,24小时接单,全套进口原装设备。十五年致力于帮助留学生解决难题,包您满意。
本公司拥有海外各大学样板无数,能完美还原。
1:1完美还原海外各大学毕业材料上的工艺:水印,阴影底纹,钢印LOGO烫金烫银,LOGO烫金烫银复合重叠。文字图案浮雕、激光镭射、紫外荧光、温感、复印防伪等防伪工艺。材料咨询办理、认证咨询办理请加学历顾问Q/微741003700
【主营项目】
一.毕业证【q微741003700】成绩单、使馆认证、教育部认证、雅思托福成绩单、学生卡等!
二.真实使馆公证(即留学回国人员证明,不成功不收费)
三.真实教育部学历学位认证(教育部存档!教育部留服网站永久可查)
四.办理各国各大学文凭(一对一专业服务,可全程监控跟踪进度)
如果您处于以下几种情况:
◇在校期间,因各种原因未能顺利毕业……拿不到官方毕业证【q/微741003700】
◇面对父母的压力,希望尽快拿到;
◇不清楚认证流程以及材料该如何准备;
◇回国时间很长,忘记办理;
◇回国马上就要找工作,办给用人单位看;
◇企事业单位必须要求办理的
◇需要报考公务员、购买免税车、落转户口
◇申请留学生创业基金
留信网认证的作用:
1:该专业认证可证明留学生真实身份
2:同时对留学生所学专业登记给予评定
3:国家专业人才认证中心颁发入库证书
4:这个认证书并且可以归档倒地方
5:凡事获得留信网入网的信息将会逐步更新到个人身份内,将在公安局网内查询个人身份证信息后,同步读取人才网入库信息
6:个人职称评审加20分
7:个人信誉贷款加10分
8:在国家人才网主办的国家网络招聘大会中纳入资料,供国家高端企业选择人才
Global Peatlands Map and Hotspot Explanation Atlas
Presented by Alexandra Barthelmes at GLF Peatlands 2024 - The Global Peatlands Assessment: Mapping, Policy, and Action
ENVIRONMENT~ Renewable Energy Sources and their future prospects.
This presentation is for us to know that how our Environment need Attention for protection of our natural resources which are depleted day by day that's why we need to take time and shift our attention to renewable energy sources instead of non-renewable sources which are better and Eco-friendly for our environment. these renewable energy sources are so helpful for our planet and for every living organism which depends on environment.
How about Huawei mobile phone-www.cfye-commerce.shop
How about Huawei mobile phone-www.cfye-commerce.shop
Improving the Management of Peatlands and the Capacities of Stakeholders in I...
Improving the Management of Peatlands and the Capacities of Stakeholders in I...Global Landscapes Forum (GLF)
Presented by Sonya Dewi at GLF Peatlands 2024 - 360 Degree Approach to Improving Capacity of Multiple Stakeholders to Manage Peatland SustainablyEnhanced action and stakeholder engagement for sustainable peatland management
Enhanced action and stakeholder engagement for sustainable peatland managementGlobal Landscapes Forum (GLF)
Presented by Jan Peters at GLF Peatlands 2024 - The Global Peatlands Assessment: Mapping, Policy, and Action在线办理(lboro毕业证书)拉夫堡大学毕业证学历证书一模一样
学校原件一模一样【微信:741003700 】《(lboro毕业证书)拉夫堡大学毕业证学历证书》【微信:741003700 】学位证,留信认证(真实可查,永久存档)原件一模一样纸张工艺/offer、雅思、外壳等材料/诚信可靠,可直接看成品样本,帮您解决无法毕业带来的各种难题!外壳,原版制作,诚信可靠,可直接看成品样本。行业标杆!精益求精,诚心合作,真诚制作!多年品质 ,按需精细制作,24小时接单,全套进口原装设备。十五年致力于帮助留学生解决难题,包您满意。
本公司拥有海外各大学样板无数,能完美还原。
1:1完美还原海外各大学毕业材料上的工艺:水印,阴影底纹,钢印LOGO烫金烫银,LOGO烫金烫银复合重叠。文字图案浮雕、激光镭射、紫外荧光、温感、复印防伪等防伪工艺。材料咨询办理、认证咨询办理请加学历顾问Q/微741003700
【主营项目】
一.毕业证【q微741003700】成绩单、使馆认证、教育部认证、雅思托福成绩单、学生卡等!
二.真实使馆公证(即留学回国人员证明,不成功不收费)
三.真实教育部学历学位认证(教育部存档!教育部留服网站永久可查)
四.办理各国各大学文凭(一对一专业服务,可全程监控跟踪进度)
如果您处于以下几种情况:
◇在校期间,因各种原因未能顺利毕业……拿不到官方毕业证【q/微741003700】
◇面对父母的压力,希望尽快拿到;
◇不清楚认证流程以及材料该如何准备;
◇回国时间很长,忘记办理;
◇回国马上就要找工作,办给用人单位看;
◇企事业单位必须要求办理的
◇需要报考公务员、购买免税车、落转户口
◇申请留学生创业基金
留信网认证的作用:
1:该专业认证可证明留学生真实身份
2:同时对留学生所学专业登记给予评定
3:国家专业人才认证中心颁发入库证书
4:这个认证书并且可以归档倒地方
5:凡事获得留信网入网的信息将会逐步更新到个人身份内,将在公安局网内查询个人身份证信息后,同步读取人才网入库信息
6:个人职称评审加20分
7:个人信誉贷款加10分
8:在国家人才网主办的国家网络招聘大会中纳入资料,供国家高端企业选择人才
Optimizing Post Remediation Groundwater Performance with Enhanced Microbiolog...
Results of geophysics and pneumatic injection pilot tests during 2003 – 2007 yielded significant positive results for injection delivery design and contaminant mass treatment, resulting in permanent shut-down of an existing groundwater Pump & Treat system.
Accessible source areas were subsequently removed (2011) by soil excavation and treated with the placement of Emulsified Vegetable Oil EVO and zero-valent iron ZVI to accelerate treatment of impacted groundwater in overburden and weathered fractured bedrock. Post pilot test and post remediation groundwater monitoring has included analyses of CVOCs, organic fatty acids, dissolved gases and QuantArray® -Chlor to quantify key microorganisms (e.g., Dehalococcoides, Dehalobacter, etc.) and functional genes (e.g., vinyl chloride reductase, methane monooxygenase, etc.) to assess potential for reductive dechlorination and aerobic cometabolism of CVOCs.
In 2022, the first commercial application of MetaArray™ was performed at the site. MetaArray™ utilizes statistical analysis, such as principal component analysis and multivariate analysis to provide evidence that reductive dechlorination is active or even that it is slowing. This creates actionable data allowing users to save money by making important site management decisions earlier.
The results of the MetaArray™ analysis’ support vector machine (SVM) identified groundwater monitoring wells with a 80% confidence that were characterized as either Limited for Reductive Decholorination or had a High Reductive Reduction Dechlorination potential. The results of MetaArray™ will be used to further optimize the site’s post remediation monitoring program for monitored natural attenuation.
一比一原版(UMTC毕业证书)明尼苏达大学双城分校毕业证如何办理
原件一模一样【微信:6496090】【(UMTC毕业证书)明尼苏达大学双城分校毕业证成绩单学位证】【微信:6496090】(留信学历认证永久存档查询)采用学校原版纸张、特殊工艺完全按照原版一比一制作(包括:隐形水印,阴影底纹,钢印LOGO烫金烫银,LOGO烫金烫银复合重叠,文字图案浮雕,激光镭射,紫外荧光,温感,复印防伪)行业标杆!精益求精,诚心合作,真诚制作!多年品质 ,按需精细制作,24小时接单,全套进口原装设备,十五年致力于帮助留学生解决难题,业务范围有加拿大、英国、澳洲、韩国、美国、新加坡,新西兰等学历材料,包您满意。
◆◆◆◆◆ — — — — — — — — 【留学教育】留学归国服务中心 — — — — — -◆◆◆◆◆
【主营项目】
一.毕业证【微信:6496090】成绩单、使馆认证、教育部认证、雅思托福成绩单、学生卡等!
二.真实使馆公证(即留学回国人员证明,不成功不收费)
三.真实教育部学历学位认证(教育部存档!教育部留服网站永久可查)
四.办理各国各大学文凭(一对一专业服务,可全程监控跟踪进度)
如果您处于以下几种情况:
◇在校期间,因各种原因未能顺利毕业……拿不到官方毕业证【微信:6496090】
◇面对父母的压力,希望尽快拿到;
◇不清楚认证流程以及材料该如何准备;
◇回国时间很长,忘记办理;
◇回国马上就要找工作,办给用人单位看;
◇企事业单位必须要求办理的
◇需要报考公务员、购买免税车、落转户口
◇申请留学生创业基金
留信网认证的作用:
1:该专业认证可证明留学生真实身份
2:同时对留学生所学专业登记给予评定
3:国家专业人才认证中心颁发入库证书
4:这个认证书并且可以归档倒地方
5:凡事获得留信网入网的信息将会逐步更新到个人身份内,将在公安局网内查询个人身份证信息后,同步读取人才网入库信息
6:个人职称评审加20分
7:个人信誉贷款加10分→ 【关于价格问题(保证一手价格)
8:在国家人才网主办的国家网络招聘大会中纳入资料,供国家高端企业选择人才
选择实体注册公司办理,更放心,更安全!我们的承诺:可来公司面谈,可签订合同,会陪同客户一起到教育部认证窗口递交认证材料,客户在教育部官方认证查询网站查询到认证通过结果后付款,不成功不收费!
我们所定的价格是非常合理的,而且我们现在做得单子大多数都是代理和回头客户介绍的所以一般现在有新的单子 我给客户的都是第一手的代理价格,因为我想坦诚对待大家 不想跟大家在价格方面浪费时间
对于老客户或者被老客户介绍过来的朋友,我们都会适当给一些优惠。
学历顾问:微信:6496090
Peatlands of Latin America and the Caribbean
Presented by The Global Peatlands Assessment: Mapping, Policy, and Action at GLF Peatlands 2024 - The Global Peatlands Assessment: Mapping, Policy, and Action
Wildlife-AnIntroduction.pdf so that you know more about our environment
All about wildlife, if you are fond of animals and wildlife then do follow us for more content like this
Kinetic studies on malachite green dye adsorption from aqueous solutions by A...
Kinetic studies on malachite green dye adsorption from aqueous solutions by A...Open Access Research Paper
Water polluted by dyestuffs compounds is a global threat to health and the environment; accordingly, we prepared a green novel sorbent chemical and Physical system from an algae, chitosan and chitosan nanoparticle and impregnated with algae with chitosan nanocomposite for the sorption of Malachite green dye from water. The algae with chitosan nanocomposite by a simple method and used as a recyclable and effective adsorbent for the removal of malachite green dye from aqueous solutions. Algae, chitosan, chitosan nanoparticle and algae with chitosan nanocomposite were characterized using different physicochemical methods. The functional groups and chemical compounds found in algae, chitosan, chitosan algae, chitosan nanoparticle, and chitosan nanoparticle with algae were identified using FTIR, SEM, and TGADTA/DTG techniques. The optimal adsorption conditions, different dosages, pH and Temperature the amount of algae with chitosan nanocomposite were determined. At optimized conditions and the batch equilibrium studies more than 99% of the dye was removed. The adsorption process data matched well kinetics showed that the reaction order for dye varied with pseudo-first order and pseudo-second order. Furthermore, the maximum adsorption capacity of the algae with chitosan nanocomposite toward malachite green dye reached as high as 15.5mg/g, respectively. Finally, multiple times reusing of algae with chitosan nanocomposite and removing dye from a real wastewater has made it a promising and attractive option for further practical applications.
Peatland Management in Indonesia, Science to Policy and Knowledge Education
Peatland Management in Indonesia, Science to Policy and Knowledge EducationGlobal Landscapes Forum (GLF)
Presented by Feri Johana at GLF Peatlands 2024 - 360 Degree Approach to Improving Capacity of Multiple Stakeholders to Manage Peatland SustainablyOverview of the Global Peatlands Assessment
Presented by Patrick Scheel at GLF Peatlands 2024 - The Global Peatlands Assessment: Mapping, Policy, and Action
Improving the viability of probiotics by encapsulation methods for developmen...
Improving the viability of probiotics by encapsulation methods for developmen...Open Access Research Paper
The popularity of functional foods among scientists and common people has been increasing day by day. Awareness and modernization make the consumer think better regarding food and nutrition. Now a day’s individual knows very well about the relation between food consumption and disease prevalence. Humans have a diversity of microbes in the gut that together form the gut microflora. Probiotics are the health-promoting live microbial cells improve host health through gut and brain connection and fighting against harmful bacteria. Bifidobacterium and Lactobacillus are the two bacterial genera which are considered to be probiotic. These good bacteria are facing challenges of viability. There are so many factors such as sensitivity to heat, pH, acidity, osmotic effect, mechanical shear, chemical components, freezing and storage time as well which affects the viability of probiotics in the dairy food matrix as well as in the gut. Multiple efforts have been done in the past and ongoing in present for these beneficial microbial population stability until their destination in the gut. One of a useful technique known as microencapsulation makes the probiotic effective in the diversified conditions and maintain these microbe’s community to the optimum level for achieving targeted benefits. Dairy products are found to be an ideal vehicle for probiotic incorporation. It has been seen that the encapsulated microbial cells show higher viability than the free cells in different processing and storage conditions as well as against bile salts in the gut. They make the food functional when incorporated, without affecting the product sensory characteristics.
Evolving Lifecycles with High Resolution Site Characterization (HRSC) and 3-D...
The incorporation of a 3DCSM and completion of HRSC provided a tool for enhanced, data-driven, decisions to support a change in remediation closure strategies. Currently, an approved pilot study has been obtained to shut-down the remediation systems (ISCO, P&T) and conduct a hydraulic study under non-pumping conditions. A separate micro-biological bench scale treatability study was competed that yielded positive results for an emerging innovative technology. As a result, a field pilot study has commenced with results expected in nine-twelve months. With the results of the hydraulic study, field pilot studies and an updated risk assessment leading site monitoring optimization cost lifecycle savings upwards of $15MM towards an alternatively evolved best available technology remediation closure strategy.
Recently uploaded (20)
world-environment-day-2024-240601103559-14f4c0b4.pptx
world-environment-day-2024-240601103559-14f4c0b4.pptx
Promoting Multilateral Cooperation for Sustainable Peatland management
Promoting Multilateral Cooperation for Sustainable Peatland management
Global Peatlands Map and Hotspot Explanation Atlas
Global Peatlands Map and Hotspot Explanation Atlas
ENVIRONMENT~ Renewable Energy Sources and their future prospects.
ENVIRONMENT~ Renewable Energy Sources and their future prospects.
How about Huawei mobile phone-www.cfye-commerce.shop
How about Huawei mobile phone-www.cfye-commerce.shop
Improving the Management of Peatlands and the Capacities of Stakeholders in I...
Improving the Management of Peatlands and the Capacities of Stakeholders in I...
Enhanced action and stakeholder engagement for sustainable peatland management
Enhanced action and stakeholder engagement for sustainable peatland management
Optimizing Post Remediation Groundwater Performance with Enhanced Microbiolog...
Optimizing Post Remediation Groundwater Performance with Enhanced Microbiolog...
Wildlife-AnIntroduction.pdf so that you know more about our environment
Wildlife-AnIntroduction.pdf so that you know more about our environment
Kinetic studies on malachite green dye adsorption from aqueous solutions by A...
Kinetic studies on malachite green dye adsorption from aqueous solutions by A...
Peatland Management in Indonesia, Science to Policy and Knowledge Education
Peatland Management in Indonesia, Science to Policy and Knowledge Education
Improving the viability of probiotics by encapsulation methods for developmen...
Improving the viability of probiotics by encapsulation methods for developmen...
Evolving Lifecycles with High Resolution Site Characterization (HRSC) and 3-D...
Evolving Lifecycles with High Resolution Site Characterization (HRSC) and 3-D...
Dtmf controlled bomb detecting robot
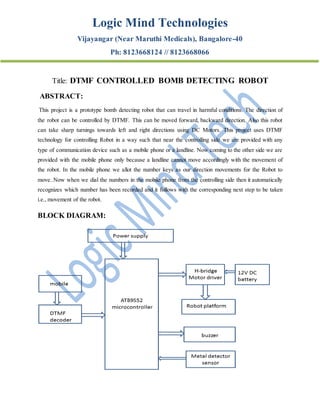
- 1. Logic Mind Technologies Vijayangar (Near Maruthi Medicals), Bangalore-40 Ph: 8123668124 // 8123668066 Title: DTMF CONTROLLED BOMB DETECTING ROBOT ABSTRACT: This project is a prototype bomb detecting robot that can travel in harmful conditions. The direction of the robot can be controlled by DTMF. This can be moved forward, backward direction. Also this robot can take sharp turnings towards left and right directions using DC Motors. This project uses DTMF technology for controlling Robot in a way such that near the controlling side we are provided with any type of communication device such as a mobile phone or a landline. Now coming to the other side we are provided with the mobile phone only because a landline cannot move accordingly with the movement of the robot. In the mobile phone we allot the number keys as our direction movements for the Robot to move..Now when we dial the numbers in the mobile phone from the controlling side then it automatically recognizes which number has been recorded and it follows with the corresponding next step to be taken i.e., movement of the robot. BLOCK DIAGRAM:
- 2. PROPOSED SYSTEM: This Project uses DTMF Decoder which is controlled by a battery and in turn is connected to the mobile phone. This is controlled by the AT89S52 controller and is again connected to the driver circuit for driving the motor. This project uses battery. This project is much useful for mines detection and Oceanic Research Applications. ADVANTAGES: Effective control of dc motor Dc motor control using mobile phone. Increases power efficiency. Power wastage is reduced APPLICATIONS: Small scale industries. Home appliances Robot control Plant irrigation PROJECT FLOW: First Review: Literature Survey Paper Explanation Design of Project Project Enhancement explanation
- 3. Second Review: Implementing 40% of Base Paper Third Review Implementing Remaining 60% of Base Paper with Future Enhancement (Modification) For More Details please contact Logic Mind Technologies Vijayangar (Near Maruthi Medicals), Bangalore-40 Ph: 8123668124 // 8123668066 Mail: logicmindtech@gmail.com