
Recommended
Recommended
More Related Content
Similar to Non-Photorealistic Rendering of 3D Point Clouds for Cartographic Visualization
Similar to Non-Photorealistic Rendering of 3D Point Clouds for Cartographic Visualization (20)
More from Matthias Trapp
More from Matthias Trapp (20)
Recently uploaded
Recently uploaded (20)
Non-Photorealistic Rendering of 3D Point Clouds for Cartographic Visualization
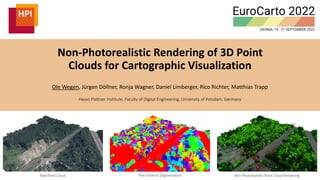
- 1. Non-Photorealistic Rendering of 3D Point Clouds for Cartographic Visualization Ole Wegen, Jürgen Döllner, Ronja Wagner, Daniel Limberger, Rico Richter, Matthias Trapp Hasso Plattner Institute, Faculty of Digital Engineering, University of Potsdam, Germany Raw Point Cloud Tree Instance Segmentation Non-Photorealistic Point Cloud Rendering
- 2. Introduction – Point Clouds • Point clouds are a common representation of 3D real-world data • Acquired using specific laser scanning hardware or photogrammetry approaches • Observation: increasing acquisition efficiency, detail, and analysis efficiency • Application domains: city planning, infrastructure/environmental monitoring, facility management 09/06/2023 NPR of 3D Point Clouds for Cartographic Visualization 2 Point cloud from aerial LiDAR, provided by “Landesvermessung und Geobasisinformation Brandenburg”, approx. 10-20 points per m2.
- 3. Introduction – Point Cloud Rendering • Point clouds as data source for applications that uses real-world geometric and geographic data • Direct, interactive visualization/exploration of raw point cloud data possible but of limited usefulness for cartography-related tasks • What techniques can we employ to overcome the challenges of point cloud data for cartography-related tasks? 09/06/2023 NPR of 3D Point Clouds for Cartographic Visualization 3 Plan of Paris with numerous vignettes depicting significant buildings and Metro lines. Published by F. Dutal, 1920[1].
- 4. Challenges Regarding Raw Point Clouds 1. Acquisition-related problems: point sparsity, dull colors, noise 2. Missing depth cues complicate the distinction between different objects 3. Increased cognitive/perceptual effort for information retrieval/scene understanding due to missing abstraction leads to 4. Missing semantic information complicates detail+overview/focus+context approaches 09/06/2023 NPR of 3D Point Clouds for Cartographic Visualization 4 Point cloud from aerial LiDAR, obtained from OpenGeodata.NRW[2], approx. 75 points per m2.
- 5. Contributions Objective: Motivate and highlight the direct use of 3D point clouds for cartographic purposes Contributions: 1. Demonstrate application of point clouds for cartography, without computation of intermediate representations 2. General approach for point cloud visualization in the cartographic context, combining • Analysis techniques for massive point clouds • Various non-photorealistic rendering technique for stylized depiction of point clouds • Interactive parameter control of exploration and rendering techniques 3. Applications: • Interactive exploration of real-world scenes, • Facilitate perception/recognition of specific semantic classes 09/06/2023 NPR of 3D Point Clouds for Cartographic Visualization 5
- 6. Overview Visualization Pipeline 09/06/2023 NPR of 3D Point Clouds for Cartographic Visualization 6 Interactive, user-driven visualization of point clouds for cartographic purposes
- 7. Example Pipeline – Results 09/06/2023 NPR of 3D Point Clouds for Cartographic Visualization 7 Original Point Cloud Final Abstraction Result
- 8. Overview Visualization Pipeline 09/06/2023 NPR of 3D Point Clouds for Cartographic Visualization 8 Interactive, user-driven visualization of point clouds for cartographic purposes Preprocessing
- 9. Point Cloud Analysis & Preprocessing Prepare point cloud in an initial (potentially time consuming) step: 1. Enrich point cloud with shading and segment information 2. Split point cloud into multiple point clouds for separate parameterization 09/06/2023 NPR of 3D Point Clouds for Cartographic Visualization 9
- 10. Example Pipeline – Analysis & Preprocessing 09/06/2023 NPR of 3D Point Clouds for Cartographic Visualization 10
- 11. Analysis & Preprocessing – Segmentation (I) 09/06/2023 NPR of 3D Point Clouds for Cartographic Visualization 11 Results of semantic segmentation using an algorithmic approach. Albedo Data Infrared Data Surface Orientation Data
- 12. Analysis & Preprocessing – Segmentation (II) 09/06/2023 NPR of 3D Point Clouds for Cartographic Visualization 12 Semantic segmentation of mobile mapping data using machine learning (PointNet++[3] and EdgeConv[4])
- 13. Analysis & Preprocessing – Ambient Occlusion 09/06/2023 NPR of 3D Point Clouds for Cartographic Visualization 13 Input point cloud with colors obtained by aerial images. Depiction of ambient occlusion term only.
- 14. Analysis & Preprocessing – Ambient Occlusion 09/06/2023 NPR of 3D Point Clouds for Cartographic Visualization 14
- 15. Overview Visualization Pipeline 09/06/2023 NPR of 3D Point Clouds for Cartographic Visualization 15 Interactive, user-driven visualization of point clouds for cartographic purposes Rendering
- 16. Interactive Point Cloud Rendering • Rendering result of each point cloud is controlled by a set of rendering parameters • A configuration of parameter values is stored in the form of a stylization descriptor • High-level control: user selects and assigns stylization descriptors • Fine-grained control: user manipulates individual parameters 09/06/2023 NPR of 3D Point Clouds for Cartographic Visualization 16
- 17. Example – Rendering 09/06/2023 NPR of 3D Point Clouds for Cartographic Visualization 17
- 18. Overview Visualization Pipeline 09/06/2023 NPR of 3D Point Clouds for Cartographic Visualization 18 Interactive, user-driven visualization of point clouds for cartographic purposes Postprocessing
- 19. Postprocessing • Combine different rendering results • Visual enhancement using image processing • Outlining for improved object perception and as depth cues 09/06/2023 NPR of 3D Point Clouds for Cartographic Visualization 19
- 20. Example – Postprocessing 09/06/2023 NPR of 3D Point Clouds for Cartographic Visualization 20
- 21. Visualization Pipeline 09/06/2023 NPR of 3D Point Clouds for Cartographic Visualization 21
- 22. Application Examples (I) 09/06/2023 NPR of 3D Point Clouds for Cartographic Visualization 22
- 23. Application Examples (II) 09/06/2023 NPR of 3D Point Clouds for Cartographic Visualization 23 Change visualization in an urban area
- 24. Application Examples (III) 09/06/2023 NPR of 3D Point Clouds for Cartographic Visualization 24 Focus+Context: Highlight instances of specific semantic class (e.g., pedestrians)
- 25. Conclusions • Point clouds have the potential to serve as basis for generation of cartographic visualizations • Segmentation is an important preprocessing step for the application of rendering techniques • NPR can be used to provide abstraction, enhance perception, and reduce the cognitive effort • Low and high-level stylization parameters enable fast configuration of NPR techniques • 3D visualization is not always the best choice for cartographic applications, but where it is, point clouds are a useful geometry representation when combined with analysis and NPR techniques 09/06/2023 NPR of 3D Point Clouds for Cartographic Visualization 25
- 26. References • [1] Paris Monumental et Metropolitain, https://commons.wikimedia.org/wiki/File:1920_Art_Nouveau_Monument_Map_of_Paris,_France_- _Geographicus_-_ParisMonumental-dutal-1920.jpg • [2] OpenGeoData.NRW, www.opengeodata.nrw.de • [3] Charles Ruizhongtai Qi, Hao Su, Kaichun Mo, Leonidas J. Guibas. PointNet++: Deep Hierarchical Feature Learning on Point Sets in a Metric Space. NIPS 2017. • [4] Yue Wang, Yongbin Sun, Ziwei Liu, Sanjay E. Sarma, Michael M. Bronstein, Justin M. Solomon. Dynamic Graph CNN for Learning on Point Clouds. 2019. ACM Trans. Graph. 38(5). 09/06/2023 NPR of 3D Point Clouds for Cartographic Visualization 26 View publication stats