Downloaded 24 times
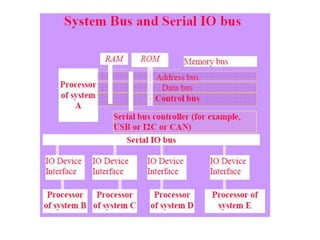
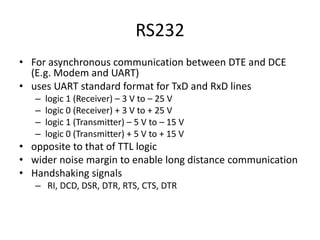
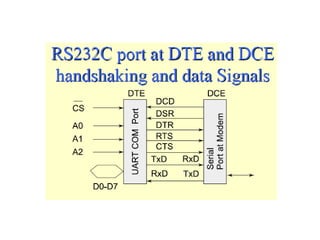
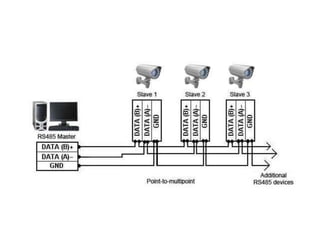
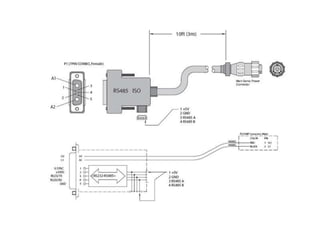
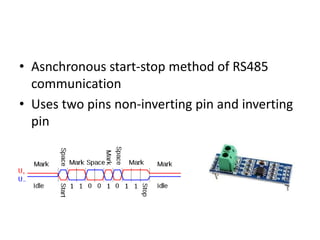
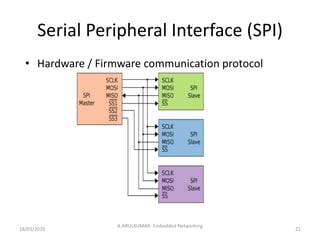
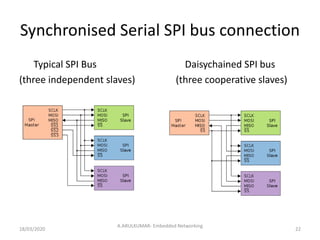
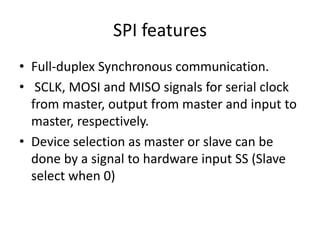
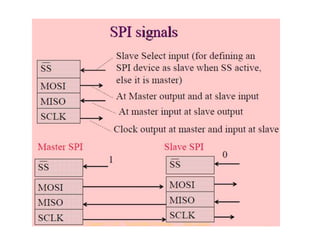
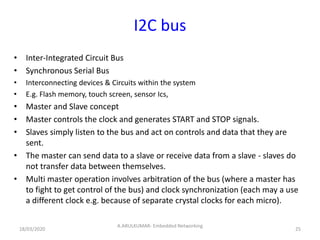
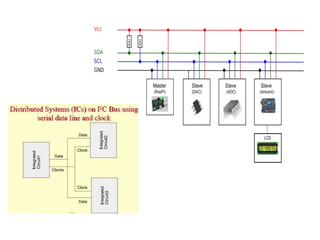
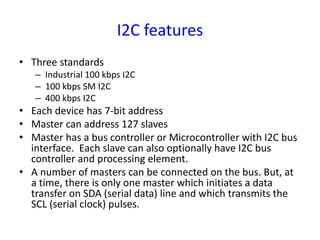
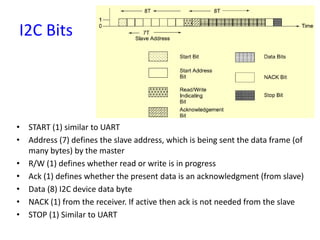
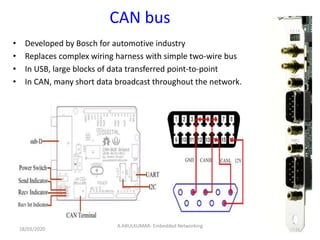
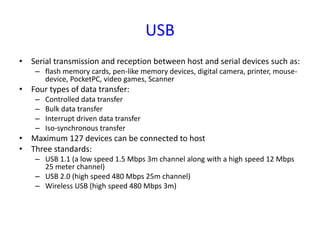
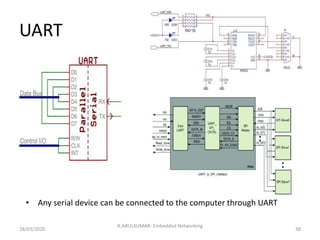
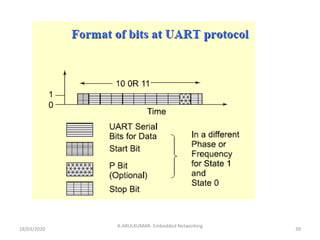
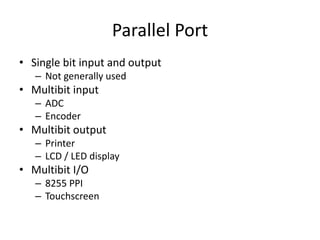
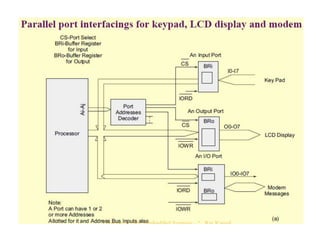

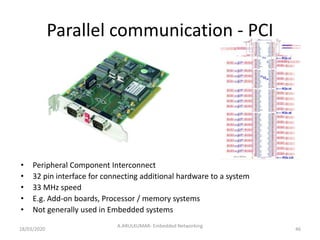
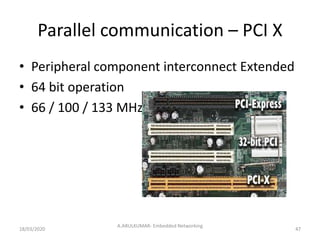
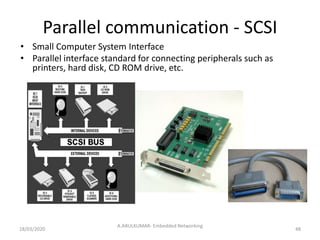

This document discusses various communication buses and protocols used for embedded networking. It describes serial communication protocols like RS-232, RS-485, CAN, I2C, SPI and parallel communication interfaces like parallel port, PCI, and SCSI. It provides details on the specifications, features, and applications of each protocol.