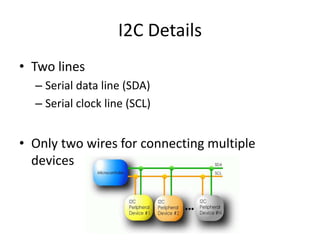
I2C is a 2-wire serial communication protocol used to connect sensors and peripherals to microcontrollers. It uses just two bidirectional open-drain lines - serial data line (SDA) and serial clock line (SCL). Each device connected to the I2C bus has a unique address and can operate as a transmitter or receiver. The microcontroller acts as the master of the bus by generating the clock signal and initiating data transfers with slave devices by addressing them. Common applications include reading sensor data from an accelerometer over I2C.



















































![Communication_Protocols[2][1].pptx on protocoals](https://cdn.slidesharecdn.com/ss_thumbnails/communicationprotocols21-250429164707-38355411-thumbnail.jpg?width=640&height=640&fit=bounds)