![Research Article
Load estimator-based hybrid controller design for two-interleaved
boost converter dedicated to renewable energy and
automotive applications
Mohamed Bougrine a,b
, Mohammed Benmiloud a
, Atallah Benalia a
, Emmanuel Delaleau c
,
Mohamed Benbouzid b,d,n
a
University of Laghouat, LACoSERE Lab, Laghouat, Algeria
b
University of Brest, FRE CNRS 3744 IRDL, Brest, France
c
Ecole Nationale d'Ingénieurs de Brest, Mechatronics Department, Plouzané, France
d
Shanghai Maritime University, Shanghai, China
a r t i c l e i n f o
Article history:
Received 8 June 2016
Received in revised form
14 August 2016
Accepted 6 September 2016
Available online 16 September 2016
This paper was recommended for publica-
tion by Dr. Jeff Pieper
Keywords:
Interleaved boost converter
Hybrid dynamical system
Optimal limit cycle
Stabilization
Adaptive control
Fuel cell source
a b s t r a c t
This paper is devoted to the development of a hybrid controller for a two-interleaved boost converter
dedicated to renewable energy and automotive applications. The control requirements, resumed in fast
transient and low input current ripple, are formulated as a problem of fast stabilization of a predefined
optimal limit cycle, and solved using hybrid automaton formalism. In addition, a real time estimation of
the load is developed using an algebraic approach for online adjustment of the hybrid controller.
Mathematical proofs are provided with simulations to illustrate the effectiveness and the robustness of
the proposed controller despite different disturbances. Furthermore, a fuel cell system supplying a
resistive load through a two-interleaved boost converter is also highlighted.
& 2016 ISA. Published by Elsevier Ltd. All rights reserved.
1. Introduction
Climate change in the last century, mainly due to the increasing
carbon dioxide (CO2) released through human activities as shown
in Fig. 1, brings to light serious issues like global temperature and
sea level augmentation, ocean warming and acidification, shrink-
ing ice sheets, etc. These facts have pushed the scientific com-
munity for renewable and clean energy solutions to supply various
technological applications via switched converters.
Due to the power source and load constraints, the converter
structures have to meet some practical challenges such as relia-
bility, high power density, high efficiency, and low current/voltage
ripples. Parallel connection of switched converters or specifically
the interleaving approach meets the above requirements with
better power scalability characteristics compared to the classical
ones [2,3]. Fig. 2a depicts the topology of a DC–DC two-interleaved
boost converter, the two-phase boost topology was proposed as an
alternative to the classical single phase boost converter [4], and
the two-phase buck topology as an alternative to the classical buck
converter [5]. These interleaved topologies are widely used in
varieties of applications and systems that incorporate solar panels
or fuel cell sources, as reflected in the literature [6–11]. The
interleaving technique is also investigated for the microprocessors
power supply to achieve better computing performance using the
topology in Fig. 2b, which is known as multiphase/multi-channel
synchronous/interleaved buck converter [12–15]. The interleaved
bidirectional topology, obtained by changing each diode with a
controlled switching device in the interleaved boost converter, is
also explored in systems with rechargeable energy storage ele-
ments like batteries or supercapacitors [16–20].
Research studies have discussed these topologies from different
practical and fundamental points of view. The authors in [21] have
discussed the number of phases that can be used to obtain a tra-
deoff among some indexes such as: the switching losses, the
inductor volume, the input current ripples and the switches cost.
Power management in fuel cell hybrid vehicles involving battery/
Contents lists available at ScienceDirect
journal homepage: www.elsevier.com/locate/isatrans
ISA Transactions
http://dx.doi.org/10.1016/j.isatra.2016.09.001
0019-0578/& 2016 ISA. Published by Elsevier Ltd. All rights reserved.
n
Corresponding author at: University of Brest, FRE CNRS 3744 IRDL, Brest, France.
E-mail addresses: m.bougrine@lagh-univ.dz (M. Bougrine),
med.benmiloud@lagh-univ.dz (M. Benmiloud), a.benalia@lagh-univ.dz (A. Benalia),
delaleau@enib.fr (E. Delaleau), mohamed.benbouzid@univ-brest.fr (M. Benbouzid).
ISA Transactions 66 (2017) 425–436](https://image.slidesharecdn.com/load-estimator-based-hybrid-controller-design-for-two-interleav2017isa-tra-190321204112/75/Load-estimator-based-hybrid-controller-design-for-two-interleaved-boost-converter-dedicated-to-renewable-energy-and-automotive-applications-1-2048.jpg)
![supercapacitor as an auxiliary regenerative source is thoroughly
explored in [16,22]. A maximum power point tracking (MPPT)
approach in systems with solar module or a fuel cell source
associated to interleaved boost converter is performed in [23,24].
Other works deal with the energetic efficiency improvement by
considering variants of the interleaved topology such as soft
switching and resonant techniques, or coupled inductors [25,26].
Furthermore, the control of interleaved converters has been
dealt using several control strategies. Linear control techniques
based on the average model are effective only around a specific
operation points due to the neglected nonlinearities of the con-
verter model and the power source [27]. In [14,27], a sliding mode
and adaptive sliding mode controllers are designed and defended
to be robust ones. Model predictive control is developed for the
interleaved boost topology in [28]. Regardless of the fact that
several control techniques have been proposed, the transient and
steady-state control problem of the interleaved converter still pose
challenging issues. More precisely, the transient control deals with
a minimal response time and number of commutations require-
ments, which is beneficial for a fast MPPT achievement in a solar
panel based system for example. In addition, in electric vehicles, a
fast tracking of the supercapacitor reference current, may also
require an interleaved bidirectional converter to guarantee the
instantaneous peak power demands or to recover a maximum
energy through regenerative braking [29]. Moreover, information
processing in computers is directly related to the response time of
the microprocessors power supply in fast current variations
tracking [12]. The existing controllers may tackle the problem of a
fast transient with different approaches. Nevertheless, the steady-
state behavior, represented by states ripples, is not directly con-
trolled. Indeed, ripples amplitude and harmonic content of the
current is one of the various phenomena influencing fuel cell
lifespan as well as battery lifetime [11,22]. Besides, a small input
current ripple is advantageous for MPPT to operate around a
maximum power point without too much fluctuation [30].
Motivated by the above facts, we aim to address the control
problem of the transient and steady-state of the two-interleaved
boost converter. For this purpose, an exact instantaneous model of
the converter will be investigated in the next section using the
theory of hybrid dynamical systems. An adaptive transient and
steady-state controllers will be developed in Section 3 to solve the
problem of fast stabilization of a predefined optimal limit cycle.
Simulation results will be discussed in Section 4 and followed by
conclusions and future works that outline the main contributions
of the present paper.
2. Hybrid model of 2IBC and control formulation
We consider the 2IBC presented in Fig. 2a, supplying a resistive
load (R) and operating in continuous conduction mode (CCM).
Phase k consists of a non-ideal inductor ðLk; rkÞ, a diode ðDkÞ, and a
controlled semiconductor device ðswkÞ by a binary input signal
uk Af0; 1g. The instantaneous model of the 2IBC is given by:
diLk
dt
¼
1
Lk
ðvi ÀrkiLk
ÀukvoÞ; k ¼ 1; 2
dvo
dt
¼
1
Co
X2
k ¼ 1
ukiLk
À
vo
R
!
;
8
>>>><
>>>>:
ð1Þ
where iLk
is the inductor current of phase k. The voltages vi and vo
are the input and output voltages respectively. Á : f0; 1g↦f0; 1g is
the Not function.
The input signal ðu1; u2Þ combinations offer four different con-
verter operations without redundancy, known as discrete modes
in hybrid systems vocabulary. From (1), each discrete mode can be
represented by the following affine differential equation:
_x ¼ AqðtÞxþBqðtÞ ¼ f qðtÞðxÞ ð2Þ
with x ¼ ½iL1
iL2
voŠT
AX is the continuous state vector defined in a
physical operating region X DR3
. qðtÞ : Rþ ↦Q is the switching
signal, with Q ¼ fq1; q2; q3; q4g is the set of discrete modes. The
state matrices Aqi
AR3Â3
and Bqi
AR3Â1
are given by:
Aqi
¼
À r1
L1
0 Àu1
L1
0 Àr2
L2
Àu2
L2
u1
Co
u2
Co
À 1
RCo
0
B
B
B
@
1
C
C
C
A
; Bqi
¼
vi
L1
vi
L2
0
0
B
@
1
C
A
For each discrete mode, the corresponding values of the inputs
are given in Table 1.
The control design consists in the adequate state feedback
switching low design q(x) that orchestrates the switching among
the discrete modes to meet the control requirements. In closed
loop, the hybrid automaton H of the 2IBC, operating in CCM, can be
1980 1985 1990 1995 2000 2005 2010 2015
330
350
370
390
410
Years
CO2
(ppm)
Seasonal
Monthly
Fig. 1. Recent global monthly and seasonal mean CO2 in parts per million (ppm)
over marine surface sites (October 2015) [1].
Fig. 2. Topology of interleaved converter.
M. Bougrine et al. / ISA Transactions 66 (2017) 425–436426](https://image.slidesharecdn.com/load-estimator-based-hybrid-controller-design-for-two-interleav2017isa-tra-190321204112/75/Load-estimator-based-hybrid-controller-design-for-two-interleaved-boost-converter-dedicated-to-renewable-energy-and-automotive-applications-2-2048.jpg)
![represented by the following 6-tuple:
H ¼ ðQ; X; Sc; T; G; InitÞ ð3Þ
where Sc : ðQ Â XÞ↦R3
is the application that assigns to every discrete
mode a continuous dynamic given by (2). T ¼ fTij; i; jAf1; …; 4gg
represents a set of all possible transitions between discrete modes,
G : T-2X
associates to each transition a continuous set where the
transition is valid (called a guard condition), and InitDX Â Q gives the
initial states.
Based on (3) the switching design corresponds to the free
elements definition of the hybrid automaton ðT; G; InitÞ in order to
solve the stabilization problem discussed in the next subsection. In
the remainder of the paper, we will consider r1 ¼ r2 ¼ r and
L1 ¼ L2 ¼ L.
The control of interleaved boost converters addresses the reg-
ulation of the output voltage vo around the desired voltage Vref by
controlling the input current Iin around an average reference
generated by an outer loop as follows:
Iref ðtÞ ¼ INom
ref þ
Z t
0
K sgnðVref ÀvoðτÞÞ Vref ÀvoðτÞ
α
dτ ð4Þ
where K is a sufficiently large positive real number, αAð0; 1Þ is a
small coefficient to ensure a finite time settling, INom
ref ¼
V2
ref
Rvi
is the
nominal value of Iref in static steady-state out of model uncer-
tainties. To guarantee the balancing of the converter, the input
current must be shared between the two phases. Hence for the
2IBC, the phase currents must be regulated around the average
reference Irefk
¼ 0:5Iref .
On the other hand, it is clear from the hybrid nature of the
converter that the regulation of the phase currents can be
obtained in a cyclic manner. This means that in steady-state, the
converter trajectory converges to a limit cycle. The optimal limit
cycle is characterized by low input ripple which corresponds to the
following condition on the inputs:
1. The input signals have the same duty cycle d.
2. The phase shift between the two phases is equal to π.
The duty cycle d depends on the required output voltage as fol-
lows:
d ¼ 1À
vi ÀrIref
Vref
ð5Þ
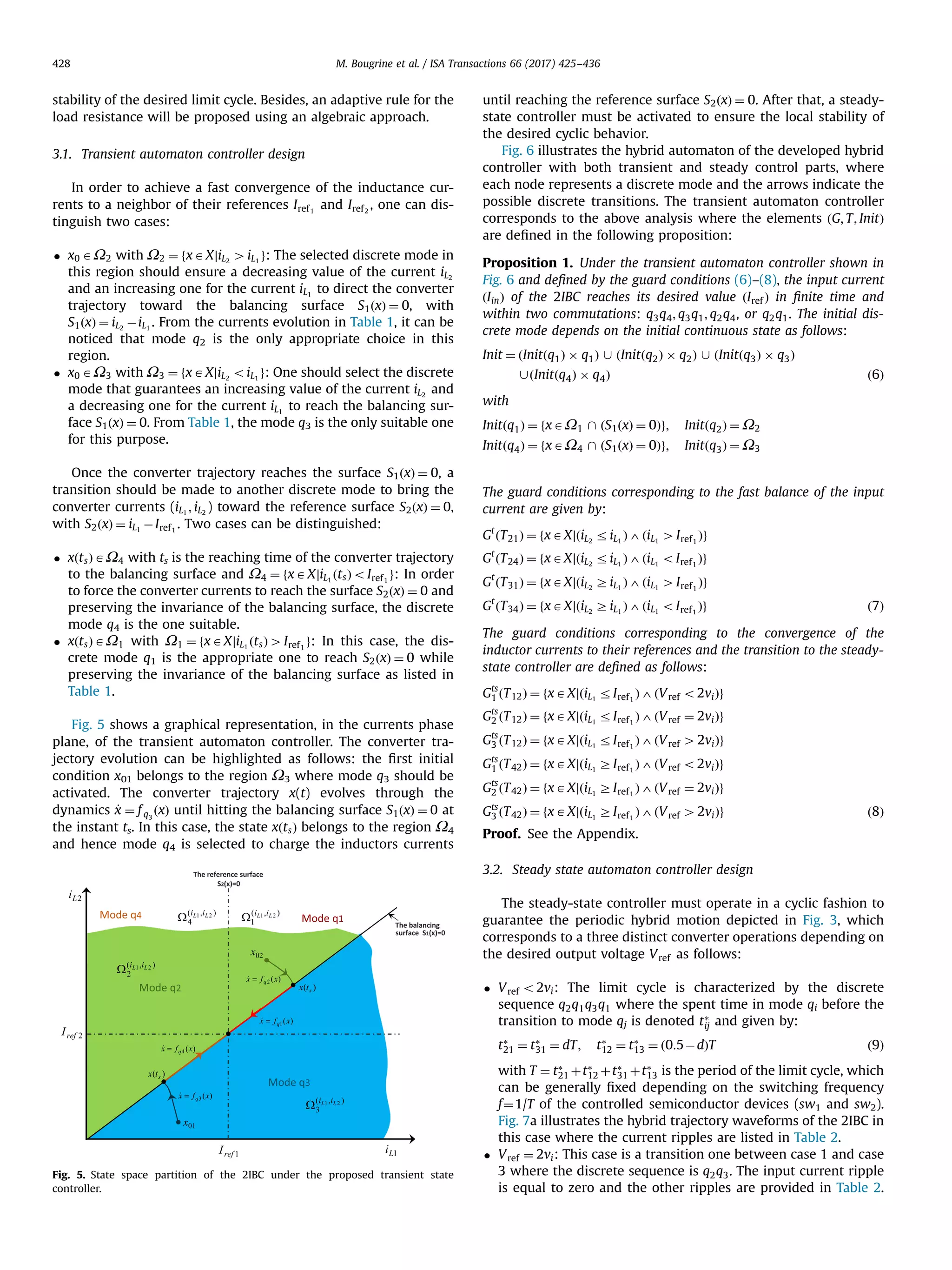
Fig. 3 illustrates the hybrid trajectory (x,q) of the 2IBC in the
currents phase plane ðiL1
; iL2
Þ for different duty cycle values and a
fixed desired phase shift ðϕ ¼ πÞ of the input signals. One can
remark that the periodic behavior of the input signals leads to a
cyclic hybrid trajectory, which is one of the important nonlinear
phenomena that may be exhibited by DC–DC power converters
[31]. Note that each phase shift leads to a specific limit cycle where
the optimal one, with respect to input current ripple, is shown in
Fig. 3. Therefore, it is more natural to consider the stabilization
problem of the 2IBC as follows.
Fast optimal limit cycle stabilization: Given the set of discrete
modes Q ¼ fq1; q2; q3; q4g, how should they be selected to guaran-
tee the fast stabilization of the predefined optimal limit cycle
depicted in Fig. 3 with a fast transient property?
This problem is not directly discussed using the continuous
dynamical systems theory. In the next section, we will solve the
above problem efficiently using hybrid systems theory.
3. Hybrid control design: main results
The formulated stabilization problem in the previous section
can be restated based on the closed loop hybrid model (3) as fol-
lows: (1) For a given initial condition x0, how one should select the
convenient discrete modes among the set Q to reach fast the
neighborhood of the optimal limit cycle shown in Fig. 3, and fast
balance of the input current among the two phases. (2) When the
neighborhood of the optimal limit cycle is reached, how to select
the discrete modes to ensure its local stabilization.
In the following, we design an adaptive hybrid controller, illu-
strated in Fig. 4, with two parts: A transient state automaton for
fast transition and a steady-state automaton for local asymptotic
Table 1
The discrete modes of the two interleaved boost converter and their equilibrium
points.
Discrete
modes
Input signals Currents
evolution
Equilibrium point
u1 u2 iL1
iL2 x
qi
eq
q1 0 0 ↘ ↘ vi
2Rþr
vi
2Rþr
2Rvi
2Rþr
!T
q2 1 0 ↗ ↘ vi
r
vi
Rþr
Rvi
Rþr
!T
q3 0 1 ↘ ↗ vi
Rþr
vi
r
Rvi
Rþr
!T
q4 1 1 ↗ ↗ vi
r
vi
r
0
h iT
Iref1
Iref2
1q
1q
2q
3q
Iref1
Iref2
2q
3q
Iref1
Iref2
3q
2q
4q
4q
Fig. 3. Projection of the desired limit cycle in the currents plane.
Fig. 4. The proposed adaptive hybrid control scheme for the interleaved boost
converter.
M. Bougrine et al. / ISA Transactions 66 (2017) 425–436 427](https://image.slidesharecdn.com/load-estimator-based-hybrid-controller-design-for-two-interleav2017isa-tra-190321204112/75/Load-estimator-based-hybrid-controller-design-for-two-interleaved-boost-converter-dedicated-to-renewable-energy-and-automotive-applications-3-2048.jpg)
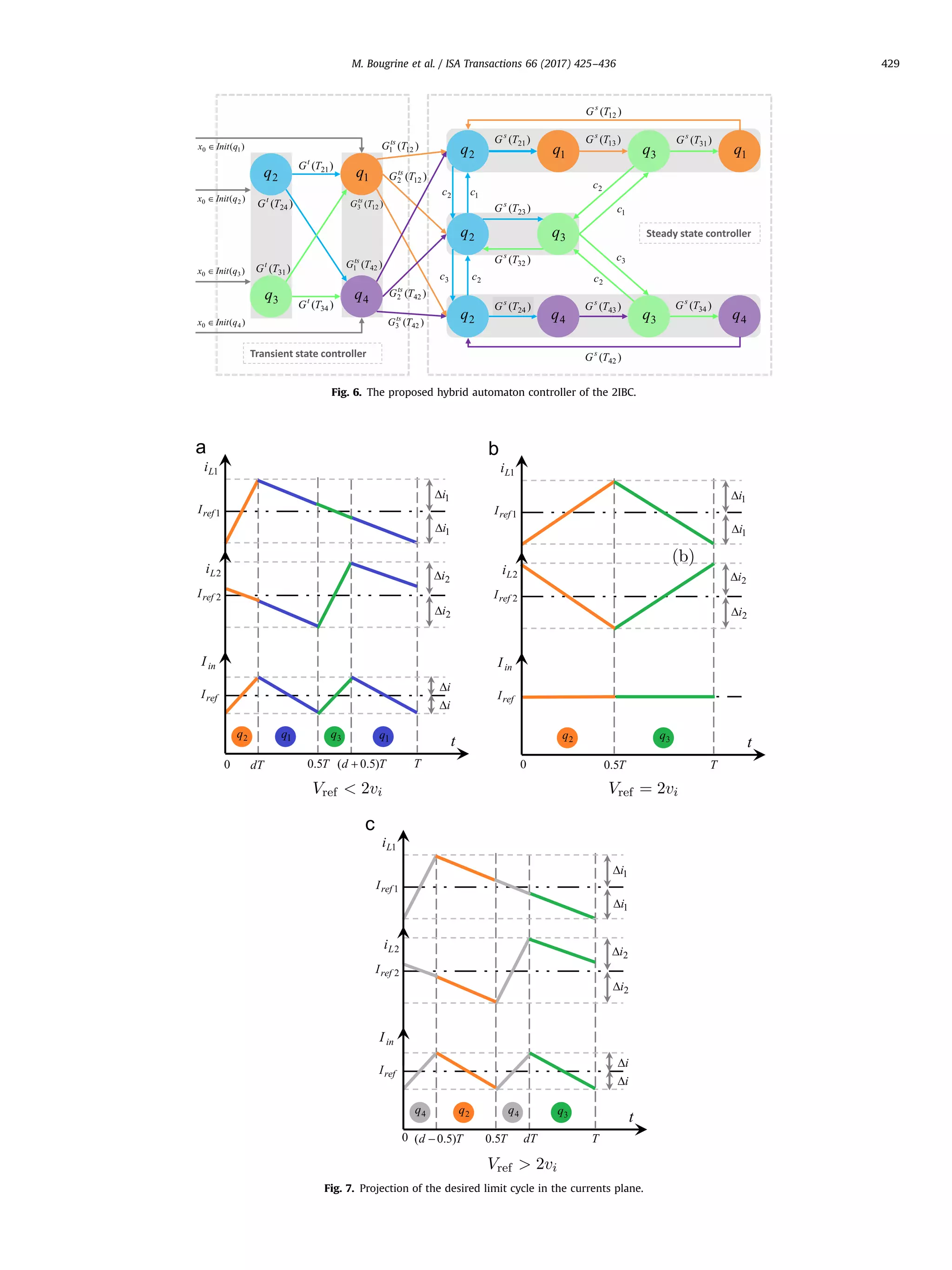
![The spent time in each mode is given by:
tÃ
23 ¼ tÃ
32 ¼ 0:5T; ð10Þ
The converter trajectory in steady-state is presented in Fig. 7b.
Vref 42vi: The converter trajectory waveforms are illustrated in
Fig. 7c where the limit cycle is defined by the discrete sequence
q2q4q3q4 with the following spent times:
tÃ
24 ¼ tÃ
34 ¼ ð1ÀdÞT; tÃ
42 ¼ tÃ
43 ¼ ðdÀ0:5ÞT ð11Þ
The corresponding current ripples are reported in Table 2.
From the above analysis, we note that the desired limit cycle is
completely defined by the discrete sequence and the spent times,
which depend on the desired switching frequency f, the input
voltage and the desired output voltage.
From the fact that the desired limit cycle has three geometric
shapes, one can conclude that the steady-state controller must
have three parts depending on the desired voltage Vref for a given
switching frequency and input voltage as proposed in Fig. 6. In
each part, we have the desired discrete sequence defined by a
closed unidirectional automaton where the guard conditions,
denoted Gs
ðTijÞ, should be designed to guarantee the local
asymptotic stability of the desired limit cycle. Transitions between
the three parts, denoted ci with iAf1; 2; 3g, occur if the reference
voltage is changed and does not meet the actual part. The condi-
tions c1; c2 and c3 are valid if the reference output voltage verifies
the conditions Vref o2vi; Vref ¼ 2vi and Vref 42vi respectively.
Proposition 2 outlines the steady-state controller of the 2IBC.
Proposition 2. Under the proposed steady-state controller in Fig. 6
with the guard conditions (12)–(14), the desired limit cycle of the
2IBC depicted in Fig. 3 is locally asymptotically stable.
Part 1 ðVref oviÞ:
Gs
ðT21Þ ¼ fxAX∣iL1
ZIref1
þΔi1g
Gs
ðT13Þ ¼ fxAX∣Iin rIref ÀΔig
Gs
ðT31Þ ¼ fxAX∣iL2
ZIref2
þΔi2g
Gs
ðT12Þ ¼ fxAX∣Iin rIref ÀΔig ð12Þ
Part 2 ðVref ¼ viÞ:
Gs
ðT23Þ ¼ fxAX∣iL2
rIref2
ÀΔi2g
Gs
ðT32Þ ¼ fxAX∣iL1
rIref1
ÀΔi1g ð13Þ
Part 3 ðVref 4viÞ:
Gs
ðT24Þ ¼ fxAX∣iL2
rIref2
ÀΔi2g
Gs
ðT43Þ ¼ fxAX∣Iin ZIref þΔig
Gs
ðT34Þ ¼ fxAX∣iL1
rIref1
ÀΔi1g
Gs
ðT42Þ ¼ fxAX∣Iin ZIref þΔig ð14Þ
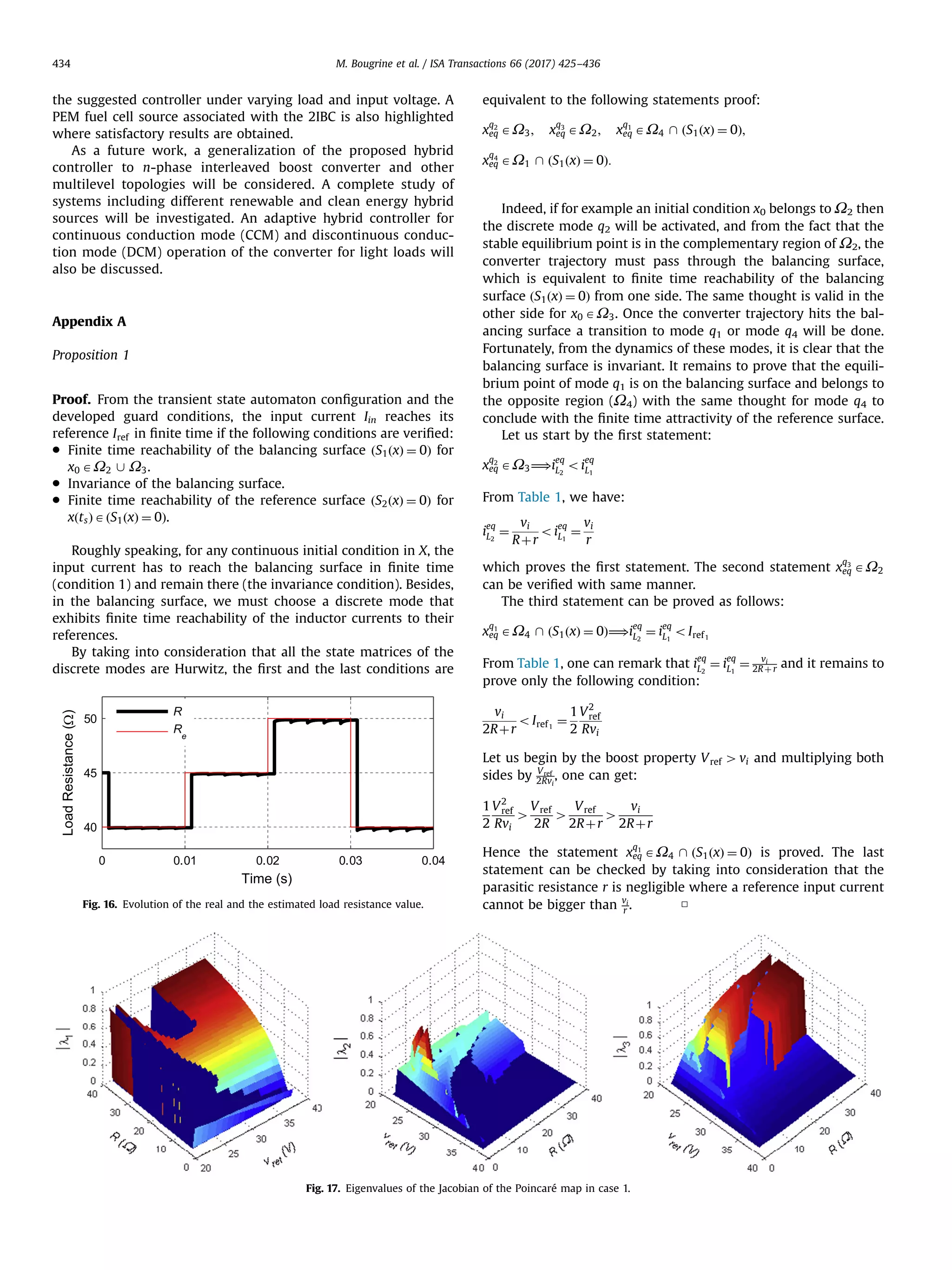
Proof. See Appendix.
The guard conditions (12)–(14) are obtained from the limit
cycle trajectory computation based on the dynamics of each dis-
crete mode. For example, let us consider the guard conditions
design in part 1 where the discrete sequence is q2q1q3q1.
For the discrete mode q2, the inductor current iL1
increases
(charging case) where an upper constraint ðIref1
þΔi1Þ is chosen.
Besides, the inductor current iL2
decreases (discharging case) but it
is not used due to the necessity of other intermediate ripple cal-
culation, which can be remarked in Fig. 7a. Furthermore, the input
current (Iin) is avoided because its dynamic depends on the con-
verter state. Using the same reasoning and by symmetry, the guard
condition Gs
ðT31Þ is obtained. In mode q1, the input current
decreases, which allows us to add the lower constraint ðIref ÀΔiÞ
for input current ðIinÞ in Gs
ðT12Þ and Gs
ðT13Þ. The same thought is
applied to part 2 and part 3 for the guards design.
The suggested hybrid controller shown in Fig. 6 and defined by
the guard conditions (6)–(8) for the transient part and (12)–(14)
for the steady part requires only one condition to be verified at
each instant to determine the next discrete mode, which is
attractive for practical implementations.
3.3. Adaptive rule based on an algebraic approach
From the guard conditions, the hybrid controller can be clas-
sified as a current control loop with the aim to maintain the
output voltage at a desired level. In fact, the used reference current
depends on the load resistance, which may affect the output vol-
tage regulation. For that purpose, an online estimation of the load
resistance should be developed for online adjustment of the
hybrid control scheme. We opt for algebraic techniques for the
load resistance estimation, which can be reliably achieved in real
time that depends only on the arithmetic precision of the used
processor [32–34].
Let us consider the output capacitor voltage dynamic:
voðtÞ
1
R
¼ ð1Àu1ðtÞÞiL1
ðtÞþð1Àu2ðtÞÞiL2
ðtÞÀCo
dvo
dt
ðtÞ
Using the Laplace transformation for each discrete mode and
taking into account that the control inputs are constant (u1ðtÞ ¼ u1
and u2ðtÞ ¼ u2), one can obtain:
1
R
voðsÞ ¼ ð1Àu1ÞiL1
ðsÞþð1Àu2ÞiL2
ðsÞÀCoðsvoðsÞÀvoð0ÞÞ
with s is the Laplace variable. To get rid of the initial condition
voð0Þ, we differentiate both sides with respect to s as follows:
1
R
dvo
ds
ðsÞ ¼ ð1Àu1Þ
diL1
ds
ðsÞþð1Àu2Þ
diL2
ds
ðsÞÀCoðvoðsÞþs
dvo
ds
ðsÞ
Time differentiations in this expression, i.e. multiplication by s in
the operational form, can be avoided by multiplying both sides by
a give power of sÀ1
. Moreover, as the integral plays the role of a
low-pass filter, one seeks relation in which every time-function
appears inside an integral in the time domain. By multiplication by
sÀ2
, one obtains:
1
s2
dvo
ds
ðsÞ
|fflfflfflfflffl{zfflfflfflfflffl}
nðsÞ
1
R
¼ ð1Àu1Þ
1
s2
diL1
ds
ðsÞþð1Àu2Þ
1
s2
diL2
ds
ðsÞÀCo
1
s2
voðsÞþ
1
s
dvo
ds
ðsÞ
|fflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflffl{zfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflfflffl}
dðsÞ
Returning to time domain using the inverse Laplace transforma-
tion, one gets an algebraic estimator of the load resistance:
Table 2
Different state ripples of 2IBC.
Ripples Δi1 Δi1 Δi
Case 1 vi ÀrIref1
2L
dT
vi ÀrIref2
2L
dT
Vref Àvi ÀrIref1
L
ð0:5ÀdÞT
Case 2 vi ÀrIref1
4L
T
vi ÀrIref2
4L
T
0
Case 3 Vref þrIref1
Àvi
2L
ð1ÀdÞT
Vref þrIref2
Àvi
2L
ð1ÀdÞT
vi ÀrIref1
L
ðdÀ0:5ÞT
M. Bougrine et al. / ISA Transactions 66 (2017) 425–436430](https://image.slidesharecdn.com/load-estimator-based-hybrid-controller-design-for-two-interleav2017isa-tra-190321204112/75/Load-estimator-based-hybrid-controller-design-for-two-interleaved-boost-converter-dedicated-to-renewable-energy-and-automotive-applications-6-2048.jpg)
![identification:
~RðtÞ ¼
nðtÞ
dðtÞ
ð15Þ
with:
nðtÞ ¼
Z T
0
ðT ÀσÞðÀσÞvoðtÀσÞdσ ð16aÞ
dðtÞ ¼
Z T
0
ðT ÀσÞ ðÀσÞ ð1Àu1ÞiL1
ðσÞþð1Àu2ÞiL1
ðσÞ
À Á
ÀCovoðσÞ
 ÃÂ
þCoσvoðσÞŠdσ ð16bÞ
This estimator is not asymptotic, it can be evaluated for any
t4T and give a real-time estimation of R. In practice, the integrals
appearing in (16) are calculated by discrete methods (e.g. the
trapezium rule) using a finite number of samples of iL1
, iL1
and vo in
the time-interval ½tÀT; tŠ.
4. Simulation results
For practical purposes, designing the converter parameters,
especially passive components, is of utmost importance. To this
end, it is necessary to reveal the existing links between the
switching frequency, the output voltage, the current and voltage
ripples, and the passive components. This has already been dis-
cussed in the literature. For brevity reasons, only the most
important equations will be mentioned.
In CCM operation, the minimal required values for the passive
components are obtained by considering the worst case in terms
of ripples, which corresponds to the duty cycles d¼0.25 and
d¼0.75. These are given by
Lmin ¼
vo
8ΔIin;CCM;max f
ð17aÞ
Cmin ¼
vo
4RminΔvo;CCM;max f
ð17bÞ
with the output voltage vo, the desired switching frequency f ¼ 1
T,
and the maximum allowed current ripple ΔIin;CCM;max and voltage
ripple Δvo;CCM;max. A typical converter with the parameters in
Table 3 will be studied in closed loop under the hybrid controller
presented in Fig. 6 and defined by the two propositions alongside
the adaptive rule equations (16)–(17). The initial value of the load
estimator R0 is fixed at 15 Ω where the evaluation starts after
ϵ¼0.5 ms and re-initialized each period Te ¼ 2 ms. Performance
and robustness of the adaptive hybrid controller will be checked
through different scenarios and tested with a fuel cell source in the
next subsections.
4.1. Variable reference output voltage
Fig. 8 illustrates the continuous state evolution of the 2IBC in
closed loop for a variable reference output voltage. At startup,
the reference input current Iref that corresponds to Vref ¼ 35 V is
calculated using (4), which is perturbed by the wrong value of
the estimated resistor load ðRe ¼ R0Þ. The hybrid controller forces
the input current to converge rapidly to Iref ¼ 4:08 A, as it can be
remarked from Fig. 8b, which justifies the overshoot in the
output voltage. After ϵ ¼ 0:5 ms, the algebraic estimator pro-
vides the real value of the load resistance, as illustrated in Fig. 9,
to the hybrid controller. The latter overcomes the situation and
stabilizes quickly the converter state around its reference
xref ¼ ½1:53 A 1:53 A 35 VŠT
. The reached limit cycle is depicted in
Fig. 10a, which has the discrete sequence q2q1q3q1. The current
ripples are obtained from Table 2 for a fixed frequency f¼10 Hz.
At t¼0.01 s, the reference voltage Vref is decreased by 5 V. The
hybrid controller allows us to bring the input current in finite time
to the new desired value Iref ¼ 2:25 A and forces the converter
trajectory to converge to the optimal limit cycle using part 1 of the
steady-state controller as it can be observed from the used discrete
modes in Fig. 10b. In the interval [0.02 s, 0.03 s], the reference
voltage is set to 40 V. The hybrid controller uses part 2 of the
steady-state controller to stabilize the optimal limit cycle in this
case as shown in Fig. 10c, which contains only the discrete modes
q2 and q3. It should be noted that the input current ripple is equal
to zero as it can be remarked from the currents evolution in
Table 3
Converter parameters.
Parameter vi L; r Co f R0
Value 20 V 3.3 mH, 1 mΩ 23 μF 10 kHz 15 Ω
Fig. 8. State evolution of the 2IBC for a variable load resistance.
Fig. 9. Load estimation based on the algebraic approach.
M. Bougrine et al. / ISA Transactions 66 (2017) 425–436 431](https://image.slidesharecdn.com/load-estimator-based-hybrid-controller-design-for-two-interleav2017isa-tra-190321204112/75/Load-estimator-based-hybrid-controller-design-for-two-interleaved-boost-converter-dedicated-to-renewable-energy-and-automotive-applications-7-2048.jpg)
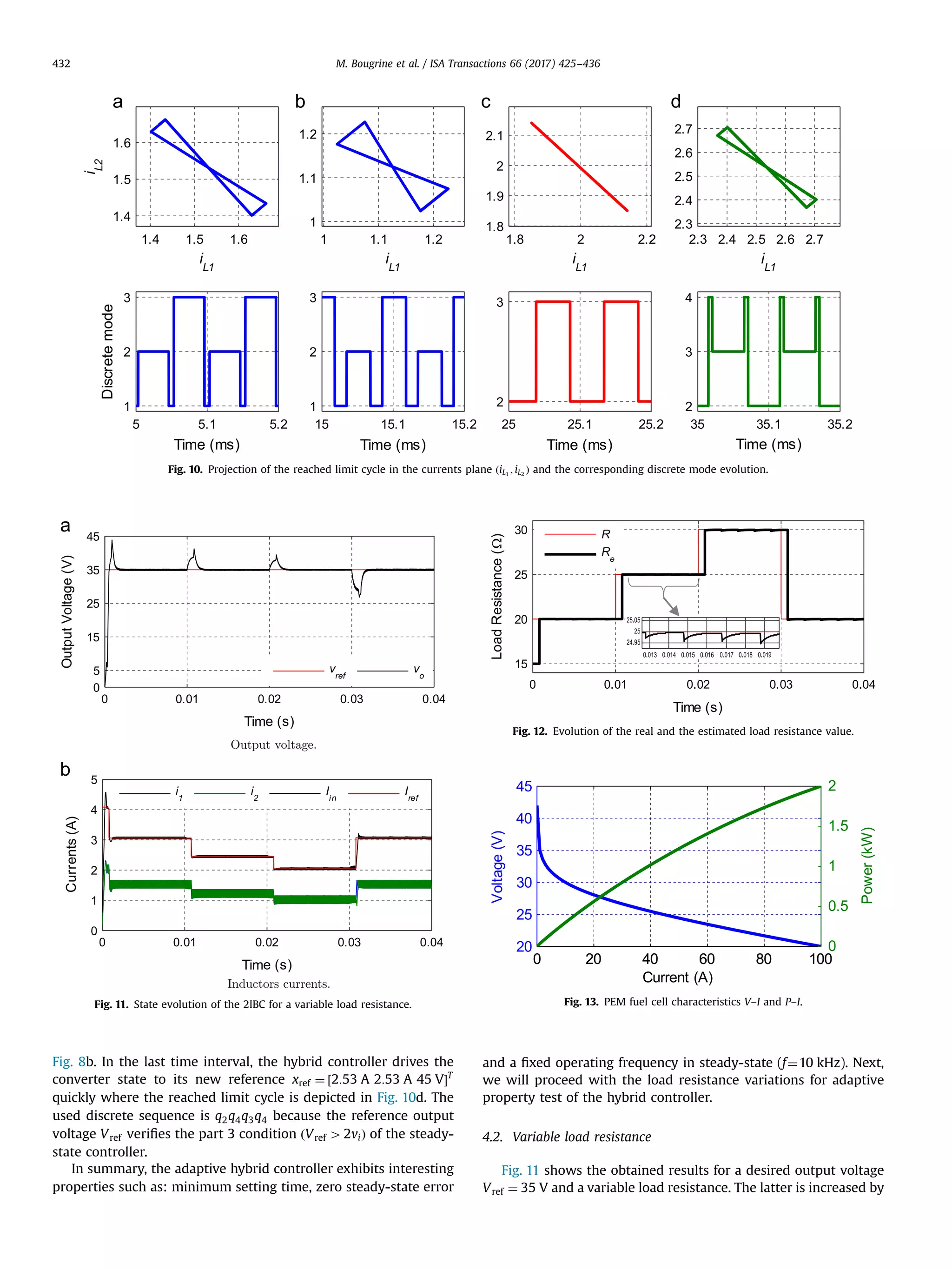
![5 Ω from 20 Ω to 30 Ω each 10 ms and decreased by 10 Ω at the
instant 30 ms. Fig. 9 shows the algebraic estimator response under
these disturbances. The algebraic estimator tries to detect and
reject any load variation by the re-initialization of the algebraic
formulae each 2 ms, which is clear from the periodic small over-
shoots in Fig. 12. Once the load resistance is estimated, the hybrid
controller will be updated by a new corrected reference input
current to reject the load perturbation. The obtained results
illustrate the effectiveness and the robustness of the hybrid con-
troller in spite of these fast variations.
4.3. Association of the 2IBC with a fuel cell source
Fuel cell systems are increasingly used in the last decade in
automotive applications, which are classified as clean energy with
zero CO2 emission. In this part, we consider an example of 1.26 kW
proton exchange membrane (PEM) fuel cell with the P–I and V–I
characteristics shown in Fig. 13, which is provided in MATLAB
s
SIMPOWER toolbox.
Fig. 14 illustrates the 2IBC state evolution for the output voltage
reference and a variable load resistance. One can remark that the
fuel cell Vref ¼ 80 V has a minimal ripple in different phases of load
variations. The adaptive hybrid controller is able to drive the
converter state x to its reference quickly and with a good tracking.
The robustness of the controller despite load variations is clearly
observed (Fig. 16). The closed loop maintains the control require-
ments in spite of fuel cell stack voltage variations presented in Fig.
15.
Table 4 shows a qualitative comparison between the proposed
control scheme based on hybrid automata theory and some other
existing control strategies for the conventional boost converter
and the interleaved one. One may read the proposed controller as
an extension for the interleaved case of the controller presented in
[35] for the conventional boost converter. The problem of the
phase shifting between the control signals that does not show up
in the conventional boost has been solved implicitly for the two-
interleaved converter by considering a limit cycle stabilization
problem in CCM. However, the case of DCM is beyond the scope of
this paper and will be dealt with in future work.
5. Conclusions and future works
In this paper, a new adaptive hybrid control scheme is devel-
oped for the asymptotic stabilization of the desired limit cycle of
two phase interleaved boost converter. From practical point of
view, this corresponds to fast transient and low input current
achievements, which is advantageous for many real world appli-
cations such as: fast MPPT with low fluctuations around the
maximum power point, extended lifetime of fuel cell system and
solar panels, high efficiency and enhanced thermal properties of
the converter, etc.
The controller is developed via a hybrid automaton formalism
with two parts: (1) a transient state automaton for fast transient
and (2) a steady-state automaton for local limit cycle stabilization.
An online adaptive rule based on the algebraic approach is also
investigated for robustness purpose. Mathematical proofs and
simulation results confirm the effectiveness and the robustness of
Fig. 14. State evolution of the 2IBC associated with fuel cell source under a variable
load resistance.
Fig. 15. Fuel cell stack voltage.
Table 4
Qualitative comparison.
Previous works Control Model nature Phase shift Studied
modes
Complexity Applicability
Giral et al. [36] Sliding mode-based Instantaneous model Enforced in OL with latch CCM Medium Two-interleaved
Hubber et al. [37] Open loop control Instantaneous model Enforced in OL with delay CCM/DCM Simple Two-interleaved
Thammasiriroj et al. [38] Flatness-based Average model Enforced in OL with PWM CCM Very high N-interleaved
Sreekumar and Agarwal
[35]
Limit cycle
stabilization
Hybrid model – CCM/DCM Simple Conventional DC–DC
boost
Proposed controller Limit cycle
stabilization
Hybrid model Controlled in CL by the limit cycle
stabilization
CCM Medium Two-interleaved
M. Bougrine et al. / ISA Transactions 66 (2017) 425–436 433](https://image.slidesharecdn.com/load-estimator-based-hybrid-controller-design-for-two-interleav2017isa-tra-190321204112/75/Load-estimator-based-hybrid-controller-design-for-two-interleaved-boost-converter-dedicated-to-renewable-energy-and-automotive-applications-9-2048.jpg)
![Proposition 2
Proof. The local stability of the desired limit cycle can be proved
using the following theorem [39], and the reader may refer to
[40,41,35] for more detail and for various applications to multi-
level and classical power converters.
Theorem 1. Consider a general piecewise linear system with the
form given by (1). Assume that there exists a limit cycle γ with period
T, and defined by the discrete sequence q1q2…qN. Guard condition
between mode qi to mode qj, denoted GðTijÞ, is given by a hyperplane
of dimension nÀ1 as follows:
GðTijÞ ¼ fxAX∣Cijxþdij ¼ 0g ð18Þ
with Cij AR1Ân
and dij AR.
The stability analysis of the limit cycle γ can be checked by looking
at the eigenvalues of the Jacobian of the Poincaré map P as follows:
dP ¼ dPk1…dP34dP23dP12 with dPij ¼ IÀ
f qi
ðxÃ
ijÞCij
Cijf qi
ðxÃ
ijÞ
!
eAitÃ
ij ð19Þ
where xÃ
ij is the switching state between mode qi and mode qj, which
belongs to the guard condition GðTijÞ. The local stability of the limit
cycle γ can be checked as follows:
If the map dP has all its eigenvalues inside the unit circle, then the
limit cycle γ is locally asymptotic stable.
If at least one of the eigenvalues is outside the unit circle, then the
limit cycle γ is unstable.
We will use this theorem to prove the local stability of the
desired limit cycle under the proposed hybrid steady-state con-
troller in the following three cases.
Case 01 ðVref o2viÞ: In this case, the Jacobian of the Poincaré
map that corresponds to the discrete sequence q2q1q3q1 is
dP ¼ dP12dP31dP13dP21. Transitions between the discrete modes of
the discrete sequence occurs in 2-dimensional hyperplanes
respecting (18), which can be defined using (12) as follows:
C12 ¼ ½1 1 0Š; d12 ¼ ÀðIref ÀΔiÞ
C31 ¼ ½0 1 0Š; d31 ¼ ÀðIref2
þΔi2Þ
C13 ¼ ½1 1 0Š; d13 ¼ ÀðIref ÀΔiÞ
C21 ¼ ½1 0 0Š; d21 ¼ ÀðIref1
þΔi1Þ
8
:
The switching points between the discrete modes of the desired
limit cycle are given as follows:
xÃ
12 ¼ ½Iref1
ÀΔi1; Iref2
þΔi1 ÀΔi; Vref þΔvŠT
xÃ
31 ¼ ½Iref1
ÀΔi2 þΔi; Iref2
þΔi2; Vref ÀΔvŠT
xÃ
13 ¼ ½Iref1
þΔi2 þΔi; Iref2
ÀΔi2; Vref þΔvŠT
xÃ
21 ¼ ½Iref1
þΔi1; Iref2
ÀΔi1 þΔi; Vref ÀΔvŠT
8
:
Replacing these results and the corresponding discrete mode
dynamic in (19), one can get the Jacobian of the Poincaré map.
Using the converter parameters in Table 3, the eigenvalues of dP
are evaluated numerically for a variable reference voltage ðVref o
2viÞ and load resistance, which are depicted in Fig. 17. All the
eigenvalues are inside the unit circle, which proves the local sta-
bility of the desired limit cycle under the proposed steady-state
controller in this case.
Case 02 ðVref ¼ 2viÞ: In this case, the discrete sequence q2q3 has
the Jacobian of the Poincaré map dP ¼ dP32dP23. The switching
surfaces in the form (18) and the switching points are given as
Fig. 18. Eigenvalues of the Jacobian of the Poincaré map in case 2.
Fig. 19. Eigenvalues of the Jacobian of the Poincaré map in case 3.
M. Bougrine et al. / ISA Transactions 66 (2017) 425–436 435](https://image.slidesharecdn.com/load-estimator-based-hybrid-controller-design-for-two-interleav2017isa-tra-190321204112/75/Load-estimator-based-hybrid-controller-design-for-two-interleaved-boost-converter-dedicated-to-renewable-energy-and-automotive-applications-11-2048.jpg)
![follows:
C32 ¼ ½1 0 0Š; d12 ¼ ÀðIref1
ÀΔi1Þ
C23 ¼ ½0 1 0Š; d31 ¼ ÀðIref2
ÀΔi2Þ
(
xÃ
32 ¼ ½Iref1
ÀΔi1; Iref2
þΔi2; Vref ŠT
xÃ
23 ¼ ½Iref1
þΔi1; Iref2
ÀΔi2; Vref ŠT
(
Fig. 18 illustrates that all the eigenvalues of the dP are inside
the unit circle for varying load resistance, which proves the local
stability of the desired limit cycle in this case.
Case 03 ðVref 42viÞ: The desired limit cycle has the discrete
sequence q2q4q3q4 where its Jacobian of the Poincaré map is
dP ¼ dP42dP34dP43dP24. From the guard conditions given by (14),
one can get the following switching surfaces parameters:
C42 ¼ ½1 1 0Š; d42 ¼ ÀðIref þΔiÞ
C34 ¼ ½1 0 0Š; d34 ¼ ÀðIref1
ÀΔi1Þ
C43 ¼ ½1 1 0Š; d43 ¼ ÀðIref þΔiÞ
C24 ¼ ½0 1 0Š; d24 ¼ ÀðIref2
ÀΔi2Þ
8
:
The switching points between the discrete modes of the desired
limit cycle are given as follows:
xÃ
42 ¼ ½Iref1
þΔi1; Iref2
ÀΔi1 þΔi; Vref ÀΔvŠT
xÃ
34 ¼ ½Iref1
ÀΔi1; Iref2
þΔi1 ÀΔi; Vref þΔvŠT
xÃ
43 ¼ ½Iref1
ÀΔi2 þΔi; Iref2
þΔi2; Vref ÀΔvŠT
xÃ
24 ¼ ½Iref1
þΔi2 ÀΔi; Iref2
ÀΔi2; Vref þΔvŠT
8
:
Fig. 19 shows that all the eigenvalues of the dP are inside the
unit circle for different values of Vref 42vi and varying load
resistance, which proves the local stability of the desired limit
cycle in this case.
References
[1] Dlugokencky E, Tans P. Trends in atmospheric carbon dioxide. National
Oceanic Atmospheric Administration (NOAA); 2015. URL 〈http://www.esrl.
noaa.gov/gmd/ccgg/trends/global.html〉.
[2] Khosroshahi A, Abapour M, Sabahi M. Reliability evaluation of conventional
and interleaved DC/DC boost converters. IEEE Trans Power Electron 2015;30
(10):5821–8.
[3] Wang C. Investigation on interleaved boost converters and applications [Ph.D.
thesis]. Virginia Polytechnic Institute and State University, USA; 2009.
[4] Bouafassa A, Rahmani L, Mekhilef S. Design and real time implementation of
single phase boost power factor correction converter. ISA Trans 2015;55:267–
74.
[5] Komurcugil H. Adaptive terminal sliding-mode control strategy for DC–DC
buck converters. ISA Trans 2012;51(6):673–81.
[6] Kolli A, Gaillard A, De Bernardinis A, Bethoux O, Hissel D, Khatir Z. A review on
DC/DC converter architectures for power fuel cell applications. Energy Convers
Manag 2015;105:716–30.
[7] Garrigós A, Sobrino-Manzanares F. Interleaved multi-phase and multi-switch
boost converter for fuel cell applications. Int J Hydrog Energy 2015;40
(26):8419–32.
[8] Ahmed O, Bleijs J. An overview of DC–DC converter topologies for fuel cell-
ultracapacitor hybrid distribution system. Renew Sustain Energy Rev
2015;42:609–26.
[9] Somkun S, Sirisamphanwong C, Sukchai S. A DSP-based interleaved boost DC–
DC converter for fuel cell applications. Int J Hydrog Energy 2015;40(19):6391–
404.
[10] Khadmun W, Subsingha W. High voltage gain interleaved DC boost converter
application for photovoltaic generation system. Energy Procedia 2013;34:390–
8.
[11] Thounthong P, Davat B. Study of a multiphase interleaved step-up converter
for fuel cell high power applications. Energy Convers Manag 2010;51(4):826–
32.
[12] Lopez T, Elferich R, Alarcon E. Voltage regulators for next generation micro-
processors. NY, USA: Springer; 2010.
[13] Su JT, Liu W. Gain scheduling control scheme for improved transient response
of DC/DC converters. IET Power Electron 2012;5(14):678–92.
[14] El Fadil H, Giri F. Robust nonlinear adaptive control of multiphase synchronous
buck power converters. Control Eng Pract 2009;17(11):1245–54.
[15] Lee K, Wei J, Xu M, Lee FC. Adaptive bus voltage positioning system for two
stage laptop voltage regulators. In: Proceedings of the IEEE power electronics
specialists conference (PESC'07); 2007. p. 2–8.
[16] Benyahia N, Denoun H, Zaouia M, Rekioua T, Benamrouche N. Power system
simulation of fuel cell and supercapacitor based electric vehicle using an
interleaving technique. Int J Hydrog Energy 2015;40(45):15806–14.
[17] Melo RR, Antunes FLM, Daher S. Bidirectional interleaved DC–DC converter for
supercapacitor-based energy storage systems applied to microgrids and elec-
tric vehicles. In: Proceedings of the 16th European conference on power
electronics and application (EPE'14); 2014. p. 1–10.
[18] Ni L, Patterson DJ, Hudgins JL. High power current sensorless bidirectional 16-
phase interleaved DC–DC converter for hybrid vehicle application. IEEE Trans
Power Electron 2012;27(3):1141–51.
[19] Park S, Song Y. An interleaved half-bridge bidirectional DC–DC converter for
energy storage system applications. In: Proceedings of the IEEE 8th interna-
tional conference on power electronics (ICPE'11); 2011. p. 2029–34.
[20] Ha D-H, Ju Park N, Lee K-J, Lee D-G, Seok Hyun D. Interleaved bidirectional
DC–DC converter for automotive electric systems. In: Proceedings of the IEEE
Industry Applications Society Annual Meeting (IAS'08); 2008. p. 1–5.
[21] Magne P, Liu P, Bilgin B, Emadi A. Investigation of impact of number of phases
in interleaved DC–DC boost converter. In: Proceedings of the IEEE transpor-
tation electrification conference and expo (ITEC'15); 2015. p. 1–6.
[22] Benrabeh A, Khoucha F, Herizi O, Benbouzid MEH, Kheloui A. FC/battery
power management for electric vehicle based interleaved DC–DC boost con-
verter topology. In: Proceedings of the 15th European conference on power
electronics and applications (EPE'13); 2013. p. 1–9.
[23] Benyahia N, Denoun H, Badji A, Zaouia M, Rekioua T, Benamrouche N, et al.
MPPT controller for an interleaved boost DC–DC converter used in fuel cell
electric vehicles. Int J Hydrog Energy 2014;39(27):15196–205.
[24] Zahra Mirbagheri S, Mekhilef S, Mirhassani SM. MPPT with inc.cond method
using conventional interleaved boost converter. Energy Procedia 2013;42:24–
32.
[25] Genc N, Iskender I. An improved soft switched PWM interleaved boost AC–DC
converter. Energy Convers Manag 2011;52(1):403–13.
[26] Chandrasekaran S, Gokdere LU. Integrated magnetics for interleaved DC–DC
boost converter for fuel cell powered vehicles. In Proceedings of the IEEE 35th
annual power electronics specialists conference (PESC'04), vol. 1; 2004. p.
356–61.
[27] Fadil HE, Giri F, Guerrero JM. Adaptive sliding mode control of interleaved
parallel boost converter for fuel cell energy generation system. Math Comput
Simul 2013;91:193–210.
[28] Karamanakos P, Geyer T, Manias S. Model predictive control of the interleaved
DC–DC boost converter with coupled inductors. In: Proceedings of the 15th
European conference on power electronics and application (EPE'13); 2013. p.
1–10.
[29] Zou Z, Cao J, Cao B, Chen W. Evaluation strategy of regenerative braking
energy for supercapacitor vehicle. ISA Trans 2015;55:234–40.
[30] Liccardo F, Marino P, Torre G, Triggianese M. Interleaved DC–DC converters for
photovoltaic modules. In: Proceedings of the international conference on
clean electrical power (ICCEP'07); 2007. p. 201–7.
[31] Banerjee S, Verghese GC. Nonlinear phenomena in power electronics: bifur-
cations, chaos, control, and applications. NY, USA: Wiley, IEEE Press; 2001.
[32] Fliess M, Sira-Ramírez H. Closed-loop parametric identification for
continuous-time linear systems via new algebraic techniques. In: Garnier H,
Wang L, editors. Identification of continuous-time models from sampled data,
advances in industrial control. London: Springer; 2008. p. 363–91.
[33] Fliess M, Join C, Sira-Ramírez H. Complex continuous nonlinear systems: their
black box identification and their control. In: Proceedings of the 14th IFAC
symposium on system identification (SYSID 2006). Newcastle, Australia; 2006.
[34] Sira-Ramírez H, Garcia-Rodriguez C, Cortés-Romero J, Luviano-Juarez A.
Algebraic identification and estimation methods in feedback control systems.
West Sussex, UK: Wiley; 2014.
[35] Sreekumar C, Agarwal V. A hybrid control algorithm for voltage regulation in
DC/DC boost converter. IEEE Trans Ind Electron 2008;55(6):2530–8.
[36] Giral R, Martinez-Salamero L, Leyva R, Maixe J. Sliding-mode control of
interleaved boost converters. IEEE Trans Circuits Syst I: Fundam Theory Appl
2000;47(9):1330–9.
[37] Huber L, Irving BT, Jovanovic MM. Open-loop control methods for interleaved
DCM/CCM boundary boost PFC converters. IEEE Trans Power Electron 2008;23
(4):1649–57. http://dx.doi.org/10.1109/TPEL.2008.924611.
[38] Thammasiriroj W, Chunkag V, Phattanasak M, Pierfederici S, Davat B,
Thounthong P. Nonlinear single-loop control of the parallel converters for a
fuel cell power source used in DC grid applications. Int J Electr Power Energy
Syst 2015;65:41–8.
[39] Goncalves J. Constructive global analysis of hybrid systems [Ph.D. thesis].
Cambridge, MA: Massachusetts Institute of Technology; 2000.
[40] Benmiloud M, Benalia A. Finite-time stabilization of the limit cycle of two-cell
DC/DC converter: hybrid approach. Nonlinear Dyn 2015:1–14.
[41] Benmiloud M, Benalia A, Defoort M, Djemai M. On the limit cycle stabilization
of a DC/DC three-cell converter. Control Eng Pract 2016;49:29–41.
M. Bougrine et al. / ISA Transactions 66 (2017) 425–436436](https://image.slidesharecdn.com/load-estimator-based-hybrid-controller-design-for-two-interleav2017isa-tra-190321204112/75/Load-estimator-based-hybrid-controller-design-for-two-interleaved-boost-converter-dedicated-to-renewable-energy-and-automotive-applications-12-2048.jpg)

This research article presents the design of a hybrid controller for a two-interleaved boost converter aimed at renewable energy and automotive applications, focusing on fast transient response and low input current ripple. The proposed controller uses a hybrid automaton formalism to stabilize a predefined optimal limit cycle and includes real-time load estimation for adaptive control. Simulations demonstrate the controller's effectiveness and robustness against disturbances, highlighting its application in fuel cell systems.












































![[IJET V2I5P10] Authors: Vinith Das, Dr. Babu Paul, Prof. Elizabeth Seba stian](https://cdn.slidesharecdn.com/ss_thumbnails/ijet-v2i5p10-161107141332-thumbnail.jpg?width=640&height=640&fit=bounds)