![ISA Transactions 51 (2012) 153–162
Contents lists available at SciVerse ScienceDirect
ISA Transactions
journal homepage: www.elsevier.com/locate/isatrans
Event-triggered control design of linear networked systems with quantizations
Songlin Hu, Dong Yue∗
Department of Control Science and Engineering, Huazhong University of Science and Technology, Wuhan, 430074, Hubei, PR China
a r t i c l e i n f o
Article history:
Received 1 June 2011
Received in revised form
27 August 2011
Accepted 10 September 2011
Available online 11 October 2011
Keywords:
Quantization
Event-triggering scheme
Networked control systems
Lyapunov functional
Linear matrix inequality
a b s t r a c t
This paper is concerned with the control design problem of event-triggered networked systems with
both state and control input quantizations. Firstly, an innovative delay system model is proposed that
describes the network conditions, state and control input quantizations, and event-triggering mechanism
in a unified framework. Secondly, based on this model, the criteria for the asymptotical stability analysis
and control synthesis of event-triggered networked control systems are established in terms of linear
matrix inequalities (LMIs). Simulation results are given to illustrate the effectiveness of the proposed
method.
Crown Copyright © 2011 Published by Elsevier Ltd on behalf of ISA. All rights reserved.
1. Introduction
Networked control systems (NCSs) have received considerable
attention in recent years because of its increasing demand in
networked systems for manufacturing, automation, industrial
process control, robotics, and many other applications [1].
However, the insertion of communication networks in the
feedback control loops makes the analysis and synthesis of NCSs
more complex than before [2]. The primary challenges include
network-induced delays, packet dropouts and wrong packet
sequences, which can deteriorate the performance of NCSs and
can even destabilize the systems. So far, much effort has been
devoted to modeling, analysis, and design of NCSs in the presence
of network-induced delays, packet dropouts and disorder, see, for
example, [2–14] and the references therein.
As is well known, network-induced delays, packet dropouts and
disorder are mainly caused by the limited network bandwidth.
Therefore it is significant to develop methods that more effec-
tively use the limited bandwidth available for transmitting state
information so as to counteract the effects of network-induced
delays, packet dropouts and disorder. To overcome this problem,
quantization in control systems has recently become an active
research topic. The need for quantization arises when digital net-
works are part of the feedback loop. Until now, quantization prob-
lems have been studied by many researchers for linear systems
∗ Corresponding author.
E-mail address: medongy@vip.163.com (D. Yue).
or nonlinear systems with quantized state and/or quantized con-
trol input. Specifically, in [15], the quadratic stabilization prob-
lem was studied for linear SISO systems with state quantization
by using the Lyapunov function. The problem of stabilizing a non-
linear continuous-time system with state quantization was stud-
ied in [16] by applying Input-to-State Stability (ISS) analysis. The
global asymptotic stabilization of continuous-time linear and non-
linear systems subject to quantization (including state, measured
output, and control input quantizations) was thoroughly studied
in [17] by using Lyapunov stability theory, hybrid systems theory,
and input-to-state stability analysis. In [18], the quantized state
feedback stabilization problem was studied for MIMO systems
by using a sector bound approach and the linear matrix inequal-
ity technique. Considering the network-induced delays and data
packet dropouts, the guaranteed cost control of continuous-time
linear systems over networks with state and control input quanti-
zations was studied in [19]. A networked H∞ control problem for
continuous-time linear systems with state quantization was ad-
dressed in [20]. The quantized H∞ control design for discrete-time
NCSs with state and input quantizations was investigated in [21].
More recently, an alternative approach to minimize the use
of the communication resources is based on an event-triggering
scheme. The representative works [22–26] show that event-
triggering can largely reduce the sampling rates in the single
processor systems, compared with the periodic case. It is because
the system can adaptively adjust the rates in a certain way
dependent on the current state information within the system.
This leads to the sporadic invocation of control tasks, thus leaving
more time available for other non-control related tasks to be
invoked. One thing worth mentioning is that, the biggest difference
between the previous quantized control problem and the present
0019-0578/$ – see front matter Crown Copyright © 2011 Published by Elsevier Ltd on behalf of ISA. All rights reserved.
doi:10.1016/j.isatra.2011.09.002](https://image.slidesharecdn.com/event-triggeredcontroldesignoflinearnetworkedsystemswithquantizations-160729200827/85/Event-triggered-control-design-of-linear-networked-systems-with-quantizations-1-320.jpg)
![154 S. Hu, D. Yue / ISA Transactions 51 (2012) 153–162
quantization issue is that the effect of quantization is now
considered in the context of event-triggered networked systems.
To the best of the authors’ knowledge, up to now, little work
has been found in the open literature on co-design approaches to
NCSs with simultaneous consideration of network-induced delays,
signal quantizations (both state and control input), and event-
triggering schemes. This motivates the research of this work.
In this paper, by using a Lyapunov functional and a convex
combination technique, we investigate the control design problem
for uncertain event-triggered NCSs with quantizations, where
the effects of network-induced delays, state and control input
quantizations, and event-triggering schemes are involved in a
unified framework. Here, we consider the case that both the
quantizers (shown in Fig. 1) are static and parameter uncertainty
is norm-bounded. Firstly, based on a novel interval analysis
technique, the closed-loop feedback NCS is modeled as a new
delay model with simultaneous consideration of network-induced
delays, both state and input quantizations, and an event-triggering
scheme. Secondly, by using the Lyapunov–Krasovskii functional,
new sufficient conditions that guarantee the asymptotical stability
of the closed-loop NCSs are established in terms of LMIs. Moreover,
the explicit expression of feedback gain is also derived with
integration of signal quantizations, event-triggering, and network-
induced delays, which is the main difference between the present
paper and existing works such as [25]. Simulation results are
presented to demonstrate the effectiveness of the proposed
method.
Notations: Rn
and Z+
denote the n-dimensional Euclidean
space, positive integer set, respectively. Rm×n
is the set of m × n
real matrices. Sym {X} denotes the expression XT
+ X. In denotes
the n × n identity matrix. The notation X > 0 (respectively,
X ≥ 0) denotes a real symmetric positive definite (positive semi-
definite). In symmetric block matrices, ‘‘*’’ is used as ellipsis for
terms induced by symmetry, diag {· · ·} denotes the block-diagonal
matrix. Matrices, if not explicitly stated, are assumed to have
appropriate dimensions.
2. Problem formulation
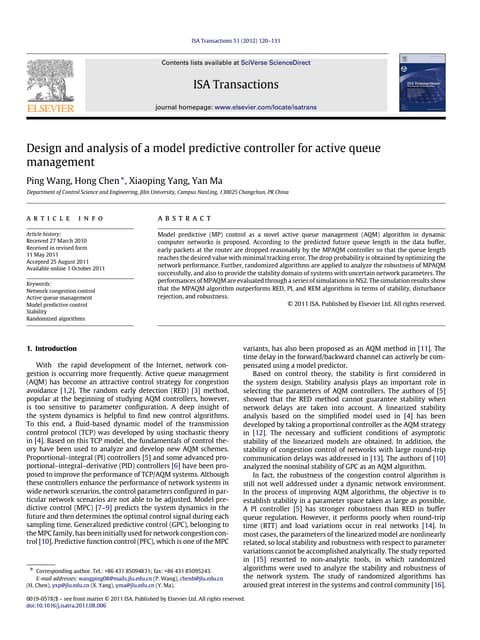
Consider the NCSs shown in Fig. 1. Suppose the physical plant
is given by the following system:
˙x(t) = (A + A(t)) x(t) + Bu(t)
x(t0) = x0
(1)
where x(t) ∈ Rn
and u(t) ∈ Rm
are state vector and control input
vector, respectively, A and B are two constant matrices, x0 ∈ Rn
is the initial condition, A(t) denotes the parameter uncertainty
satisfying the following condition
A(t) = DF(t)E (2)
where D and E are constant matrices of appropriate dimensions
and F(t) is an unknown time-varying matrix, which is Lebesque
measurable in t and satisfies FT
(t)F(t) ≤ I.
To facilitate theoretical development, the following assump-
tions, which are common in NCSs research in open literature, are
made in this paper:
Assumption 1. All state variables of the controlled plant are
measurable [20,27].
Assumption 2. The signal in a network is transmitted with a
single packet, and the computational delay of the controller is
negligible [12]. The data packet losses do not occur in transmission.
Assumption 3. The total network-induced delay τk
k ∈ Z+
is
bounded, i.e., 0 < τm ≤ τk ≤ τM , where τm and τM denote the
lower and upper delay bounds, respectively [28].
Fig. 1. The structure of event-triggered NCS with two quantizers.
As depicted in Fig. 1, considering the limited capacity of
the communication channels and also for reducing the data
transmission rate in the network, the state and control signals
are quantized before being transmitted into the network medium,
respectively, by two quantizers as one is on the Sampler side
denoted as f (·) and the other on the Controller side denoted
as g (·). At the same time, it is assumed that the Sensor and
Sampler are clock-driven, while the quantizers, Controller, ZOH
and Actuator are event-driven. The sampling period is assumed
to be h and the sampling instants are denoted as sk, k =
0, 1, 2, . . . . The sampled data x(sk) is directly transmitted to
the Event Generator, which is constructed between the Sensor
and the Quantizer f (·) as shown in Fig. 1. Here, suppose the
previous sampled data x(sk) is released or transmitted by the Event
Generator, then whether the current sampled data x(sk+j) needs to
be transmitted to the Controller through the quantizer are based
on the following quadratic condition:
x
sk+j
− x(sk)
T
V
x
sk+j
− x(sk)
≤ σxT
sk+j
Vx
sk+j
(3)
where V is a positive matrix, j ∈ {1, 2, . . .} , σ ∈ [0, 1). Given a set
of sampled times {s0, s1, s2, . . .}, for presentation simplicity, let
S = {x(s0), x(s1), x(s2), . . . , x(sk), . . .} (k = 0, 1, 2, . . .) denote
the state vector set that may be transmitted to the Controller
at time sk. Correspondingly, let T = {x(si0
), x(si1
), x(si2
), . . . ,
x(sik
), . . .} (k = 0, 1, 2, . . .) denote the state set that has been
transmitted to the Controller through the quantizer at time sik
, ik
is an integer, {i1, i2, . . .} is a subset of {0, 1, 2, . . .}, i.e., T ⊆ S.
There are two different types of assumptions imposed on the
sampling time sequences {sk} and the transmission (or release)
time sequences
sik
. Assume that the sampling time sequences
{sk} are strictly increasing and limk→∞ sk = ∞. In particular, we
assume sk = kh, where k = 0, 1, 2, . . . , h > 0 is the sampling
period. Note that for any k ∈ Z+
, x(sk) ̸= 0, since the closed-loop
system converges asymptotically to zero and thus never reaches
zero in finite time. Therefore, for convenience, define a function
χ (·, ·) : Rn
−→ R
χ
x
sk+j
, x(sk)
=
x
sk+j
− x(sk)
T
V
x
sk+j
− x(sk)
xT
sk+j
Vx
sk+j
. (4)
Remark 1. To reduce the burden of the network communication,
only parts of the sampled data will be sent to the remote controller
by the event-triggering scheme (3), from which it can be seen that
the release instants {i0, i1, i2, . . .} not only have a relation with
the parameter σ, but also the system sampled states. Particularly,
when σ = 0, the inequality (3) does not hold for almost all
the sampled state x
sk+j
, hence, ik = k, i.e., {i0, i1, i2, . . .} =
{0, 1, 2, . . .}, it shrinks to the periodic release case.](https://image.slidesharecdn.com/event-triggeredcontroldesignoflinearnetworkedsystemswithquantizations-160729200827/85/Event-triggered-control-design-of-linear-networked-systems-with-quantizations-2-320.jpg)
![S. Hu, D. Yue / ISA Transactions 51 (2012) 153–162 155
In Fig. 1, we denote the quantized measurement of x (ikh) as
¯x (ikh), and the control signal as ˜u(t) and the control input signal
as u(t). Then, at the release instant ikh, we have
¯x (ikh) = f (x (ikh))
˜u(ikh + τsc (ik)) = K ¯x (ikh)
u(ikh + τik
) = g(˜u(ikh + τsc (ik)))
(5)
where τik
= τec (ik) + τca(ik) is the network-induced delay calcu-
lated from the time instant ikh when the Event Generator releases
the sampled signal to the time instant when the Actuator trans-
mits data to the Plant including Event Generator-to-Controller
delay τec (ik) and Controller-to-Actuator delay τca(ik), K is the
state-feedback gain to be determined later.
On the Sampler side, the quantizer f (·) is defined as f (x) =
f1 (x1) f2 (x2) · · · fn (xn)
T
, where fs (xs) (s = 1, 2, . . . , n)are
chosen as logarithmic quantizers given by
fs (xs) =
u
(s)
l , if
1
1 + δfs
u
(s)
l < xs ≤
1
1 − δfs
u
(s)
l , xs > 0
0, if xs = 0
−fs (−xs) , if xs < 0
(6)
with δfs = (1 − ρfs )/(1 + ρfs )(0 < ρfs < 1). ρfs is a given constant
and is called the quantization density. Moreover, similar to [19,20],
the set of quantized levels is defined as Us = {±u
(s)
l , u
(s)
l =
ρl
fs
u
(s)
0 , l = ±1, ±2, . . . , } ∪ {±u
(s)
0 } ∪ {0} with u
(s)
0 > 0, and define
∆f = diag
∆f1
, ∆f2
, . . . , ∆fn
, where ∆fs ∈
−δfs , δfs
, s =
1, 2, . . . , n, then f (x) can be expressed by the sector bound method
as [18]
f (x) =
I + ∆f
x. (7)
For the quantizer on the Controller side, g (·) is defined as g(˜u) =
g1(˜u1) g2(˜u2) · · · gm(˜um)
T
, where gr (˜ur ) (r = 1, 2, . . . , m)
are also chosen as logarithmic quantizers similar to (6). Define
∆g = diag
∆g1
, ∆g2
, . . . , ∆gm
, g(˜u) can be expressed as
g(˜u) =
I + ∆g
˜u (8)
where ∆gr ∈ [−δgr , δgr ] (r = 1, 2, . . . , m), and δgr = (1 −
ρgr )/(1 + ρgr ) with ρgr being the quantization density of gr .
For simplicity, in this paper, it is assumed that δfs = δf and
δgr = δg , where δf and δg are two constants. Combining (5)–(8),
we have
u(ikh + τik
) =
I + ∆g
K
I + ∆f
x (ikh)
(K + ∆ (K)) x (ikh) (9)
where ∆ (K) = ∆g K + K∆f + ∆g K∆f . Considering the behavior
of the ZOH, the input signal is
u(t) = (K + ∆ (K)) x (ikh) , t ∈
ikh + τik
, ik+1h + τik+1
. (10)
Substituting (10) into (1) yields the following closed-loop system:
˙x(t) = (A + A) x(t) + B (K + ∆ (K)) x (ikh) ,
t ∈
ikh + τik
, ik+1h + τik+1
. (11)
For system (11), in this case, from (4), the event-triggered scheme
(3) can be expressed as
χ(x((k + j)h), x(kh)) ≤ σ, j = 1, 2, . . . . (12)
Under the event-triggered scheme (12), the transmission times are
assumed to be i0h, i1h, i2h, . . . , where i0 = 0 is the initial time.
rkh = ik+1h − ikh denotes the transmission period of the Event
Generator in (12). The output of the Event Generator is x(ikh) ∈
T, k = 0, 1, 2, . . . . Due to the existence of the network-induced
delays, these signals will arrive at the Controller side at the instants
i0h + τ0, i1h + τ1, i2h + τ2, . . . , respectively.
For technical convenience, consider the following intervals
ikh + τik
, ikh + h + τM
(13)
[ikh + h + τM , ikh + h + h + τM )
where ∆ is a positive integer satisfying ∆ ≥ 1. Notice that
ik+1 − ik ≥ 1. Next, we will discuss two cases for ik+1 − ik. One
is ik+1 − ik > 1, the other is ik+1 − ik = 1.
On the one hand, if ik+1 − ik > 1, it is assumed that ikh + h +
τM < ik+1h+τik+1
holds with ∆ = d, d−1, . . . , 1, where d is a finite
integer satisfying d ≥ 1, then the range
ikh + τik
, ik+1h + τik+1
can be divided into the following d + 1 sub-ranges
ikh + τik
, ik+1h + τik+1
=
ikh + τik
, ikh + h + τM
∪
d−1
∪
∆=1
[ikh + h
+ τM , ikh + h + h + τM )}
∪
ikh + dh + τM , ik+1h + τik+1
. (14)
As a special case, when d ≡ 1, {∪d−1
∆=1[ikh + h + τM , ikh + h +
h + τM )} is thought of as an empty set. Since τik
≤ τM , it is seen
that there does exist a finite integer d such that
ikh + dh + τM < ik+1h + τik+1
≤ ikh + dh + h + τM . (15)
For example, when ik = 1, ik+1 = 3, d = 1, the inequality (15)
holds. Moreover, x(ikh) and x(ikh + h) with ∆ = 1, 2, . . . , d
satisfy
[x (ikh + ∆h) − x(ikh)]T
V [x (ikh + h) − x(ikh)]
≤ σxT
(ikh + h) Vx (ikh + h) . (16)
Define a function τ(t) as
τ(t) =
t − ikh − τm, t ∈
ikh + τik
, ikh + h + τM
t − ikh − h − τm,
t ∈ [ikh + h + τM , ikh + h + h + τM )
∆ = 1, 2, . . . , d − 1
t − ikh − dh − τm,
t ∈
ikh + dh + τM , ik+1h + τik+1
.
(17)
It follows from (17) that
0 ≤ τik
− τm ≤ τ(t) ≤ h + τM − τm,
t ∈
ikh + τik
, ikh + h + τM
,
0 ≤ τik
− τm ≤ τM − τm ≤ τ(t) ≤ h + τM − τm,
t ∈ [ikh + h + τM , ikh + h + h + τM ) ,
∆ = 1, 2, . . . , d − 1
0 ≤ τik
− τm ≤ τM − τm ≤ τ(t) ≤ h + τM − τm,
t ∈
ikh + dh + τM , ik+1h + τik+1
,
(18)
where the third row in (18) can be obtained from the fact that
[ikh+dh+τM , ik+1h+τik+1
) ⊂ [ikh+dh+τM , ikh+(d+1)h+τM ).
Therefore, for t ∈ [ikh+τik
, ik+1h+τik+1
), τ(t) ∈ [0, h+τM −τm]. In
the following, we use ¯τ to denote h+τM −τm, that is τ(t) ∈ [0, ¯τ].
Furthermore, define an error vector as
ek(t) =
0, t ∈
ikh + τik
, ikh + h + τM
x(ikh) − x(ikh + ih),
t ∈ [ikh + h + τM , ikh + h + h + τM )
∆ = 1, 2, . . . , d − 1
x(ikh) − x(ikh + dh),
t ∈
ikh + dh + τM , ik+1h + τik+1
.
(19)
On the other hand, if ik+1 − ik = 1, ik+1h + τik+1
= ikh +
h + τik+1
≤ ikh + h + τM , in this case, there is no need to divide
the range
ikh + τik
, ik+1h + τik+1
into the sub-ranges liking (14).
Define τ(t) = t−ikh−τm, t ∈
ikh + τik
, ik+1h + τik+1
. Obviously,](https://image.slidesharecdn.com/event-triggeredcontroldesignoflinearnetworkedsystemswithquantizations-160729200827/85/Event-triggered-control-design-of-linear-networked-systems-with-quantizations-3-320.jpg)
![156 S. Hu, D. Yue / ISA Transactions 51 (2012) 153–162
0 ≤ τik
− τm ≤ τ(t) ≤ h + τM − τm. In this case, we can define
ek(t) ≡ 0.
Based on the above analysis, combining (16) and (19) results in
eT
k (t)Vek(t) ≤ σxT
(t − τ(t) − τm)Vx(t − τ(t) − τm),
t ∈
ikh + τik
, ik+1h + τik+1
. (20)
From (11) together with (19), we can obtain the following closed-
loop system
˙x(t) = (A + A) x(t) + B (K + ∆ (K)) x (t − τ(t) − τm)
+ B (K + ∆ (K)) ek(t), t ∈
ikh + τik
, ik+1h + τik+1
x(t) = φ(t), t ∈ [t0 − h − τM , t0] (21)
where φ(t) is initial function of x(t).
Remark 2. The problem of quantized feedback control for NCS
has been extensively studied such as [17,19–21,29,30]. However,
the problem formulated above is different from that in the above
mentioned references. In those literatures, only the effect of
quantization was considered. While in our problem, we not only
consider the effect of quantization but also consider how to
minimize the use of the communication resources by using the
event-triggering scheme. Recent works [23,31–33] have shown
that event-triggering can largely reduce the sampling rates in
the single processor systems, compared with the periodic task
models. It is worth noting that, the implementations of the event
conditions proposed in [23,31–33] require dedicated hardware to
continuously monitor the state of the plant, moreover, these event-
triggered control systems lack a systems theory that facilitates
the analysis and synthesis of such systems, however, the event
condition (12) only supervises the difference between the states
sampled in discrete instants regardless of what happens in
between updates, moreover, by a novel time interval analysis
technique (see, (14)), we model the event-triggered networked
control systems as a time-delay system, which can be analyzed
by the well-developed theory on time-delay systems. In addition,
to the best of the authors’ knowledge, this paper makes the first
attempt to introduce the event-triggering scheme to quantized
networked control systems (QNCSs) with two quantizers, which
will be shown advantageous over the traditional QNCSs with time-
triggering scheme (or period scheme) in the simulation example.
Remark 3. One thing worth mentioning is that in (21), ik (or sik
)
refers to the release instant of Event-Generator and it is a subset of
{0, 1, 2, . . .} (i.e., sampling instants). While in [19,34], ik refers to
the sampling instant. Due to the introduction of Event-Generator,
some of the sampler data may not necessarily be transmitted to the
controller through the quantizer, and thus the networked control
model formulated here is essentially different from that in [19,34].
At the end of this section, let us introduce some important
lemmas which will be used in the sequel.
Lemma 1 ([35]). Ξ1, Ξ2 and Ω are constant matrices of appropriate
dimensions and 0 ≤ τm ≤ τ(t) ≤ τM , then
(τ(t) − τm) Ξ1 + (τM − τ(t)) Ξ2 + Ω < 0
holds, if and only if the following inequalities hold
(τM − τm) Ξ1 + Ω < 0, (τM − τm) Ξ2 + Ω < 0.
Lemma 2 ([36]). For a given symmetric matrix Σ1 and any real
matrices Σ2, Σ3 with appropriate dimensions
Σ1 + sym {Σ2 Σ3} < 0
holds for all ∆ ∈ Ω, where
Ω
∆ = diag (∆1, . . . , ∆k, δ1I, . . . , δlI):‖∆‖ ≤ 1, ∆i ∈ Rni×ni
,
i = 1, . . . , k, δj ∈ R, j = 1, . . . , l, k, l ∈ Z+
if and only if there exists an L ∈ L such that
[
Σ1 + ΣT
3 LΣ3 ∗
Σ2 −L
]
< 0
holds, where L {diag(s1I, . . . , skI, s1, . . . , sl) : 0 < si ∈ R, 0 <
sj ∈ Rni×ni , k, l ∈ Z+
}. In particular, when k = 1, l = 0, that
Σ1 + sym {Σ2 Σ3} < 0 holds for all ‖∆1‖ ≤ 1 is equivalent to
the existence of s1 > 0 such that Σ1 + s1ΣT
3 Σ3 + s−1
1 Σ2ΣT
2 < 0.
Lemma 3 ([37]). For matrices R > 0, X and any scalar ρ, the
inequality −XR−1
X ≤ ρ2
R − 2ρX holds.
3. Main results
Here we consider the robust quantized control of uncertain
system (21) with event-triggering scheme (12). We first give
sufficient conditions for the closed-loop systems (21) to be
asymptotically stable. Then we propose a design method for a
robust quantized state feedback controller for an uncertain system
(1) with a novel event-triggering scheme (12).
Theorem 1. For given parameters τm, ¯τ, σ, matrix V > 0 and feed-
back gain K, system (21) with event-triggering scheme (12) is asymp-
totically stable, if there exist matrices P > 0, Qi > 0, Ri > 0 (i =
1, 2, 3), Z > 0, and matrices Zj (j = 1, 2, 3, 4), M, N of appropriate
dimensions satisfying the following LMIs
Π11 + Υ + Υ T
∗ ∗ ∗
Π21(l) −R2 ∗ ∗
Π31 0 Π33 ∗
Π41 0 0 Π44
< 0, l = 1, 2 (22)
where Π11 is given in Box I.
Proof. Construct a Lyapunov–Krasovskii functional candidate as
V(t) = xT
(t)Px(t) +
∫ t
t−τm
xT
(s)Q1x(s)ds
+
∫ t
t−¯τ
xT
(s)Q2x(s)ds
+
∫ t
t−δ
xT
(s)Q3x(s)ds +
∫ 0
−τm
∫ t
t+θ
˙xT
(s)R1 ˙x(s)ds
+
∫ 0
−¯τ
∫ t
t+θ
˙xT
(s)R2 ˙x(s)ds +
∫ 0
−δ
∫ t
t+θ
˙xT
(s)R3 ˙x(s)ds
+
∫ −τm
−δ
∫ t
t+θ
˙xT
(s)Z ˙x(s)ds (23)
where δ = τm + ¯τ with ¯τ = h + τM − τm, P > 0, Qi > 0, Ri >
0 (i = 1, 2, 3) and Z > 0 with appropriate dimensions. Taking the
derivation of V(t) for t ∈
ikh + τik
, ik+1h + τik+1
, and by adding
and subtracting the term eT
k (t)Vek(t), we have
˙V(t) = 2xT
(t)P [(A + A) x(t)
+ B (K + ∆ (K)) x (t − τ(t) − τm)
+ B (K + ∆ (K)) ek(t)] + xT
(t)(Q1 + Q2 + Q3)x(t)
− xT
(t − τm)Q1x(t − τm) − xT
(t − ¯τ)Q2x(t − ¯τ)
− xT
(t − δ)Q3x(t − δ)
+ ˙xT
(t) (τmR1 + ¯τR2 + δR3 + ¯τZ) ˙x(t)](https://image.slidesharecdn.com/event-triggeredcontroldesignoflinearnetworkedsystemswithquantizations-160729200827/85/Event-triggered-control-design-of-linear-networked-systems-with-quantizations-4-320.jpg)
![S. Hu, D. Yue / ISA Transactions 51 (2012) 153–162 157
Π11 =
P(A + A(t)) + (A + A(t))T
P + Q1 + Q2 + Q3 ∗ ∗ ∗ ∗ ∗ ∗
0 −Q1 ∗ ∗ ∗ ∗ ∗
0 0 0 ∗ ∗ ∗ ∗
0 0 0 −Q2 ∗ ∗ ∗
(K + ∆(K))T
BT
PT
0 0 0 σV ∗ ∗
0 0 0 0 0 −Q3 ∗
(K + ∆(K))T
BT
PT
0 0 0 0 0 −V
,
Υ =
Z1 + Z4 + M −Z1 + Z2 −M + N −N −Z2 + Z3 −Z3 − Z4 0
,
Π31 =
τmZ1 ¯τZ2 δZ3 δZ4
T
, Π33 = diag {−τmR1, −¯τZ, −δZ, −δR3} ,
Π41 =
τmR1 ¯τR2 δR3 ¯τZ
T
Π, Π =
A + A(t) 0 0 0 B(K + ∆(K)) 0 B(K + ∆(K))
Π44 = diag {−τmR1, −¯τR2, −δR3, −¯τZ} , Π21(1) =
√
¯τMT
, Π21(2) =
√
¯τNT
Box I.
−
∫ t
t−τm
˙xT
(s)R1 ˙x(s)ds −
∫ t
t−¯τ
˙xT
(s)R2 ˙x(s)ds
−
∫ t
t−δ
˙xT
(s)R3 ˙x(s)ds −
∫ t−τm
t−τm−τ(t)
˙xT
(s)Z ˙x(s)ds
−
∫ t−τm−τ(t)
t−δ
˙xT
(s)Z ˙x(s)ds +
6−
j=1
Γj + eT
k (t)Vek(t)
− eT
k (t)Vek(t) (24)
where Γj (j = 1, 2, . . . , 6) are introduced by using a free weighting
matrix method [38]
0 = Γ1 = 2ξT
(t)Z1
[
x(t) − x(t − τm) −
∫ t
t−τm
˙x(s)ds
]
(25)
0 = Γ2 = 2ξT
(t)Z2
x(t − τm) − x(t − τm − τ(t))
−
∫ t−τm
t−τm−τ(t)
˙x(s)ds
(26)
0 = Γ3 = 2ξT
(t)Z3
x(t − τm − τ(t)) − x(t − δ)
−
∫ t−τm−τ(t)
t−δ
˙x(s)ds
(27)
0 = Γ4 = 2ξT
(t)Z4
[
x(t) − x(t − δ) −
∫ t
t−δ
˙x(s)ds
]
(28)
0 = Γ5 = 2ξT
(t)M
[
x(t) − x(t − τ(t)) −
∫ t
t−τ(t)
˙x(s)ds
]
(29)
0 = Γ6 = 2ξT
(t)N
[
x(t − τ(t)) − x(t − ¯τ) −
∫ t−τ(t)
t−¯τ
˙x(s)ds
]
(30)
where Zj (j = 1, 2, 3, 4), M and N are matrices with appropriate
dimensions and ξT
(t) is given in Box II. Notice that
˙xT
(t) (τmR1 + ¯τR2 + δR3 + ¯τZ) ˙x(t)
= ξT
(t)ΠT
(τmR1 + ¯τR2 + δR3 + ¯τZ) Πξ(t) (31)
−
∫ t
t−¯τ
˙xT
(s)R2 ˙x(s)ds = −
∫ t
t−τ(t)
˙xT
(s)R2 ˙x(s)ds
−
∫ t−τ(t)
t−¯τ
˙xT
(s)R2 ˙x(s)ds (32)
−2ξT
(t)M
∫ t
t−τ(t)
˙x(s)ds ≤ τ(t)ξT
(t)MR−1
2 MT
ξ(t)
+
∫ t
t−τ(t)
˙xT
(s)R2 ˙x(s)ds (33)
and
− 2ξT
(t)N
∫ t−τ(t)
t−¯τ
˙x(s)ds ≤ (¯τ − τ(t)) ξT
(t)NR−1
2 NT
ξ(t)
+
∫ t−τ(t)
t−¯τ
˙xT
(s)R2 ˙x(s)ds. (34)
Combining (24)–(34) we obtain
˙V(t) ≤ ξT
(t)
Π11 + Υ + Υ T
+ + Ψ + τ(t)MR−1
2 MT
+ (¯τ − τ(t)) NR−1
2 NT
ξ(t)
−
∫ t
t−τm
ηT
(t, s) 2 η(t, s)ds
−
∫ t−τm
t−τm−τ(t)
ηT
(t, s) 3 η(t, s)ds
−
∫ t−τm−τ(t)
t−δ
ηT
(t, s) 4 η(t, s)ds
−
∫ t
t−δ
ηT
(t, s) 5 η(t, s)ds (35)
where ηT
(t, s) =
ξT
(t) ˙xT
(s)
and
= ΠT
(τmR1 + ¯τR2 + δR3 + ¯τZ) Π
Ψ = τmZ1R−1
1 ZT
1 + ¯τZ2Z−1
ZT
2 + δZ3Z−1
ZT
3 + δZ4R−1
3 ZT
4
2 =
[
Z1R−1
1 ZT
1 ∗
Z1 R1
]
, 3 =
[
Z2Z−1
ZT
2 ∗
Z2 Z
]
4 =
[
Z3Z−1
ZT
3 ∗
Z3 Z
]
, 5 =
[
Z4R−1
3 ZT
4 ∗
Z4 R3
]
.
On the one hand, since R1 > 0, Z > 0 and R3 > 0, l ≥
0 (l = 2, 3, 4, 5), then combined with (35), it can be seen that if
Π11 + Υ + Υ T
+ + Ψ + τ(t)MR−1
2 MT
+ (¯τ − τ(t)) NR−1
2 NT
< 0 (36)
holds for t ∈
ikh + τik
, ik+1h + τik+1
, then ˙V(t) < 0. On the other
hand, by Lemma 1, (36) is equivalent to
Π11 + Υ + Υ T
+ + Ψ + ¯τMR−1
2 MT
< 0 (37)
Π11 + Υ + Υ T
+ + Ψ + ¯τNR−1
2 NT
< 0. (38)](https://image.slidesharecdn.com/event-triggeredcontroldesignoflinearnetworkedsystemswithquantizations-160729200827/85/Event-triggered-control-design-of-linear-networked-systems-with-quantizations-5-320.jpg)
![158 S. Hu, D. Yue / ISA Transactions 51 (2012) 153–162
ξT
(t) =
xT
(t) xT
(t − τm) xT
(t − τ(t)) xT
(t − ¯τ) xT
(t − τm − τ(t)) xT
(t − δ) eT
k (t)
.
Box II.
By the Schur complement, (37) and (38) are equivalent to (22)
for l = 1, 2, respectively. Therefore, if (22) holds for l = 1, 2,
then ˙V(t) < 0, and the asymptotic stability of the system (21) is
guaranteed. This completes the proof.
Remark 4. In the process of calculating the derivative of V(t)
along the solutions of system (21), 6 different types of free weight-
ing matrices (or slack matrix variables) are introduced. The role of
free weighting matrices is to reduce the conservatism caused by
eliminating the integral terms such as −
t
t−¯τ
˙xT
(s)R2 ˙x(s)ds. More-
over, the introduction of free weighting matrices make it unneces-
sary to perform the model transformation on the original system,
while it is known that the model transformation usually leads to
some conservatism when bounding the cross terms.
Remark 5. Note that the term σV in the (5, 5) block of Π11
results from the term eT
k (t)Vek(t) in (24) by using the trigger
condition (20), which renders the effects of the trigger parameters
σ and V, and sampling period h involved in the proposed stability
conditions.
Based on Theorem 1, the following result can be concluded
for the quantized feedback control design of the closed-loop
system (21).
Theorem 2. For given parameters τm, ¯τ, σ, γ and ρl (l = 1, 2, 3,
4, 5), system (21) under event-triggering scheme (12) with V =
X−1 ¯VX−1
is asymptotically stable, if there exist matrices X > 0, ¯Qi >
0, ¯Ri > 0 (i = 1, 2, 3), ¯Z > 0, ¯V > 0, W > 0 and matrices
¯Zj (j = 1, 2, 3, 4), ¯M, ¯N, Y of appropriate dimensions and scalars
εj > 0 (j = 1, 2, 3, 4) satisfying the following LMIs
[
γ W ∗
Y In
]
≥ 0 (39)
2ρ5X − ρ2
5 In ≥ W (40)
¯Ξ(l) ∗ ∗ ∗
¯Ξ21
¯Ξ22 ∗ ∗
¯Ξ31 0 ¯Ξ33 ∗
¯Ξ41 0 0 ¯Ξ44
< 0, l = 1, 2 (41)
where equations are given in Box III. Moreover, if the above conditions
are feasible, a desired controller gain matrix in the form of (5) is given
by K = YX−1
.
Proof. Note that the inequalities (22) can be equivalently ex-
pressed as
Ξ + sym {HDF(t)GE } + sym
HT
B ∆g HK
+ sym
HT
B KHf
+sym
HT
B ∆g KHf
< 0 (42)
where
Ξ =
Σ11 + Υ + Υ T
∗ ∗ ∗
Π21(l) −R2 ∗ ∗
Π31 0 Π33 ∗
Σ41 0 0 Π44
with Π21(l), Π31, Π33, Π44 are defined in (22) and equations given
in Box IV. Using Lemma 2, it follows from (42) that there exist
scalars εj > 0 (j = 1, 2, 3, 4) such that
Ξ + ε1HDHT
D + ε−1
1 GT
E GE + ε2HT
B ∆2
g HB + ε−1
2 HT
k Hk
+ ε3HT
B HB + ε−1
3 HT
f KT
KHf + ε4HT
B ∆2
g HB
+ ε−1
4 HT
f KT
KHf < 0. (43)
On the other hand, from (39), we have
γ W − YT
Y ≥ 0. (44)
Note that XT
X ≥ 2ρ5X − ρ2
5 In by using Lemma 3. In addition, since
K = YX−1
, then combining (44) and (40), we obtain
KT
K ≤ γ In. (45)
From (43) and (45), we can conclude that if
Ξ + ε1HDHT
D + ε−1
1 GT
E GE + χg HT
B HB
+ ε−1
2 HT
k Hk + χf HT
I HI < 0 (46)
where
χg = ε2δ2
g + ε3 + ε2
4δ2
g , χf = ε−1
3 γ δ2
f + ε−1
4 γ δ2
f
HI =
0 0 0 0 In 0 In 0 · · · 0
16 blocks
then (43) holds. By the Schur complement, (46) is equivalent to
Ξ ∗ ∗ ∗ ∗ ∗ ∗
ε1HD −ε1In ∗ ∗ ∗ ∗ ∗
GE 0 −ε1In ∗ ∗ ∗ ∗
χg HB 0 0 −χg In ∗ ∗ ∗
HK 0 0 0 −ε2In ∗ ∗
γ δf HI 0 0 0 0 −ε3γ In ∗
γ δf HI 0 0 0 0 0 −ε4γ In
< 0. (47)
Define X = P−1
, J = diag{J1, J2, J3}, pre- and post-multiplying
(47) with J, where J1 = diag{X, . . . , X
7
}, J2 = {X, . . . , X
5
},
J3 = {R−1
1 , R−1
2 , R−1
3 , Z−1
, In, . . . , In
6
}. Define new matrix variables
¯V = XVX, ¯Qi = XQiX, ¯Z = XZX, Y = KX, ¯Zj = XZjX (j =
1, 2, 3, 4), ¯M = J1MX, ¯N = J1NX, and using Lemma 3 with the
inequalities
− X ¯R−1
i X ≤ ρ2
i
¯Ri − 2ρiX, i = 1, 2, 3,
−XZ−1
X ≤ ρ2
4 Z − 2ρ4X (48)
then by the Schur complement, (41) can be obtained easily. This
completes the proof.
Remark 6. By Theorem 2, the problem of quantized control design
for networked control system (21) can be solved by finding
a feasible solution to linear matrix inequalities (39)–(41) with
several tuning parameters. To reduce the conservatism that may
result from the deriving LMIs based on (39)–(41), one can apply
the idea of the cone complementarity algorithm (CCL) developed
in [39] to transform the original non-convex feasibility problem
to a nonlinear optimization problem which can be solved by
the iterative algorithm needed in the CCL Algorithm [39]. For
simplicity, in this paper, we only use a basic matrix inequality to
effectively solve the problem.
Remark 7. The optimal values of the tuning parameters ρl (l =
1, 2, 3, 4, 5) that were introduced in Theorem 2 can be found as
follows. First choose the index function topt, which can be obtained
by solving the feasibility problem using LMI TOOLBOX. If the index](https://image.slidesharecdn.com/event-triggeredcontroldesignoflinearnetworkedsystemswithquantizations-160729200827/85/Event-triggered-control-design-of-linear-networked-systems-with-quantizations-6-320.jpg)
![S. Hu, D. Yue / ISA Transactions 51 (2012) 153–162 159
¯Ξ(l) =
¯Π11 + ¯Υ + ¯Υ T
∗ ∗ ∗
¯Π21(l) −¯R2 ∗ ∗
¯Π31 0 ¯Π33 ∗
¯Π41 0 0 ¯Π44
¯Π11 =
AX + XAT
+ ¯Q1 + ¯Q2 + ¯Q3 ∗ ∗ ∗ ∗ ∗ ∗
0 − ¯Q1 ∗ ∗ ∗ ∗ ∗
0 0 0 ∗ ∗ ∗ ∗
0 0 0 − ¯Q2 ∗ ∗ ∗
YT
BT
0 0 0 σ ¯V ∗ ∗
0 0 0 0 0 − ¯Q3 ∗
YT
BT
0 0 0 0 0 − ¯V
¯Υ =
¯Z1 + ¯Z4 + ¯M −¯Z1 + ¯Z2 − ¯M + ¯N − ¯N −¯Z2 + ¯Z3 −¯Z3 − ¯Z4 0
¯Π21(1) =
√
¯τ ¯MT
, Π21(2) =
√
¯τ ¯NT
,
¯Π31 =
τm
¯Z1 ¯τ ¯Z2 δ¯Z3 δ¯Z4
T
, Π33 = diag
−τm
¯R1, −¯τ ¯Z, −δ¯Z, −δ¯R3
¯Π41 =
τmIn ¯τIn δIn ¯τIn
T
AX 0 0 0 BY 0 BY
¯Π44 = diag
τm
ρ2
1
¯R1 − 2ρ1X
, ¯τ
ρ2
2
¯R2 − 2ρ2X
, δ
ρ2
3
¯R3 − 2ρ3X
, ¯τ
ρ2
4
¯Z − 2ρ4X
¯Ξ21 =
[
ε1
¯HD
¯GE
]
, ¯Ξ22 =
[
−ε1In ∗
0 −ε1In
]
, ¯Ξ31 =
[
χg
¯HB
¯Hk
]
¯Ξ33 =
[
−χg In ∗
0 −ε2In
]
, ¯Ξ41 =
[
γ δf
¯HI
γ δf
¯HI
]
, ¯Ξ44 =
[
−ε3γ In ∗
0 −ε4γ In
]
¯HD =
DT
0 · · · 0 τmDT
¯τDT
δDT
¯τDT
16 blocks
¯GE =
EX 0 · · · 0 0 0 0 0
16 blocks
¯HB =
BT
0 · · · 0 τmBT
¯τBT
δBT
¯τBT
16 blocks
¯Hk =
0 0 0 0 Y 0 Y 0 · · · 0
16 blocks
¯HI =
0 0 0 0 X 0 X 0 · · · 0
16 blocks
.
Box III.
function topt is negative, there exists a feasible solution to the set
of LMIs under consideration. Then, a genetic algorithm (GA) can be
employed to search the combinations of ρl (l = 1, 2, 3, 4, 5) with
the index function topt for the given positive scalars τm, ¯τ, σ, γ .
We can use the algorithm (Algorithms 2 and 3) proposed
in [40] to search the optimal combination of ρl (l = 1, 2, 3, 4, 5).
If all the resulting minimum values of the index function
topt are negative, than the tuning parameters can be obtained
correspondingly.
4. Numerical examples
In this section, we give two examples to illustrate the efficiency
and advantage of the obtained results in this paper.
Example 1. The inverted pendulum introduced by Wang in [25]
is considered. The plant’s state-space representation is given
by
˙x(t) =
0 1 0 0
0 0
−mg
M
0
0 0 0 1
0 0 g/l 0
x(t) +
0
1/M
0
−1/Ml
u(t) (49)
where M = 10 is the cart mass and m = 1 is the mass of the
pendulum bob, l = 3 is the length of the pendulum arm and
g = 10 is gravitational acceleration. The initial state is chosen as
the same in [25], that is, x0 =
0.98 0 0.2 0
T
. By simple
calculation, the eigenvalues of system matrix are 0, 0, 1.8257,
−1.8257, thus, the system is unstable without a controller. The
state x(t) =
xT
1 (t) xT
2 (t) xT
3 (t) xT
4 (t)
T
=
y ˙y θ ˙θ
T
,
where xi (i = 1, 2, 3, 4) are the cart’s position, the cart’s velocity,
the pendulum bob’s angle and the pendulum bob’s angular velocity
respectively.
For this example, we first compare our event-triggered scheme
with the event-triggered scheme in [41,25], the self-triggered
scheme in [31], and MATI in [42] when the effects of network-
induced delay and quantization are not considered, that is, τik
= 0
and ∆ (K) = 0 (see (9)). In this case, in order to apply Theorem 1 to
calculate the theoretical upper bound ¯τmax on ¯τ, one has to choose
the sufficiently small value of τm(=τM ). Since ¯τ = h + τM − τm,
the maximum allowed sampling period hmax = ¯τmax. Set τm =
τM = 0.000001, σ = 0.1 and the feedback gain of the controller is
chosen as the same as in [25]
K =
2 12 378 210
. (50)](https://image.slidesharecdn.com/event-triggeredcontroldesignoflinearnetworkedsystemswithquantizations-160729200827/85/Event-triggered-control-design-of-linear-networked-systems-with-quantizations-7-320.jpg)
![160 S. Hu, D. Yue / ISA Transactions 51 (2012) 153–162
Σ11 =
PA + AT
P + Q1 + Q2 + Q3 ∗ ∗ ∗ ∗ ∗ ∗
0 −Q1 ∗ ∗ ∗ ∗ ∗
0 0 0 ∗ ∗ ∗ ∗
0 0 0 −Q2 ∗ ∗ ∗
KT
BT
PT
0 0 0 σV ∗ ∗
0 0 0 0 0 −Q3 ∗
KT
BT
PT
0 0 0 0 0 −V
Σ41 =
τmR1 ¯τR2 δR3 ¯τZ
T
A 0 0 0 BK 0 BK
HD =
DT
P 0 · · · 0 τmDT
P ¯τDT
P δDT
P ¯τDT
P
16 blocks
GE =
E 0 · · · 0 0 0 0 0
16 blocks
HB =
BT
P 0 · · · 0 τmBT
P ¯τBT
P δBT
P ¯τBT
P
16 blocks
Hk =
0 0 0 0 K 0 K 0 · · · 0
16 blocks
Hf =
0 0 0 0 ∆f 0 ∆f 0 · · · 0
16 blocks
.
Box IV.
Table 1
Comparison results for average period with different triggering schemes.
Schemes Average periods
Event triggered scheme in [41] <10−5
MATI in [42] 0.0169
Self triggered scheme in [31] 0.1782
Event triggered scheme in [25] 0.4816
Our event triggered scheme for h = 0.1 0.6567
Applying Theorem 1, we can obtain ¯τmax (hmax) as 0.25, and the
corresponding trigger parameter V is given by
V =
0.0310 0.1362 4.4682 2.3880
0.1362 0.8385 26.127582 14.6323
4.4682 26.127582 824.4010 457.1915
2.3880 14.6323 457.1915 255.8426
.
Additionally, under the above conditions, the corresponding aver-
age periods ¯h by methods of [41,25,31,42] and our event-triggered
scheme are summarized in Table 1. It can be seen from Table 1 that
our event-triggered scheme results in a much larger average period
that the previous event-/self-triggered schemes.
On the other hand, the effect of quantization is still not consid-
ered, but we take a look at non-zero delay cases. Setting τm = 0.01
and σ = 0.1, applying Theorem 1 with the feedback gain (50), the
maximum allowable value of ¯τ is 0.24, and the corresponding V is
given by
V =
0.0305 0.1352 4.4379 2.3712
0.1352 0.8367 25.9675 14.5844
4.4379 25.9675 819.0712 454.3777
2.3712 14.5844 454.3777 254.9245
. (51)
Since ¯τ = h + τM − τm, h is a fixed sampling period, letting
h = 0.01, the upper bound of the network-induced delays τM is
obtained as 0.24, which is much larger than the result (the up-
per bound of delays is 0.1) obtained in [25] under the same con-
ditions. Taking h = 0.01 and using the trigger condition (3) with
σ = 0.1 and the obtained V, the simulation results for t ∈ [0, 40]
show that, only 143 sampled signals need to be transmitted to the
controller through the quantizer, which takes 3.57% of the num-
ber of the whole sample signals. The release instants and release
intervals are depicted in Fig. 3. The state responses of system (49)
with the feedback gain (50) and trigger matrix (51) are shown in
Fig. 4, from which it can be seen that the event-triggered feedback
system still converges to the equilibrium even when the delay τik
satisfies 0.01 = τm ≤ τik
≤ τM = 0.24, and thus, our event
triggered scheme also appears to be robust to network-induced
delay. Furthermore, by simple calculation, the average period is
0.2788, which is also larger than the period (0.1882) obtained by
the work [25].
Example 2. Consider the system (1) with
A =
[
−2 0
1 1
]
, B =
[
0
0.5
]
, D = I2, E = 0.1I2. (52)
For this example, it is easy to check that the eigenvalues of A are
−2 and 1, hence the open-loop system (1) is not stable. Similar
to [19], the quantization densities in (6) and (8) are chosen as ρf =
ρg = 0.818, for comparison with [19], our analysis was carried
out under the assumption that there are no packet dropouts in the
NCS. In this case, the network condition proposed in [19] reduced
to h +τik+1
≤ η (since ik+1 −ik = 1), of which the maximum value
of the parameter η can be obtained by using the method proposed
in [19] with γ = 20, i.e., ηmax = 0.2. Therefore, for a fixed sampling
period h = 0.01, τik+1
≤ 0.19. While by using the Theorem 2
developed in this paper with τm = 0.01, h = 0.01, γ = 20
and σ = 0, for convenience, setting ρl = 1 (l = 1, 2, 3, 4, 5),
we can get the maximum value of ¯τ, i.e., ¯τmax = 0.22. Notice
that ¯τ = h + τM − τm, hence we can obtain the upper bound of
the network-induced delay τM = 0.22, i.e., τik
≤ 0.22. Thus our
result is better than that in [19] under the same conditions. Setting
τm = 0.01, h = 0.01, γ = 20, ρl = 1, σ = 0, and ¯τ = 0.22,
applying Theorem 2 again, we can obtain the feedback gain
K =
−1.0961 −3.6953
(53)
and the corresponding trigger matrix V is
V = 105
×
[
1.3489 0.0113
0.0113 1.4416
]
(54)](https://image.slidesharecdn.com/event-triggeredcontroldesignoflinearnetworkedsystemswithquantizations-160729200827/85/Event-triggered-control-design-of-linear-networked-systems-with-quantizations-8-320.jpg)
![S. Hu, D. Yue / ISA Transactions 51 (2012) 153–162 161
Table 2
The computation results for given τm = 0.01, h = 0.01, γ = 50, ρl = 1, ρf = ρg = 0.818.
σ 0 0.01 0.02 0.03
¯τ 0.29 0.24 0.22 0.21
K
−1.2373 −3.7808
−1.3459 −4.0821
−1.3906 −4.2231
−1.4388 −4.3494
V 104
×
[
1.1175 0.0628
0.0628 1.5647
] [
168.5775 −6.2094
−6.2094 156.7343
] [
110.2946 −5.1827
−5.1827 103.3038
] [
84.7675 −5.3660
−5.3660 78.7934
]
¯h 0.01 0.0472 0.0621 0.0738
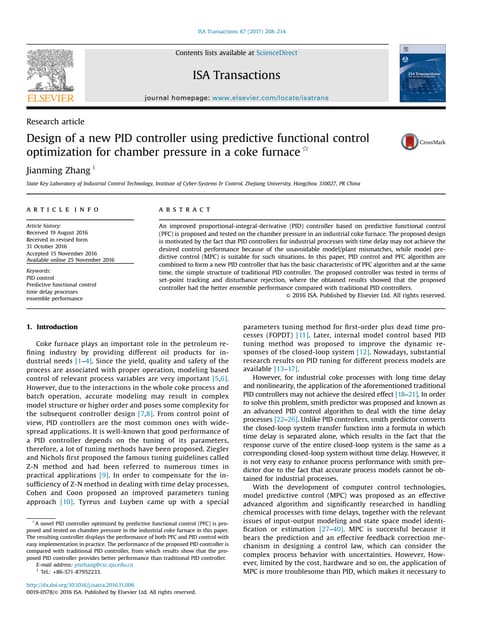
Fig. 2. The release instants and release interval with feedback gain (50) and
matrix (51).
then choose the initial condition φ(t) =
1 −2
T
, the state re-
sponses of system (1) with (52)–(54) are depicted in Fig. 2. In addi-
tion, a more detailed comparison for different cases are shown in
Table 1 (¯h denotes the average period). From Table 1, it can be seen
that the larger the σ, the larger the average period ¯h and the smaller
the ¯τ. That is to say, as we tolerate a larger amount of error (the
corresponding value of σ is larger), the average period increases,
and the allowable maximum delay decreases, as one would ex-
pect. In addition, by comparison, the sampler with event-triggering
scheme transmits only 21.18% (σ = 0.01) , 16.08% (σ = 0.02),
and 13.49% (σ = 0.03) of samples produced by time-triggering
scheme (σ = 0), respectively. In other words, the resource uti-
lization by the event-triggering scheme can obtain 78.82%, 83.92%,
and 86.51% improvement, respectively. For a fixed σ = 0.001,
Fig. 4. Trajectories of the states of system (1) with the feedback gain (53) and
matrix (54).
Table 3
The computation results for given τm = 0.01, ρl = 1, ρf = ρg = 0.818, σ =
0.001.
γ ¯τ K V
20 0.2
−1.1140 −3.7338
[
461.8130 −117.5741
−117.5741 239.4689
]
35 0.27
−1.2366 −3.8139
[
572.6875 −24.8843
−24.8843 427.5793
]
50 0.28
−1.2710 −3.8586
[
795.7616 −93.6071
−93.6071 598.4326
]
ρl = 1, ρf = ρg = 0.818, τm = 0.01, some computation results
are shown in Table 2, from which it can be found that the larger the
parameter γ , the larger the maximum value ¯τ (See Table 3).
Fig. 3. Trajectories of the states of system (49) with the feedback gain (50) and matrix (51).](https://image.slidesharecdn.com/event-triggeredcontroldesignoflinearnetworkedsystemswithquantizations-160729200827/85/Event-triggered-control-design-of-linear-networked-systems-with-quantizations-9-320.jpg)
![162 S. Hu, D. Yue / ISA Transactions 51 (2012) 153–162
5. Conclusion
To minimize the use of the communication resources, in this
paper, the problem of event-triggered control design of continuous-
time linear networked systems with quantizations has been stud-
ied. By taking the characteristics of event-triggering mechanism
into account, a novel interval delay analysis technique is devel-
oped. At the same time, considering the effect of quantization in
two directions, a new NCS model has been developed. Based on
this model, a new stability criterion has been derived, which is de-
pendent on the lower and upper bound of the network-induced
delay, quantization levels and trigger parameters to guarantee the
asymptotic stability of the closed-loop networked system with
norm bounded uncertainty. Since the relationship between the
network-induced delay, the feedback gain, the quantization lev-
els and trigger parameters is established, it can be used to sched-
ule NCS resources through adjusting one or more parameters for a
better tradeoff between the control performance and the network
conditions. The control design has also been developed on the basis
of quantizers with an infinite number of quantization levels and an
event-triggering scheme. How to merge quantizations with a finite
number of quantization levels and our event-triggering scheme in
a unified framework is our future work. Two numerical examples
are given to demonstrate the advantages of the obtained results.
Acknowledgments
The authors thank the Associate Editor and anonymous
reviewers for their valuable comments and suggestions that have
helped them in improving the paper. This work is supported by
the National Natural Science Foundation of China under Grant
60834002 and 61074025.
References
[1] Tian Y, Levy D. Compensation for control packet dropout in networked control
systems. Information Sciences 2008;178(5):1263–78.
[2] Zhang W, Branicky M, Phillips S. Stability of networked control systems. IEEE
Control Systems Magazine 2001;21(1):84–99.
[3] Walsh G, Ye H, Bushnell L. Stability analysis of networked control systems. IEEE
Transactions on Control Systems Technology 2002;10(3):438–46.
[4] Tipsuwan Y, Chow M. Control methodologies in networked control systems.
Control Engineering Practice 2003;11(10):1099–111.
[5] Hu S, Zhu Q. Stochastic optimal control and analysis of stability of networked
control systems with long delay. Automatica 2003;39(11):1877–84.
[6] Yue D, Han Q, Peng C. State feedback controller design of networked control
systems. IEEE Transactions on Circuits and Systems Part II: Express Briefs
2004;51(11):640–4.
[7] Zhang L, Shi Y, Chen T, Huang B. A new method for stabilization of networked
control systems with random delays. IEEE Transactions on Automatic Control
2005;50(8):1177–81.
[8] Yang T. Networked control system: a brief survey. IEE proceedings—-control
theory and applications, vol. 153. IET; 2006. p. 403–12.
[9] Yang F, Wang Z, Hung Y, Gani M. H∞ control for networked systems with
random communication delays. IEEE Transactions on Automatic Control 2006;
51(3):511–8.
[10] Wang Z, Yang F, Ho D, Liu X. Robust H∞ control for networked systems with
random packet losses. IEEE Transactions on Systems, Man, and Cybernetics,
Part B: Cybernetics 2007;37(4):916–24.
[11] Zhang H, Yang J, Su C. TS fuzzy-model-based robust H∞ design for
networked control systems with uncertainties. IEEE Transactions on Industrial
Informatics 2007;3(4):289–301.
[12] Jia X, Zhang D, Hao X, Zheng N. Fuzzy H∞ tracking control for nonlinear
networked control systems in TS fuzzy model. IEEE Transactions on Systems,
Man, and Cybernetics, Part B: Cybernetics 2009;39(4):1073–9.
[13] Heemels W, Teel A, Wouw N, Nesic D. Networked control systems with
communication constraints: tradeoffs between sampling intervals, delays
and performance. IEEE Transactions on Automatic Control 2010;55(8):
1781–96.
[14] Shi Y, Yu B. Robust mixed H2/H∞ control of networked control systems with
random time delays in both forward and backward communication links.
Automatica 2011;47(4):754–60.
[15] Elia N, Mitter S. Stabilization of linear systems with limited information. IEEE
Transactions on Automatic Control 2002;46(9):1384–400.
[16] Brockett R, Liberzon D. Quantized feedback stabilization of linear systems. IEEE
Transactions on Automatic Control 2002;45(7):1279–89.
[17] Liberzon D. Hybrid feedback stabilization of systems with quantized signals.
Automatica 2003;39(9):1543–54.
[18] Fu M, Xie L. The sector bound approach to quantized feedback control. IEEE
Transactions on Automatic Control 2005;50(11):1698–711.
[19] Yue D, Peng C, Tang G. Guaranteed cost control of linear systems over
networks with state and input quantisations. IEE Proceedings-control theory
and applications, vol. 153. IET; 2006. p. 658–64.
[20] Peng C, Tian Y. Networked H∞ control of linear systems with state
quantization. Information Sciences 2007;177(24):5763–74.
[21] Tian E, Yue D, Zhao X. Quantised control design for networked control systems.
IET Control Theory & Applications 2007;1(6):1693–9.
[22] Miskowicz M. Send-on-delta concept: an event-based data reporting strategy.
Sensors 2006;6(1):49–63.
[23] Tabuada P. Event-triggered real-time scheduling of stabilizing control tasks.
IEEE Transactions on Automatic Control 2007;52(9):1680–5.
[24] Heemels W, Sandee J, Bosch P. Analysis of event-driven controllers for linear
systems. International Journal of Control 2008;81(4):571–90.
[25] Wang X, Lemmon M. Event design in event-triggered feedback control
systems. In: Decision and control. 2008. 47th IEEE conference on. IEEE; 2009.
p. 2105–10.
[26] Li S, Sauter D, Xu B. Fault isolation filter for networked control system with
event-triggered sampling scheme. Sensors 2011;11(1):557–72.
[27] Lam H, Seneviratne L. LMI-based stability design of fuzzy controller for
nonlinear systems. IET Control Theory & Applications 2007;1(1):393–401.
[28] Yue D, Han Q, Lam J. Network-based robust H∞ control of systems with
uncertainty. Automatica 2005;41(6):999–1007.
[29] Zhai G, Mi Y, Imae J, Kobayashi T. Design of H. INF. Feedback control systems
with quantized signals. Journal of the Japan Society for Simulation Technology
2005;24(2):122–7.
[30] Gao H, Chen T. A new approach to quantized feedback control systems.
Automatica 2008;44(2):534–42.
[31] Wang X, Lemmon M. Self-triggered feedback control systems with finite-gain
L2 stability. IEEE Transactions on Automatic Control 2009;45(3):452–67.
[32] Wang X, Lemmon M. Self-triggering under state-independent disturbances.
IEEE Transactions on Automatic Control 2010;55(6):1494–500.
[33] Wang X, Lemmon M. Event-triggering in distributed networked control
systems. IEEE Transactions on Automatic Control 2011;56(3):586–601.
[34] Gao H, Chen T, Lam J. A new delay system approach to network-based control.
Automatica 2008;44(1):39–52.
[35] Yue D, Tian E, Zhang Y, Peng C. Delay-distribution-dependent stability and
stabilization of T–S fuzzy systems with probabilistic interval delay. IEEE
Transactions on Systems, Man, and Cybernetics, Part B: Cybernetics 2009;
39(2):503–16.
[36] El Ghaoui L, Lebret H. Robust solutions to least-squares problems with
uncertain data. SIAM Journal on Matrix Analysis and Applications 1997;18:
1035–64.
[37] Xiong J, Lam J. Stabilization of networked control systems with a logic ZOH.
IEEE Transactions on Automatic Control 2009;54(2):358–63.
[38] He Y, Wu M, She J, Liu G. Parameter-dependent Lyapunov functional
for stability of time-delay systems with polytopic-type uncertainties. IEEE
Transactions on Automatic Control 2004;49(5):828–32.
[39] El Ghaoui L, Oustry F, AitRami M. A cone complementarity linearization
algorithm for static output-feedback and related problems. IEEE Transactions
on Automatic Control 2002;42(8):1171–6.
[40] Zhang Y, Tian E. Networked control system design over wireless sensor
networks. In: Proceedings of the 3rd international conference on impulsive
dynamic systems and applications. 2006. p. 1519–24.
[41] Tabuada P, Wang X. Preliminary results on state-triggered scheduling of
stabilizing control tasks. In: 2006 45th IEEE conference on decision and
control. IEEE; 2006. p. 282–7.
[42] Carnevale D, Teel A, Nesic D. A Lyapunov proof of an improved maximum
allowable transfer interval for networked control systems. IEEE Transactions
on Automatic Control 2007;52(5):892–7.](https://image.slidesharecdn.com/event-triggeredcontroldesignoflinearnetworkedsystemswithquantizations-160729200827/85/Event-triggered-control-design-of-linear-networked-systems-with-quantizations-10-320.jpg)

This paper addresses the control design problem for event-triggered networked control systems (NCS) with both state and control input quantizations. An innovative delay system model is proposed to analyze the effects of network-induced delays and quantization within a unified framework, establishing asymptotical stability criteria using linear matrix inequalities. Simulation results demonstrate the effectiveness of the proposed method in stabilizing uncertain event-triggered NCS under quantization constraints.