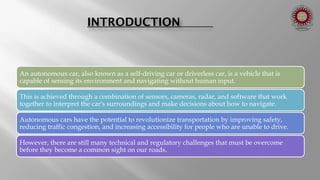
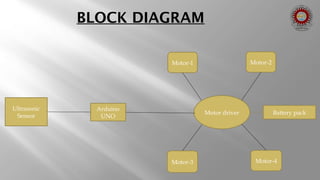
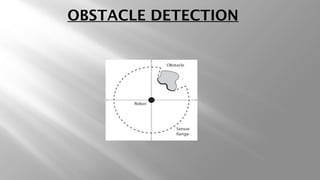
The document presents a project on developing an autonomous car using Arduino, focusing on its components, functionalities, and obstacle detection capabilities. It highlights the integration of sensors and motor controls for navigation without human intervention, along with potential applications in various fields. Future enhancements could involve adding a camera and GPS module for improved functionality.












![PPT On IOT BasedAutomatic Bumper [Autosaved].pptx](https://cdn.slidesharecdn.com/ss_thumbnails/pptoniotbasedautomaticbumperautosaved-240315163352-7fb59c2d-thumbnail.jpg?width=640&height=640&fit=bounds)



































