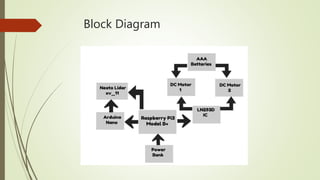
The document discusses the development of a lidar-based obstacle detection system integrated with emergency brake assistance, aimed at enhancing autonomous RC vehicles to prevent accidents. It outlines the design process, hardware components, software analysis using ROS and Python, and provides simulations and results for different scenarios. Future enhancements include integration with advanced driver assistance systems (ADAS) and weight reduction for the RC model car.