Downloaded 50 times




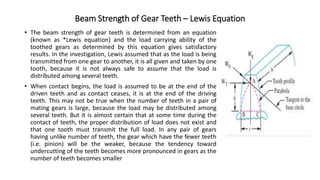









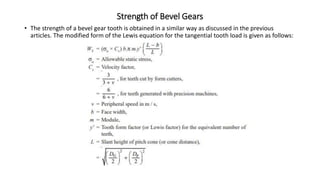
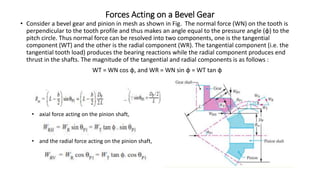





1. The document provides an introduction to different types of gears including spur gears, helical gears, and bevel gears. It discusses key terms used in gears such as pitch circle, pressure angle, addendum, and defines formulas for calculating values like circular pitch and diametral pitch. 2. Design considerations for gear drives are outlined, including power transmitted, speeds, velocity ratio and center distance. Strength calculations using the Lewis equation and factors for dynamic loading and wear are also covered. 3. The summary provides an overview of the main topics and concepts discussed in the gear document.



































































