Downloaded 124 times

![- 18 -
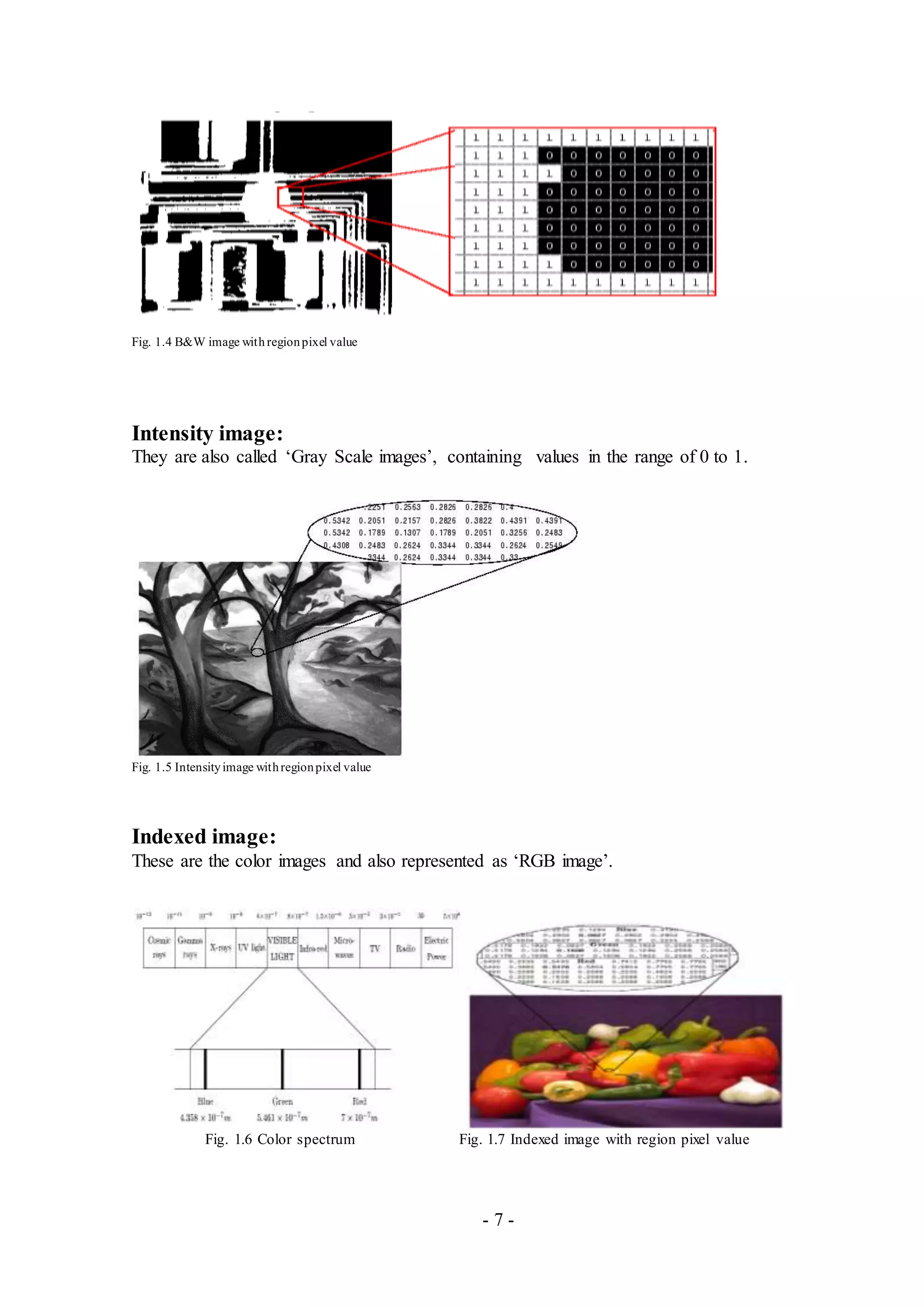
An introduction to Arduino IDE
The Arduino integrated development environment (IDE) is a cross-platform application written
in Java, and is derived from the IDE for the Processing programming language and
the Wiring projects. It is designed to introduce programming to artists and other newcomers
unfamiliar with software development. It includes a code editor with features such as syntax
highlighting, brace matching, and automatic indentation, and is also capable of compiling and
uploading programs to the board with a single click. A program or code written for Arduino is
called a "sketch".
Arduino programs are written in C or C++. The Arduino IDE comes with a software library called
"Wiring" from the original Wiring project, which makes many common input/output operations
much easier. Users only need define two functions to make a runnable cyclic executive program:
setup(): a function run once at the start of a program that can initialize settings
loop(): a function called repeatedly until the board powers off
#define LED_PIN 13
void setup () {
pinMode (LED_PIN, OUTPUT); // Enable pin 13 for digital output
}
void loop () {
digitalWrite (LED_PIN, HIGH); // Turn on the LED
delay (1000); // Wait one second (1000 milliseconds)
digitalWrite (LED_PIN, LOW); // Turn off the LED
delay (1000); // Wait one second
}
It is a feature of most Arduino boards that they have an LED and load resistor connected between
pin 13 and ground, a convenient feature for many simple tests.[9] The previous code would not be
seen by a standard C++ compiler as a valid program, so when the user clicks the "Upload to I/O
board" button in the IDE, a copy of the code is written to a temporary file with an extra include
header at the top and a very simple main() function at the bottom, to make it a valid C++ program.](https://image.slidesharecdn.com/ccd30660-5031-44f9-a236-c4de61b893b7-150308124157-conversion-gate01/75/MAJOR-PROJECT-18-2048.jpg)





![- 39 -
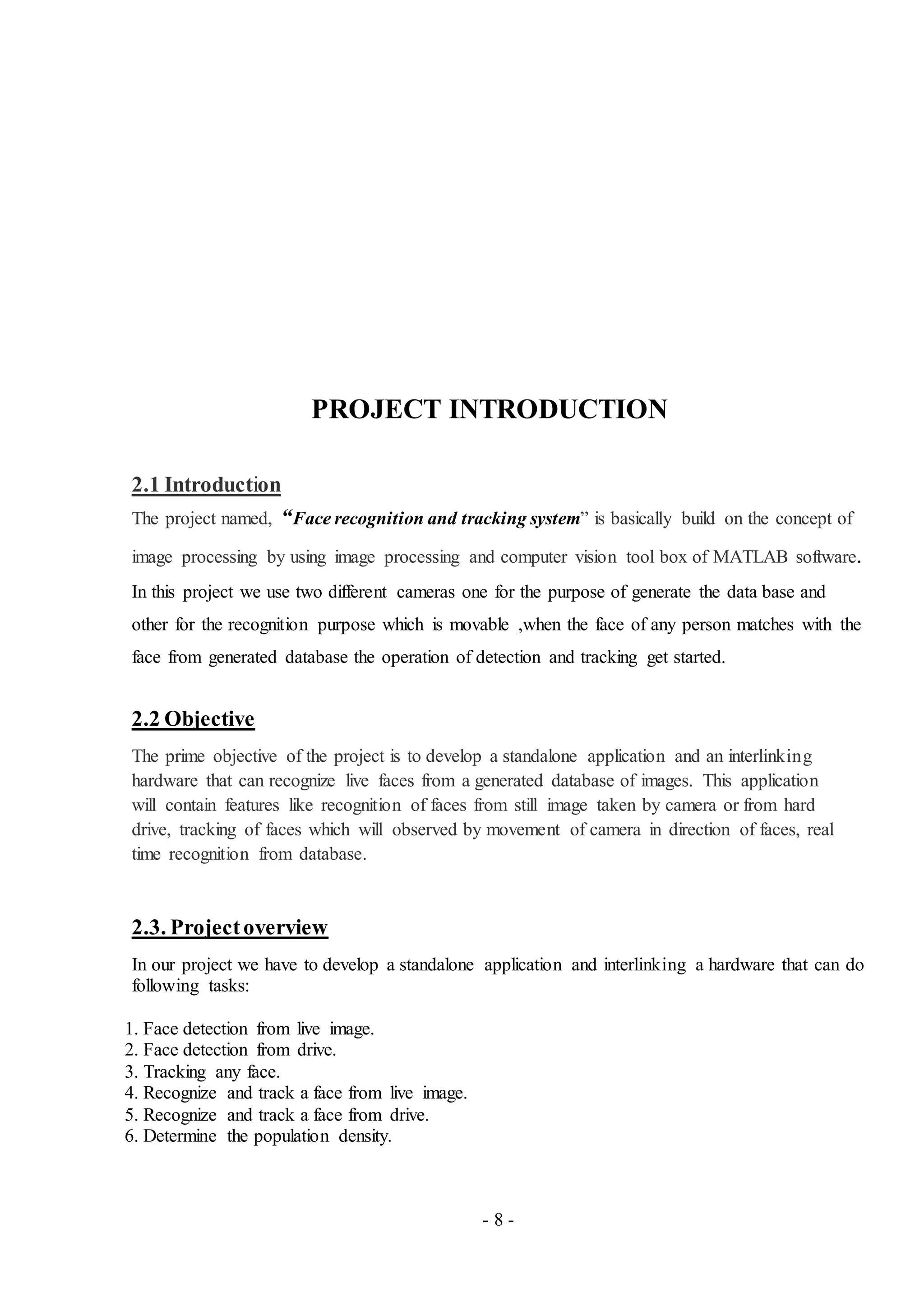
%% config_arduino.m– for configuring Arduino board
function config_arduino() %function for configuring arddino board
global b %global arduino class object
b=arduino('COM29');
b.pinMode(4,'OUTPUT'); % pin 4&5 for right & left and pin 6&7 for up & down
b.pinMode(5,'OUTPUT');
b.pinMode(6,'OUTPUT');
b.pinMode(7,'OUTPUT');
b.pinMode(2,'OUTPUT');
b.pinMode(3,'OUTPUT');
b.pinMode(8,'OUTPUT');
b.pinMode(9,'OUTPUT');
b.pinMode(10,'OUTPUT');
b.pinMode(11,'OUTPUT');
b.pinMode(12,'OUTPUT');
b.pinMode(13,'OUTPUT'); % pin 2,3,8,9,10,11,12,13 for seven segment display 8 leds
b.pinMode(14,'OUTPUT');
b.pinMode(15,'OUTPUT');
b.pinMode(16,'OUTPUT');
b.pinMode(17,'OUTPUT'); % pin 14,15,16,17 for multiplexing 4 seven segment display
end
%% recognize_face_drive.m– function for matching face using Eigenface
algorithm from hard drive
% Thanks to Santiago Serrano
function Min_id = recognize_face_drive(M)
close all
clc
% number of images on your training set.
%Chosen std and mean.
%It can be any number that it is close to the std and mean of most of the images.
um=100;
ustd=80;
person_no=0;
times=5;
%read and show images(bmp);
S=[]; %img matrix
figure(1);
for i=1:M
str=strcat(int2str(i),'.jpg'); %concatenates two strings that form the name of the image
eval('img=imread(str);');](https://image.slidesharecdn.com/ccd30660-5031-44f9-a236-c4de61b893b7-150308124157-conversion-gate01/75/MAJOR-PROJECT-39-2048.jpg)
![- 40 -
%eval('img=rgb2gray(image);');
subplot(ceil(sqrt(M)),ceil(sqrt(M)),i)
imshow(img)
if i==3
title('Training set','fontsize',18)
end
drawnow;
[irow icol]=size(img); % get the number of rows (N1) and columns (N2)
temp=reshape(img',irow*icol,1); %creates a (N1*N2)x1 matrix
S=[S temp]; %X is a N1*N2xM matrix after finishing the sequence
%this is our S
end
%Here we change the mean and std of all images. We normalize all images.
%This is done to reduce the error due to lighting conditions.
for i=1:size(S,2)
temp=double(S(:,i));
m=mean(temp);
st=std(temp);
S(:,i)=(temp-m)*ustd/st+um;
end
%show normalized images
figure(2);
for i=1:M
str=strcat(int2str(i),'.jpg');
img=reshape(S(:,i),icol,irow);
img=img';
eval('imwrite(img,str)');
subplot(ceil(sqrt(M)),ceil(sqrt(M)),i)
imshow(img)
drawnow;
if i==3
title('Normalized Training Set','fontsize',18)
end
end
%mean image;
m=mean(S,2); %obtains the mean of each row instead of each column
tmimg=uint8(m); %converts to unsigned 8-bit integer. Values range from 0 to 255
img=reshape(tmimg,icol,irow); %takes the N1*N2x1 vector and creates a N2xN1 matrix
img=img'; %creates a N1xN2 matrix by transposing the image.
figure(3);
imshow(img);
title('Mean Image','fontsize',18)
% Change image for manipulation
dbx=[]; % A matrix](https://image.slidesharecdn.com/ccd30660-5031-44f9-a236-c4de61b893b7-150308124157-conversion-gate01/75/MAJOR-PROJECT-40-2048.jpg)
![- 41 -
for i=1:M
temp=double(S(:,i));
dbx=[dbx temp];
end
%Covariance matrix C=A'A, L=AA'
A=dbx';
L=A*A';
% vv are the eigenvector for L
% dd are the eigenvalue for both L=dbx'*dbx and C=dbx*dbx';
[vv dd]=eig(L);
% Sort and eliminate those whose eigenvalue is zero
v=[];
d=[];
for i=1:size(vv,2)
if(dd(i,i)>1e-4)
v=[v vv(:,i)];
d=[d dd(i,i)];
end
end
%sort, will return an ascending sequence
[B index]=sort(d);
ind=zeros(size(index));
dtemp=zeros(size(index));
vtemp=zeros(size(v));
len=length(index);
for i=1:len
dtemp(i)=B(len+1-i);
ind(i)=len+1-index(i);
vtemp(:,ind(i))=v(:,i);
end
d=dtemp;
v=vtemp;
%Normalization of eigenvectors
for i=1:size(v,2) %access each column
kk=v(:,i);
temp=sqrt(sum(kk.^2));
v(:,i)=v(:,i)./temp;
end
%Eigenvectors of C matrix
u=[];
for i=1:size(v,2)
temp=sqrt(d(i));
u=[u (dbx*v(:,i))./temp];
end](https://image.slidesharecdn.com/ccd30660-5031-44f9-a236-c4de61b893b7-150308124157-conversion-gate01/75/MAJOR-PROJECT-41-2048.jpg)
![- 42 -
%Normalization of eigenvectors
for i=1:size(u,2)
kk=u(:,i);
temp=sqrt(sum(kk.^2));
u(:,i)=u(:,i)./temp;
end
% show eigenfaces;
figure(4);
for i=1:size(u,2)
img=reshape(u(:,i),icol,irow);
img=img';
img=histeq(img,255);
subplot(ceil(sqrt(M)),ceil(sqrt(M)),i)
imshow(img)
drawnow;
if i==3
title('Eigenfaces','fontsize',18)
end
end
% Find the weight of each face in the training set.
omega = [];
for h=1:size(dbx,2)
WW=[];
for i=1:size(u,2)
t = u(:,i)';
WeightOfImage = dot(t,dbx(:,h)');
WW = [WW; WeightOfImage];
end
omega = [omega WW];
end
% Acquire new image
% Note: the input image must have a bmp or jpg extension.
% It should have the same size as the ones in your training set.
% It should be placed on your desktop
InputImage = input('Please enter the name of the image and its extension n','s');
InputImage = imread(strcat('E:',InputImage));
figure(5)
subplot(1,2,1)
imshow(InputImage); colormap('gray');title('Input image','fontsize',18)
input_img=rgb2gray(InputImage);
%imshow(input_img);
InImage=reshape(double(input_img)',irow*icol,1);
temp=InImage;
me=mean(temp);](https://image.slidesharecdn.com/ccd30660-5031-44f9-a236-c4de61b893b7-150308124157-conversion-gate01/75/MAJOR-PROJECT-42-2048.jpg)
![- 43 -
st=std(temp);
temp=(temp-me)*ustd/st+um;
NormImage = temp;
Difference = temp-m;
p = [];
aa=size(u,2);
for i = 1:aa
pare = dot(NormImage,u(:,i));
p = [p; pare];
end
ReshapedImage = m + u(:,1:aa)*p; %m is the mean image, u is the eigenvector
ReshapedImage = reshape(ReshapedImage,icol,irow);
ReshapedImage = ReshapedImage';
%show the reconstructed image.
subplot(1,2,2)
imagesc(ReshapedImage); colormap('gray');
title('Reconstructed image','fontsize',18)
InImWeight = [];
for i=1:size(u,2)
t = u(:,i)';
WeightOfInputImage = dot(t,Difference');
InImWeight = [InImWeight; WeightOfInputImage];
end
ll = 1:M;
figure(68)
subplot(1,2,1)
stem(ll,InImWeight)
title('Weight of Input Face','fontsize',14)
% Find Euclidean distance
e=[];
for i=1:size(omega,2)
q = omega(:,i);
DiffWeight = InImWeight-q;
mag = norm(DiffWeight);
e = [e mag];
end
kk = 1:size(e,2);
subplot(1,2,2)
stem(kk,e)
title('Eucledian distance of input image','fontsize',14)
MaximumValue=max(e)
MinimumValue=min(e)
Min_id=find(e==min(e));](https://image.slidesharecdn.com/ccd30660-5031-44f9-a236-c4de61b893b7-150308124157-conversion-gate01/75/MAJOR-PROJECT-43-2048.jpg)
![- 44 -
person_no=Min_id/times;
p1=(round(person_no));
if(person_no<p1)
p1=(p1-1);
display('Detected face number')
display(p1)
write_digit(14,15,16,17,p1);
end
if(person_no>p1)
p1=(p1+1);
display('Detected face number')
display(p1)
write_digit(14,15,16,17,p1);
end
if(person_no==p1)
display('Detected face number')
display(p1)
write_digit(14,15,16,17,p1);
end
end
%% recognize_face_cam.m– function for matching face using Eigenface
algorithm from camera
% Thanks to Santiago Serrano
function Min_id = recognize_face_cam(M)
imaqreset;
close all
clc
% number of images on your training set.
vid = videoinput('winvideo',1,'YUY2_320x240');
%Chosen std and mean.
%It can be any number that it is close to the std and mean of most of the images.
um=100;
ustd=80;
person_no=0;
times=5;
%read and show images(bmp);
S=[]; %img matrix
figure(1);
for i=1:M
str=strcat(int2str(i),'.jpg'); %concatenates two strings that form the name of the image
eval('img=imread(str);');
%eval('img=rgb2gray(image);');](https://image.slidesharecdn.com/ccd30660-5031-44f9-a236-c4de61b893b7-150308124157-conversion-gate01/75/MAJOR-PROJECT-44-2048.jpg)
![- 45 -
subplot(ceil(sqrt(M)),ceil(sqrt(M)),i)
imshow(img)
if i==3
title('Training set','fontsize',18)
end
drawnow;
[irow icol]=size(img); % get the number of rows (N1) and columns (N2)
temp=reshape(img',irow*icol,1); %creates a (N1*N2)x1 matrix
S=[S temp]; %X is a N1*N2xM matrix after finishing the sequence
%this is our S
end
%Here we change the mean and std of all images. We normalize all images.
%This is done to reduce the error due to lighting conditions.
for i=1:size(S,2)
temp=double(S(:,i));
m=mean(temp);
st=std(temp);
S(:,i)=(temp-m)*ustd/st+um;
end
%show normalized images
figure(2);
for i=1:M
str=strcat(int2str(i),'.jpg');
img=reshape(S(:,i),icol,irow);
img=img';
eval('imwrite(img,str)');
subplot(ceil(sqrt(M)),ceil(sqrt(M)),i)
imshow(img)
drawnow;
if i==3
title('Normalized Training Set','fontsize',18)
end
end
%mean image;
m=mean(S,2); %obtains the mean of each row instead of each column
tmimg=uint8(m); %converts to unsigned 8-bit integer. Values range from 0 to 255
img=reshape(tmimg,icol,irow); %takes the N1*N2x1 vector and creates a N2xN1 matrix
img=img'; %creates a N1xN2 matrix by transposing the image.
figure(3);
imshow(img);
title('Mean Image','fontsize',18)
% Change image for manipulation
dbx=[]; % A matrix
for i=1:M](https://image.slidesharecdn.com/ccd30660-5031-44f9-a236-c4de61b893b7-150308124157-conversion-gate01/75/MAJOR-PROJECT-45-2048.jpg)
![- 46 -
temp=double(S(:,i));
dbx=[dbx temp];
end
%Covariance matrix C=A'A, L=AA'
A=dbx';
L=A*A';
% vv are the eigenvector for L
% dd are the eigenvalue for both L=dbx'*dbx and C=dbx*dbx';
[vv dd]=eig(L);
% Sort and eliminate those whose eigenvalue is zero
v=[];
d=[];
for i=1:size(vv,2)
if(dd(i,i)>1e-4)
v=[v vv(:,i)];
d=[d dd(i,i)];
end
end
%sort, will return an ascending sequence
[B index]=sort(d);
ind=zeros(size(index));
dtemp=zeros(size(index));
vtemp=zeros(size(v));
len=length(index);
for i=1:len
dtemp(i)=B(len+1-i);
ind(i)=len+1-index(i);
vtemp(:,ind(i))=v(:,i);
end
d=dtemp;
v=vtemp;
%Normalization of eigenvectors
for i=1:size(v,2) %access each column
kk=v(:,i);
temp=sqrt(sum(kk.^2));
v(:,i)=v(:,i)./temp;
end
%Eigenvectors of C matrix
u=[];
for i=1:size(v,2)
temp=sqrt(d(i));
u=[u (dbx*v(:,i))./temp];
end
%Normalization of eigenvectors](https://image.slidesharecdn.com/ccd30660-5031-44f9-a236-c4de61b893b7-150308124157-conversion-gate01/75/MAJOR-PROJECT-46-2048.jpg)
![- 47 -
for i=1:size(u,2)
kk=u(:,i);
temp=sqrt(sum(kk.^2));
u(:,i)=u(:,i)./temp;
end
% show eigenfaces;
figure(4);
for i=1:size(u,2)
img=reshape(u(:,i),icol,irow);
img=img';
img=histeq(img,255);
subplot(ceil(sqrt(M)),ceil(sqrt(M)),i)
imshow(img)
drawnow;
if i==3
title('Eigenfaces','fontsize',18)
end
end
% Find the weight of each face in the training set.
omega = [];
for h=1:size(dbx,2)
WW=[];
for i=1:size(u,2)
t = u(:,i)';
WeightOfImage = dot(t,dbx(:,h)');
WW = [WW; WeightOfImage];
end
omega = [omega WW];
end
% Acquire new image from camera
preview(vid);
choice=menu('Push CAM button for taking pic',...
'CAM');
if(choice==1)
g=getsnapshot(vid);
end
rgbImage=ycbcr2rgb(g);
imwrite(rgbImage,'camshot.jpg');
closepreview(vid);
InputImage = imread('camshot.jpg');
figure(5)
subplot(1,2,1)
imshow(InputImage); colormap('gray');title('Input image','fontsize',18)
input_img=rgb2gray(InputImage);](https://image.slidesharecdn.com/ccd30660-5031-44f9-a236-c4de61b893b7-150308124157-conversion-gate01/75/MAJOR-PROJECT-47-2048.jpg)
![- 48 -
%imshow(input_img);
InImage=reshape(double(input_img)',irow*icol,1);
temp=InImage;
me=mean(temp);
st=std(temp);
temp=(temp-me)*ustd/st+um;
NormImage = temp;
Difference = temp-m;
p = [];
aa=size(u,2);
for i = 1:aa
pare = dot(NormImage,u(:,i));
p = [p; pare];
end
ReshapedImage = m + u(:,1:aa)*p; %m is the mean image, u is the eigenvector
ReshapedImage = reshape(ReshapedImage,icol,irow);
ReshapedImage = ReshapedImage';
%show the reconstructed image.
subplot(1,2,2)
imagesc(ReshapedImage); colormap('gray');
title('Reconstructed image','fontsize',18)
InImWeight = [];
for i=1:size(u,2)
t = u(:,i)';
WeightOfInputImage = dot(t,Difference');
InImWeight = [InImWeight; WeightOfInputImage];
end
ll = 1:M;
figure(68)
subplot(1,2,1)
stem(ll,InImWeight)
title('Weight of Input Face','fontsize',14)
% Find Euclidean distance
e=[];
for i=1:size(omega,2)
q = omega(:,i);
DiffWeight = InImWeight-q;
mag = norm(DiffWeight);
e = [e mag];
end
kk = 1:size(e,2);
subplot(1,2,2)
stem(kk,e)
title('Eucledian distance of input image','fontsize',14)](https://image.slidesharecdn.com/ccd30660-5031-44f9-a236-c4de61b893b7-150308124157-conversion-gate01/75/MAJOR-PROJECT-48-2048.jpg)
![- 50 -
FDetect = vision.CascadeObjectDetector; %To detect Face
I = getsnapshot(vid); %Read the input image
BB = step(FDetect,I); %Returns Bounding Box values based on number of objects
hold on
figure(1),imshow(I);
title('Face Detection');
for i = 1:size(BB,1)
no_face=size(BB,1);
write_digit(14,15,16,17,no_face);
rectangle('Position',BB(i,:),'LineWidth',2,'LineStyle','-','EdgeColor','y');
display(BB(1));
display(BB(2));
motor_motion(BB(1),BB(2));
hold off;
flushdata(vid);
end
end
stop(vid);
end
%% vj_faceD_live.m– function for tracking recognizedface
function vj_faceD_live(std,mean)
imaqreset;
close all
clc
detect=0;
std_2=0;
mean_2=0;
tlrnce=7;
while (1==1)
choice=menu('Face Recognition',...
'Real time recognition',...
'Track last recognised face',...
'Exit');
if (choice==1)
[std,mean]= face_stdmean();
%Detect objects using Viola-Jones Algorithm
vid = videoinput('winvideo',1,'YUY2_320x240');
set(vid,'ReturnedColorSpace','rgb');
set(vid,'TriggerRepeat',Inf);
vid.FrameGrabInterval = 1;
vid.FramesPerTrigger=20;](https://image.slidesharecdn.com/ccd30660-5031-44f9-a236-c4de61b893b7-150308124157-conversion-gate01/75/MAJOR-PROJECT-50-2048.jpg)

![- 52 -
stop(vid);
end
if(choice==2)
[std,mean]= face_stdmean_recgnz();
%Detect objects using Viola-Jones Algorithm
vid = videoinput('winvideo',1,'YUY2_320x240');
set(vid,'ReturnedColorSpace','rgb');
set(vid,'TriggerRepeat',Inf);
vid.FrameGrabInterval = 1;
vid.FramesPerTrigger=20;
figure; % Ensure smooth display
set(gcf,'doublebuffer','on');
start(vid);
while(vid.FramesAcquired<=600);
FDetect = vision.CascadeObjectDetector; %To detect Face
I = getsnapshot(vid); %Read the input image
BB = step(FDetect,I); %Returns Bounding Box values based on number of objects
hold on
if(size(BB,1) == 1)
I2=imcrop(I,BB);
gray_face=rgb2gray(I2);
std_2 = std2(gray_face);
mean_2 = mean2(gray_face);
%figure(1),imshow(gray_face);
end
figure(1),imshow(I);
title('Face Recognition');
display(std);
display(mean);
display(std_2);
display(mean_2);
for i = 1:size(BB,1)
if((((std_2<=(std+tlrnce))&&(std_2>=(std-
tlrnce))))&&((mean_2<=(mean+tlrnce))&&(mean_2>=(mean-tlrnce))))
rectangle('Position',BB(i,:),'LineWidth',4,'LineStyle','-','EdgeColor','g');
display('DETECTED');
detect=(detect+1)
if(detect==2)
display('tracking....');
detect=0;
motor_motion(BB(1),BB(2));%for motion of motors in direction of faces](https://image.slidesharecdn.com/ccd30660-5031-44f9-a236-c4de61b893b7-150308124157-conversion-gate01/75/MAJOR-PROJECT-52-2048.jpg)
![- 53 -
end
else
rectangle('Position',BB(i,:),'LineWidth',4,'LineStyle','-','EdgeColor','r');
display('NOT DETECTED');
end
hold off;
flushdata(vid);
end
end
stop(vid);
end
if(choice==3)
return
end
end
%% face_stdmean.m – function returns standard deviation and mean for real
time recognition
function [std_f,mean_f] = face_stdmean()
imaqreset;
close all;
clc;
i=1;
global std
global mean
global times
std=0;mean=0;
vid = videoinput('winvideo',1,'YUY2_320x240');
while (1==1)
choice=menu('Face Recognition',...
'Taking photos for recognition',...
'Exit');
if (choice==1)
FDetect = vision.CascadeObjectDetector;
preview(vid);
while(i<(times+1))
choice2=menu('Face Recognition',...
'Capture');
if(choice2==1)
g=getsnapshot(vid);
%saving rgb image in specified folder
rgbImage=ycbcr2rgb(g);
str=strcat(int2str(i),'f.jpg');
fullImageFileName = fullfile('E:New Folder',str);
imwrite(rgbImage,fullImageFileName);](https://image.slidesharecdn.com/ccd30660-5031-44f9-a236-c4de61b893b7-150308124157-conversion-gate01/75/MAJOR-PROJECT-53-2048.jpg)
![- 54 -
BB = step(FDetect,rgbImage);
I2=imcrop(rgbImage,BB);
%saving grayscale image in current directory
grayImage=rgb2gray(I2);
Dir_name=fullfile(pwd,str);
imwrite(grayImage,Dir_name);
std = (std+std2(grayImage));
mean =(mean+mean2(grayImage));
i=(i+1);
end
std_f=(std/times)
mean_f=(mean/times)
end
end
closepreview(vid);
if (choice==2)
std_f=(std/times)
mean_f=(mean/times)
return;
end
end
end
%% face_stdmean_recgnz.m– function returns standard deviation and mean
of last recognizedface
function [std_f,mean_f] = face_stdmean_recgnz()
close all;
clc;
global face_id
global std
global mean
global times
std=0;mean=0;
%i=face_id;
i=input('Enter face id for live recognition: ');
FDetect = vision.CascadeObjectDetector;
j=(i*times);
k=(j-times);
while(j>=(k+1))
str=strcat(int2str(j),'.jpg');
fullImageFileName = fullfile('E:New Folder',str);
I=imread(fullImageFileName);
BB = step(FDetect,I);
I2=imcrop(I,BB);
grayImage=rgb2gray(I2);
str2=strcat(int2str(j),'f.jpg');](https://image.slidesharecdn.com/ccd30660-5031-44f9-a236-c4de61b893b7-150308124157-conversion-gate01/75/MAJOR-PROJECT-54-2048.jpg)
![- 62 -
REFERENCES
The usefull topics for my project are taken from these references :
[1] Santiago Serrano, Eigen Faces tutorial, Drexel University
[2] Padhraic Smyth, Face Detection using the Viola-Jones Method, Department Computer
Science University of California, Irvine.
[3] Abboud, F. Davoine, and M. Dang. Facial expression recognition
and synthesis based on an appearance model. Signal Process., Image Commun., 2004.
[2] J. Ahlberg. Candide-3 – an updated parametrised face. Technical report,
Link¨oping University, 2001.
[4] J. Ahlberg and R. Forchheimer. Face tracking for model-based coding
and face animation. International journal of imaging systems and technology, 2003.
[5] A. Azerbayejani and A. Pentland. Recursive estimation of motion, structure, and focal
length. IEEE PAMI, 1995.
[6] V. Belle, T. Deselaers, and S. Schiffer. Randomized trees for real-time
one-step face detection and recognition. 2008.
[7] M. J. Black and Y. Yacoob. Recognizing facial expressions in image
sequences using local parameterized models of image motion. IJCV, 1997.
[8] S. Basu, I. Essa, and A. Pentland. Motion regularization for model-based
head tracking. In CVPR 1996, 1996.
[9] M. L. Cascia, S. Scarloff, and V. Athitsos. Fast, reliable head tracking
under varying illumination: An approach based on registration of texturemapped
3d models. IEEE PAMI, 2000.](https://image.slidesharecdn.com/ccd30660-5031-44f9-a236-c4de61b893b7-150308124157-conversion-gate01/75/MAJOR-PROJECT-62-2048.jpg)

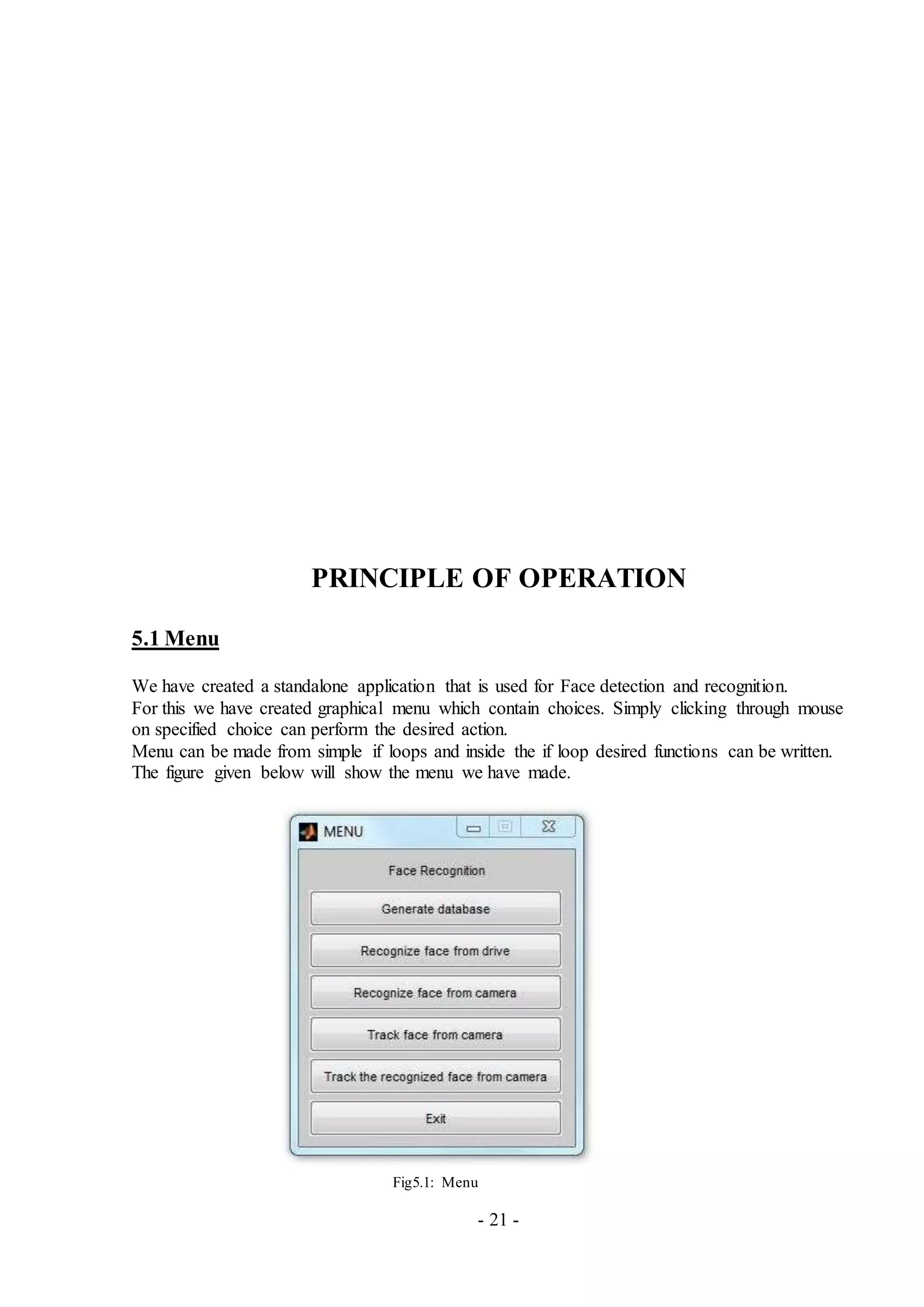
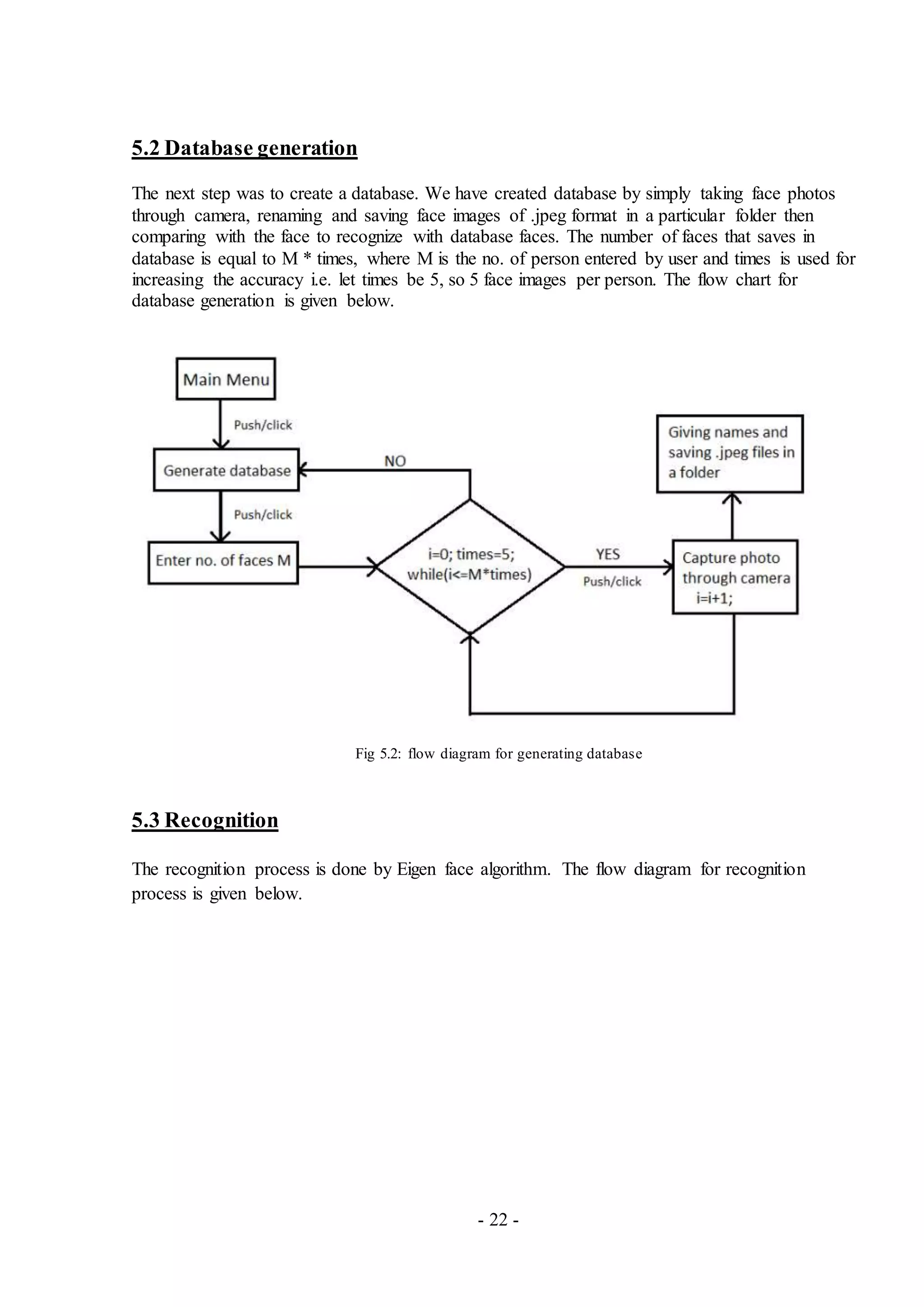
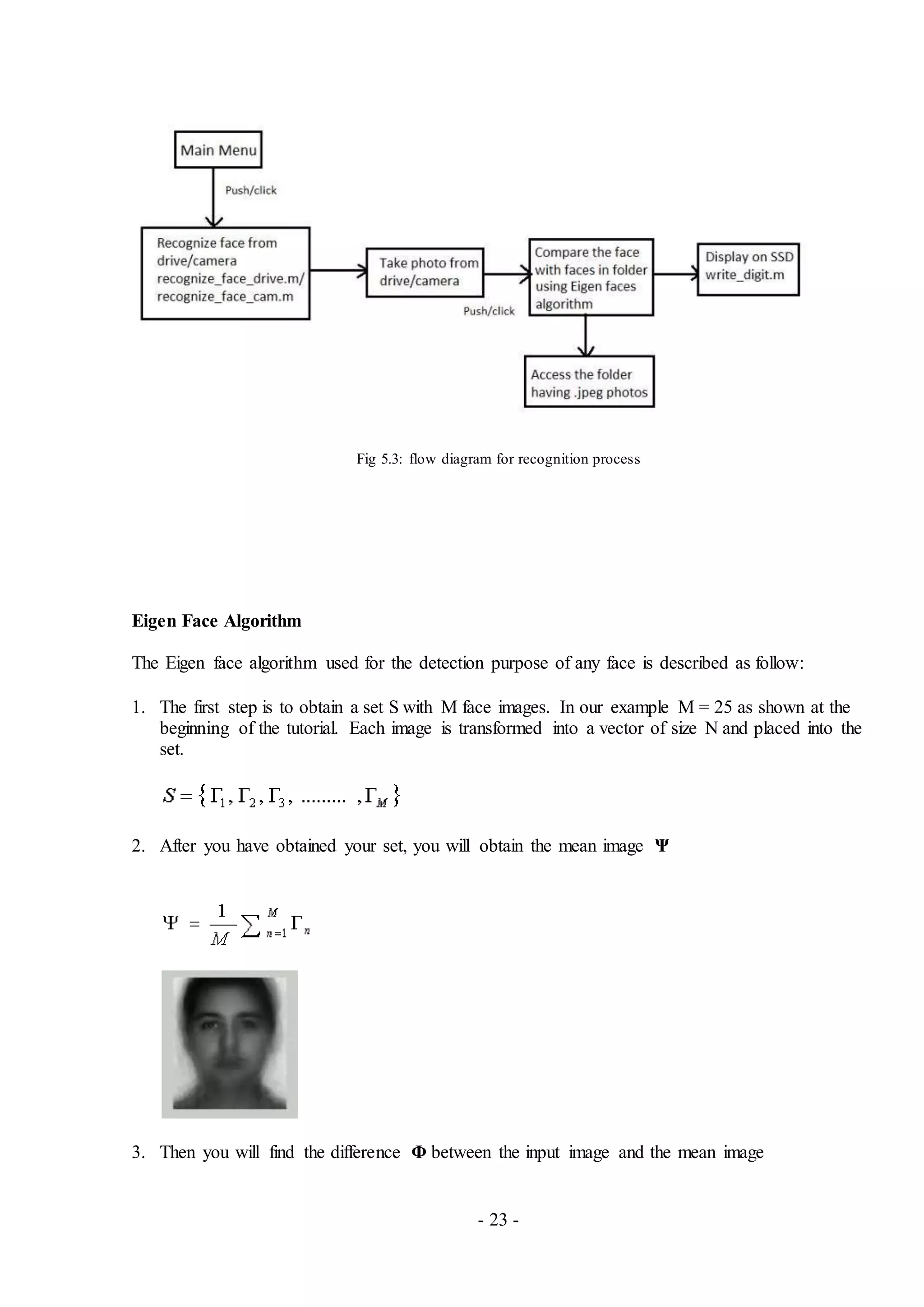
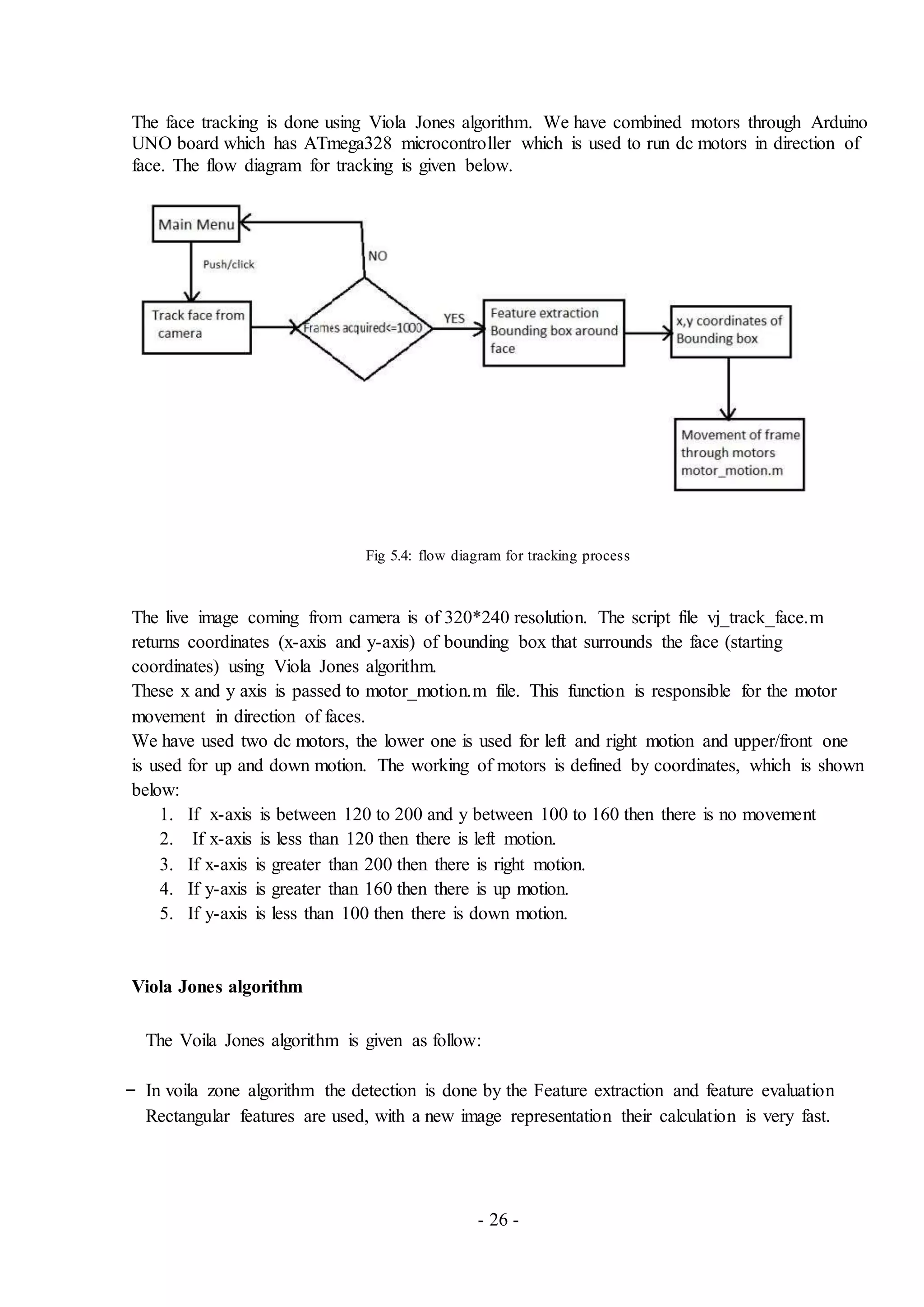
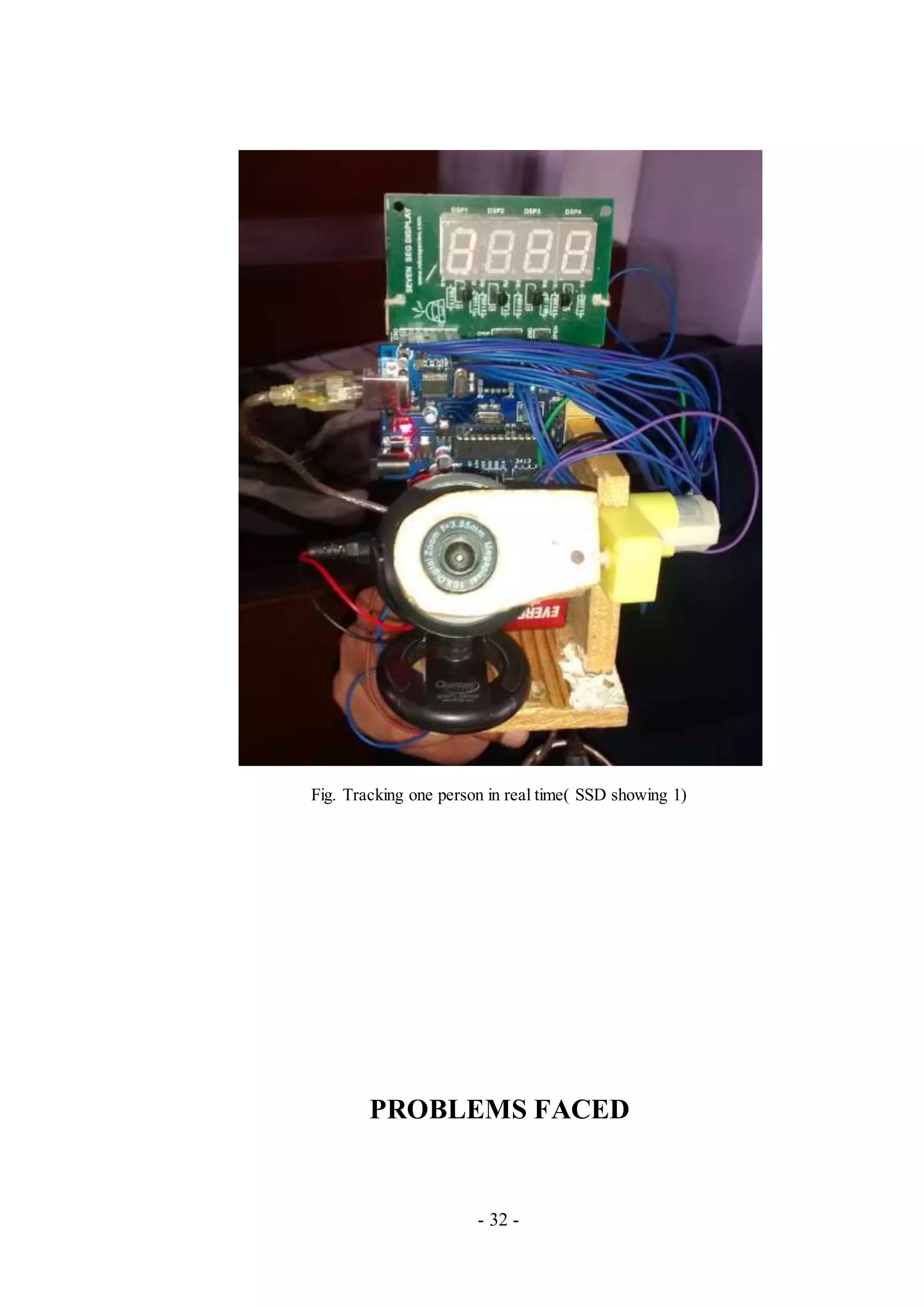
This document is a project report on a face recognition and tracking system. It includes an acknowledgements section thanking those who helped with the project. It also includes an abstract describing the project as building a system for face recognition and tracking using image processing and computer vision toolboxes in MATLAB. The document outlines the various chapters that will be included, such as introductions to image processing and the hardware and software used, including Arduino and MATLAB. It provides block diagrams of the overall system design and hardware.