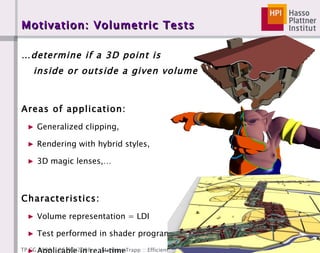
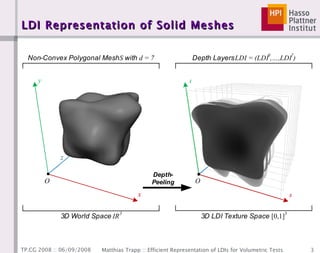
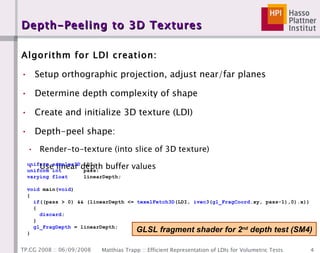
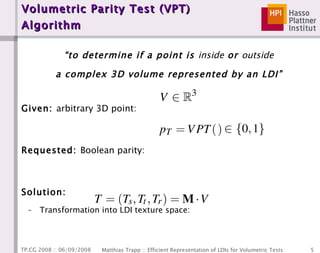
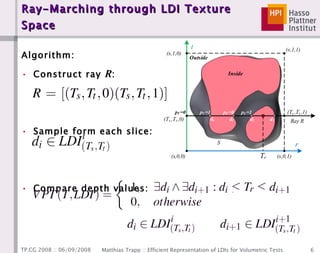
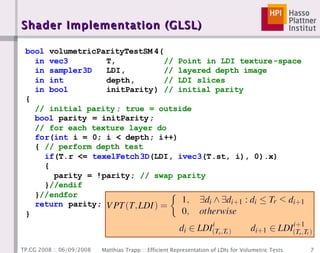
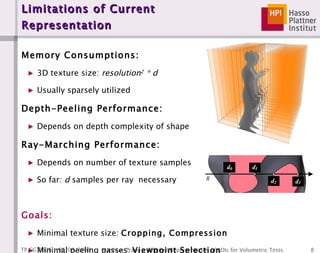
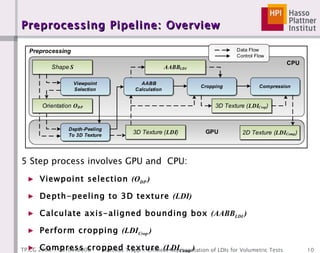
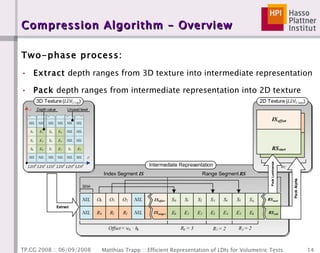
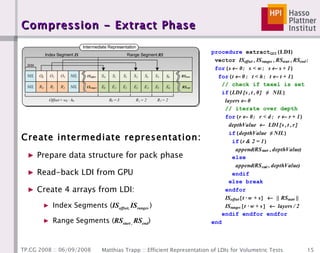
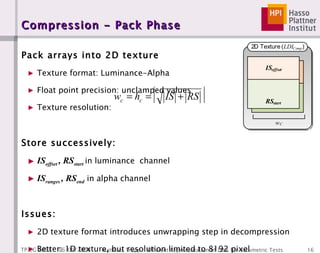
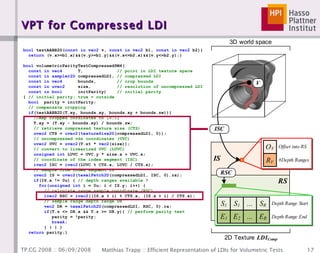
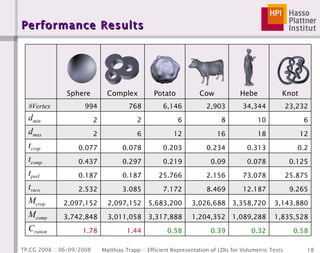
The document proposes a method for efficiently representing layered depth images (LDIs) to enable real-time volumetric tests on 3D meshes. The method involves creating an LDI of the mesh using depth peeling, calculating its bounding box, cropping the LDI, and compressing it in a lossless two-phase process. A volumetric parity test is developed that can determine if a point is inside or outside the volume by ray marching through the compressed LDI texture. Performance results show the compression achieves ratios of 1:2-3 with little overhead and enables real-time volumetric queries.
![Compressing Depth Ranges Depth Ranges: Group depth values: d i = 0,…,d-1 DR j = (S j ,E j ), j = 0,…,d/2 Interval [S j , E j ], S j = d 2j , E j = d 2j+1 denotes inside of volume Lossless Compression Idea: Sequential align all depth ranges of a Ray R Fetch start ( S j ) and end ( S j ) with single instruction DR 0 DR 1](https://image.slidesharecdn.com/efficientldirepresentations-101007154313-phpapp02/85/Efficient-LDI-Representation-TPCG-2008-13-320.jpg)
![Questions ? Contact: Matthias Trapp [email_address] Computer Graphics Systems Group Prof. Dr. Jürgen Döllner www.hpi.uni-potsdam.de/3d Researchgroup 3D-Geoinformation www.3dgi.de](https://image.slidesharecdn.com/efficientldirepresentations-101007154313-phpapp02/85/Efficient-LDI-Representation-TPCG-2008-21-320.jpg)