Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
Submit search
EN
Uploaded by
Deep Learning JP
PPTX, PDF
803 views
[DL輪読会]Real-Time Semantic Stereo Matching
2019/12/13 Deep Learning JP: http://deeplearning.jp/seminar-2/
Technology
◦
Related topics:
Deep Learning
•
Read more
2
Save
Share
Embed
Embed presentation
Download
Download to read offline
1
/ 14
2
/ 14
3
/ 14
4
/ 14
5
/ 14
6
/ 14
7
/ 14
8
/ 14
9
/ 14
10
/ 14
11
/ 14
12
/ 14
13
/ 14
14
/ 14
More Related Content
PDF
【DL輪読会】Hierarchical Text-Conditional Image Generation with CLIP Latents
by
Deep Learning JP
PDF
Transformer メタサーベイ
by
cvpaper. challenge
PDF
自己教師学習(Self-Supervised Learning)
by
cvpaper. challenge
PPTX
You Only Look One-level Featureの解説と見せかけた物体検出のよもやま話
by
Yusuke Uchida
PPTX
【DL輪読会】論文解説:Offline Reinforcement Learning as One Big Sequence Modeling Problem
by
Deep Learning JP
PDF
ゼロから始める深層強化学習(NLP2018講演資料)/ Introduction of Deep Reinforcement Learning
by
Preferred Networks
PDF
[DL輪読会]Model soups: averaging weights of multiple fine-tuned models improves ...
by
Deep Learning JP
PDF
Real-Time Semantic Stereo Matching
by
harmonylab
【DL輪読会】Hierarchical Text-Conditional Image Generation with CLIP Latents
by
Deep Learning JP
Transformer メタサーベイ
by
cvpaper. challenge
自己教師学習(Self-Supervised Learning)
by
cvpaper. challenge
You Only Look One-level Featureの解説と見せかけた物体検出のよもやま話
by
Yusuke Uchida
【DL輪読会】論文解説:Offline Reinforcement Learning as One Big Sequence Modeling Problem
by
Deep Learning JP
ゼロから始める深層強化学習(NLP2018講演資料)/ Introduction of Deep Reinforcement Learning
by
Preferred Networks
[DL輪読会]Model soups: averaging weights of multiple fine-tuned models improves ...
by
Deep Learning JP
Real-Time Semantic Stereo Matching
by
harmonylab
What's hot
PDF
【メタサーベイ】Neural Fields
by
cvpaper. challenge
PDF
20090924 姿勢推定と回転行列
by
Toru Tamaki
PPTX
モデル高速化百選
by
Yusuke Uchida
PPTX
【DL輪読会】High-Resolution Image Synthesis with Latent Diffusion Models
by
Deep Learning JP
PDF
SSII2021 [TS1] Visual SLAM ~カメラ幾何の基礎から最近の技術動向まで~
by
SSII
PPTX
【DL輪読会】DiffRF: Rendering-guided 3D Radiance Field Diffusion [N. Muller+ CVPR2...
by
Deep Learning JP
PPTX
2014 3 13(テンソル分解の基礎)
by
Tatsuya Yokota
PPTX
[DL輪読会]Vision Transformer with Deformable Attention (Deformable Attention Tra...
by
Deep Learning JP
PPTX
[DL輪読会]When Does Label Smoothing Help?
by
Deep Learning JP
PDF
[DL輪読会]AdaShare: Learning What To Share For Efficient Deep Multi-Task Learning
by
Deep Learning JP
PPTX
[解説スライド] NeRF: Representing Scenes as Neural Radiance Fields for View Synthesis
by
Kento Doi
PDF
[DL輪読会]画像を使ったSim2Realの現況
by
Deep Learning JP
PDF
SSII2022 [TS1] Transformerの最前線〜 畳込みニューラルネットワークの先へ 〜
by
SSII
PPTX
【DL輪読会】ViT + Self Supervised Learningまとめ
by
Deep Learning JP
PPTX
【DL輪読会】"A Generalist Agent"
by
Deep Learning JP
PPTX
【DL輪読会】Transformers are Sample Efficient World Models
by
Deep Learning JP
PPTX
[DL輪読会]“Spatial Attention Point Network for Deep-learning-based Robust Autono...
by
Deep Learning JP
PDF
Automatic Mixed Precision の紹介
by
Kuninobu SaSaki
PDF
[DL輪読会]近年のオフライン強化学習のまとめ —Offline Reinforcement Learning: Tutorial, Review, an...
by
Deep Learning JP
PDF
[DL輪読会]Convolutional Conditional Neural Processesと Neural Processes Familyの紹介
by
Deep Learning JP
【メタサーベイ】Neural Fields
by
cvpaper. challenge
20090924 姿勢推定と回転行列
by
Toru Tamaki
モデル高速化百選
by
Yusuke Uchida
【DL輪読会】High-Resolution Image Synthesis with Latent Diffusion Models
by
Deep Learning JP
SSII2021 [TS1] Visual SLAM ~カメラ幾何の基礎から最近の技術動向まで~
by
SSII
【DL輪読会】DiffRF: Rendering-guided 3D Radiance Field Diffusion [N. Muller+ CVPR2...
by
Deep Learning JP
2014 3 13(テンソル分解の基礎)
by
Tatsuya Yokota
[DL輪読会]Vision Transformer with Deformable Attention (Deformable Attention Tra...
by
Deep Learning JP
[DL輪読会]When Does Label Smoothing Help?
by
Deep Learning JP
[DL輪読会]AdaShare: Learning What To Share For Efficient Deep Multi-Task Learning
by
Deep Learning JP
[解説スライド] NeRF: Representing Scenes as Neural Radiance Fields for View Synthesis
by
Kento Doi
[DL輪読会]画像を使ったSim2Realの現況
by
Deep Learning JP
SSII2022 [TS1] Transformerの最前線〜 畳込みニューラルネットワークの先へ 〜
by
SSII
【DL輪読会】ViT + Self Supervised Learningまとめ
by
Deep Learning JP
【DL輪読会】"A Generalist Agent"
by
Deep Learning JP
【DL輪読会】Transformers are Sample Efficient World Models
by
Deep Learning JP
[DL輪読会]“Spatial Attention Point Network for Deep-learning-based Robust Autono...
by
Deep Learning JP
Automatic Mixed Precision の紹介
by
Kuninobu SaSaki
[DL輪読会]近年のオフライン強化学習のまとめ —Offline Reinforcement Learning: Tutorial, Review, an...
by
Deep Learning JP
[DL輪読会]Convolutional Conditional Neural Processesと Neural Processes Familyの紹介
by
Deep Learning JP
More from Deep Learning JP
PPTX
【DL輪読会】AdaptDiffuser: Diffusion Models as Adaptive Self-evolving Planners
by
Deep Learning JP
PPTX
【DL輪読会】事前学習用データセットについて
by
Deep Learning JP
PPTX
【DL輪読会】 "Learning to render novel views from wide-baseline stereo pairs." CVP...
by
Deep Learning JP
PPTX
【DL輪読会】Zero-Shot Dual-Lens Super-Resolution
by
Deep Learning JP
PPTX
【DL輪読会】BloombergGPT: A Large Language Model for Finance arxiv
by
Deep Learning JP
PPTX
【DL輪読会】マルチモーダル LLM
by
Deep Learning JP
PDF
【 DL輪読会】ToolLLM: Facilitating Large Language Models to Master 16000+ Real-wo...
by
Deep Learning JP
PPTX
【DL輪読会】AnyLoc: Towards Universal Visual Place Recognition
by
Deep Learning JP
PDF
【DL輪読会】Can Neural Network Memorization Be Localized?
by
Deep Learning JP
PPTX
【DL輪読会】Hopfield network 関連研究について
by
Deep Learning JP
PPTX
【DL輪読会】SimPer: Simple self-supervised learning of periodic targets( ICLR 2023 )
by
Deep Learning JP
PDF
【DL輪読会】RLCD: Reinforcement Learning from Contrast Distillation for Language M...
by
Deep Learning JP
PDF
【DL輪読会】"Secrets of RLHF in Large Language Models Part I: PPO"
by
Deep Learning JP
PPTX
【DL輪読会】"Language Instructed Reinforcement Learning for Human-AI Coordination "
by
Deep Learning JP
PPTX
【DL輪読会】Llama 2: Open Foundation and Fine-Tuned Chat Models
by
Deep Learning JP
PDF
【DL輪読会】"Learning Fine-Grained Bimanual Manipulation with Low-Cost Hardware"
by
Deep Learning JP
PPTX
【DL輪読会】Parameter is Not All You Need:Starting from Non-Parametric Networks fo...
by
Deep Learning JP
PDF
【DL輪読会】Drag Your GAN: Interactive Point-based Manipulation on the Generative ...
by
Deep Learning JP
PDF
【DL輪読会】Self-Supervised Learning from Images with a Joint-Embedding Predictive...
by
Deep Learning JP
PPTX
【DL輪読会】Towards Understanding Ensemble, Knowledge Distillation and Self-Distil...
by
Deep Learning JP
【DL輪読会】AdaptDiffuser: Diffusion Models as Adaptive Self-evolving Planners
by
Deep Learning JP
【DL輪読会】事前学習用データセットについて
by
Deep Learning JP
【DL輪読会】 "Learning to render novel views from wide-baseline stereo pairs." CVP...
by
Deep Learning JP
【DL輪読会】Zero-Shot Dual-Lens Super-Resolution
by
Deep Learning JP
【DL輪読会】BloombergGPT: A Large Language Model for Finance arxiv
by
Deep Learning JP
【DL輪読会】マルチモーダル LLM
by
Deep Learning JP
【 DL輪読会】ToolLLM: Facilitating Large Language Models to Master 16000+ Real-wo...
by
Deep Learning JP
【DL輪読会】AnyLoc: Towards Universal Visual Place Recognition
by
Deep Learning JP
【DL輪読会】Can Neural Network Memorization Be Localized?
by
Deep Learning JP
【DL輪読会】Hopfield network 関連研究について
by
Deep Learning JP
【DL輪読会】SimPer: Simple self-supervised learning of periodic targets( ICLR 2023 )
by
Deep Learning JP
【DL輪読会】RLCD: Reinforcement Learning from Contrast Distillation for Language M...
by
Deep Learning JP
【DL輪読会】"Secrets of RLHF in Large Language Models Part I: PPO"
by
Deep Learning JP
【DL輪読会】"Language Instructed Reinforcement Learning for Human-AI Coordination "
by
Deep Learning JP
【DL輪読会】Llama 2: Open Foundation and Fine-Tuned Chat Models
by
Deep Learning JP
【DL輪読会】"Learning Fine-Grained Bimanual Manipulation with Low-Cost Hardware"
by
Deep Learning JP
【DL輪読会】Parameter is Not All You Need:Starting from Non-Parametric Networks fo...
by
Deep Learning JP
【DL輪読会】Drag Your GAN: Interactive Point-based Manipulation on the Generative ...
by
Deep Learning JP
【DL輪読会】Self-Supervised Learning from Images with a Joint-Embedding Predictive...
by
Deep Learning JP
【DL輪読会】Towards Understanding Ensemble, Knowledge Distillation and Self-Distil...
by
Deep Learning JP
Recently uploaded
PDF
第25回FA設備技術勉強会_自宅で勉強するROS・フィジカルAIアイテム.pdf
by
TomohiroKusu
PDF
PCCC25(設立25年記念PCクラスタシンポジウム):東京大学情報基盤センター テーマ1/2/3「Society5.0の実現を目指す『計算・データ・学習...
by
PC Cluster Consortium
PPTX
DrupalCon Nara 2025の記録 .
by
iPride Co., Ltd.
PDF
基礎から学ぶ PostgreSQL の性能監視 (PostgreSQL Conference Japan 2025 発表資料)
by
NTT DATA Technology & Innovation
PDF
visionOS TC「新しいマイホームで過ごすApple Vision Proとの新生活」
by
Sugiyama Yugo
PDF
安価な ロジック・アナライザを アナライズ(?),Analyze report of some cheap logic analyzers
by
たけおか しょうぞう
第25回FA設備技術勉強会_自宅で勉強するROS・フィジカルAIアイテム.pdf
by
TomohiroKusu
PCCC25(設立25年記念PCクラスタシンポジウム):東京大学情報基盤センター テーマ1/2/3「Society5.0の実現を目指す『計算・データ・学習...
by
PC Cluster Consortium
DrupalCon Nara 2025の記録 .
by
iPride Co., Ltd.
基礎から学ぶ PostgreSQL の性能監視 (PostgreSQL Conference Japan 2025 発表資料)
by
NTT DATA Technology & Innovation
visionOS TC「新しいマイホームで過ごすApple Vision Proとの新生活」
by
Sugiyama Yugo
安価な ロジック・アナライザを アナライズ(?),Analyze report of some cheap logic analyzers
by
たけおか しょうぞう
[DL輪読会]Real-Time Semantic Stereo Matching
1.
Real-Time Semantic Stereo
Matching Sugisaki Hiroaki (B3, Sophia Univ) 1
2.
内容 ● Real-Time Semantic
Stereo Matching ○ https://arxiv.org/abs/1910.00541 ○ Pier Luigi Dovesi, Matteo Poggi, Lorenzo Andraghetti, Miquel Mart´, Hedvig Kjellstrom¨, Alessandro Pieropan, Stefano Mattoccia ○ 2019/10 ○ RTS2Net ■ セグメンテーションを取り入れたステレオマッチングモデル ■ ステレオマッチングを取り入れたセグメンテーションモデル ○ SOTAの複雑でコストのかかるモデルに比べて、計算効率を高めた、比較的シンプルなモデル の提案 ○ モデルの軽量化と精度のトレードオフを柔軟に切り替え 2
3.
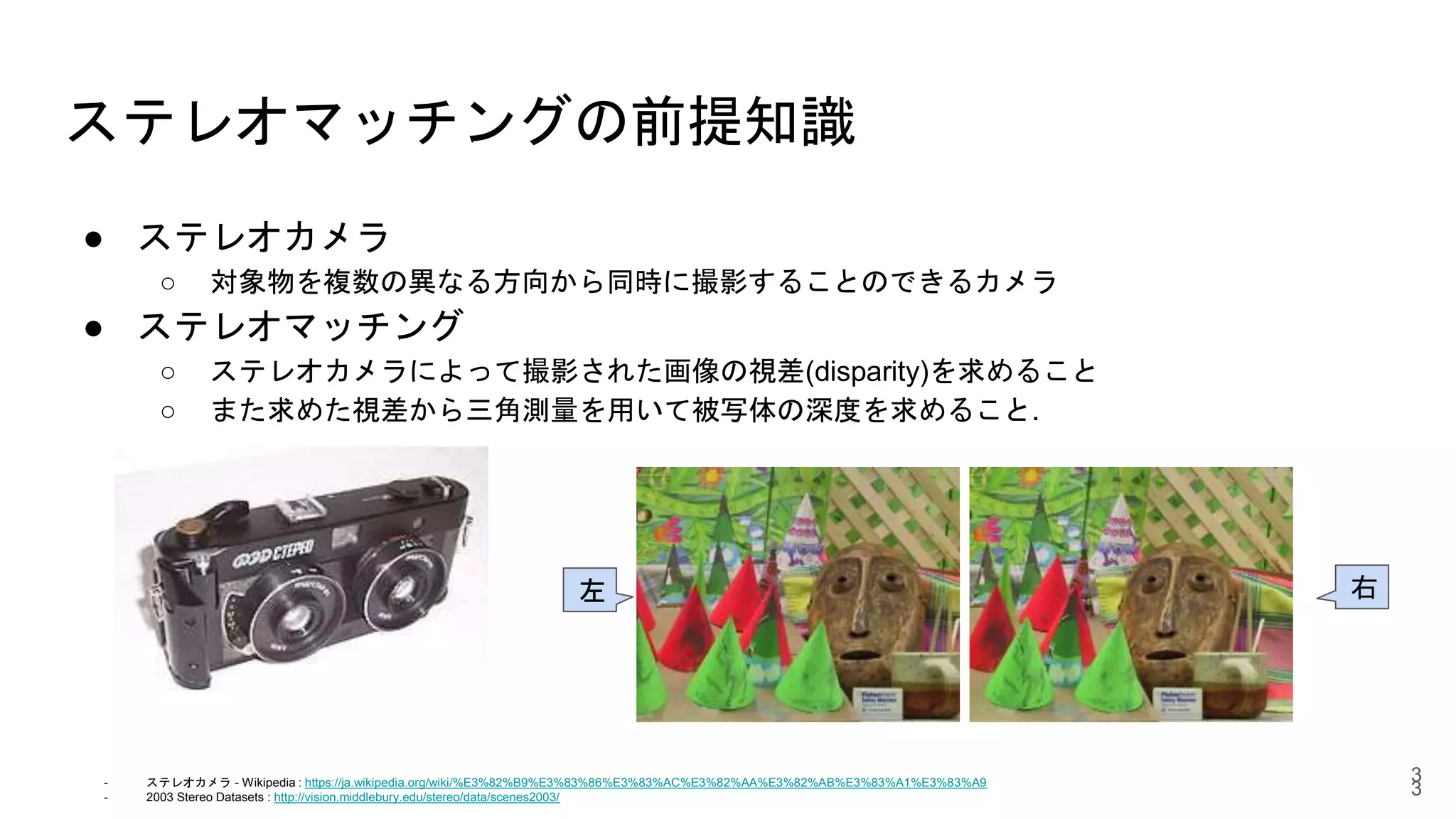
ステレオマッチングの前提知識 ● ステレオカメラ ○ 対象物を複数の異なる方向から同時に撮影することのできるカメラ ●
ステレオマッチング ○ ステレオカメラによって撮影された画像の視差(disparity)を求めること ○ また求めた視差から三角測量を用いて被写体の深度を求めること. 3 右左 - ステレオカメラ - Wikipedia : https://ja.wikipedia.org/wiki/%E3%82%B9%E3%83%86%E3%83%AC%E3%82%AA%E3%82%AB%E3%83%A1%E3%83%A9 - 2003 Stereo Datasets : http://vision.middlebury.edu/stereo/data/scenes2003/ 3
4.
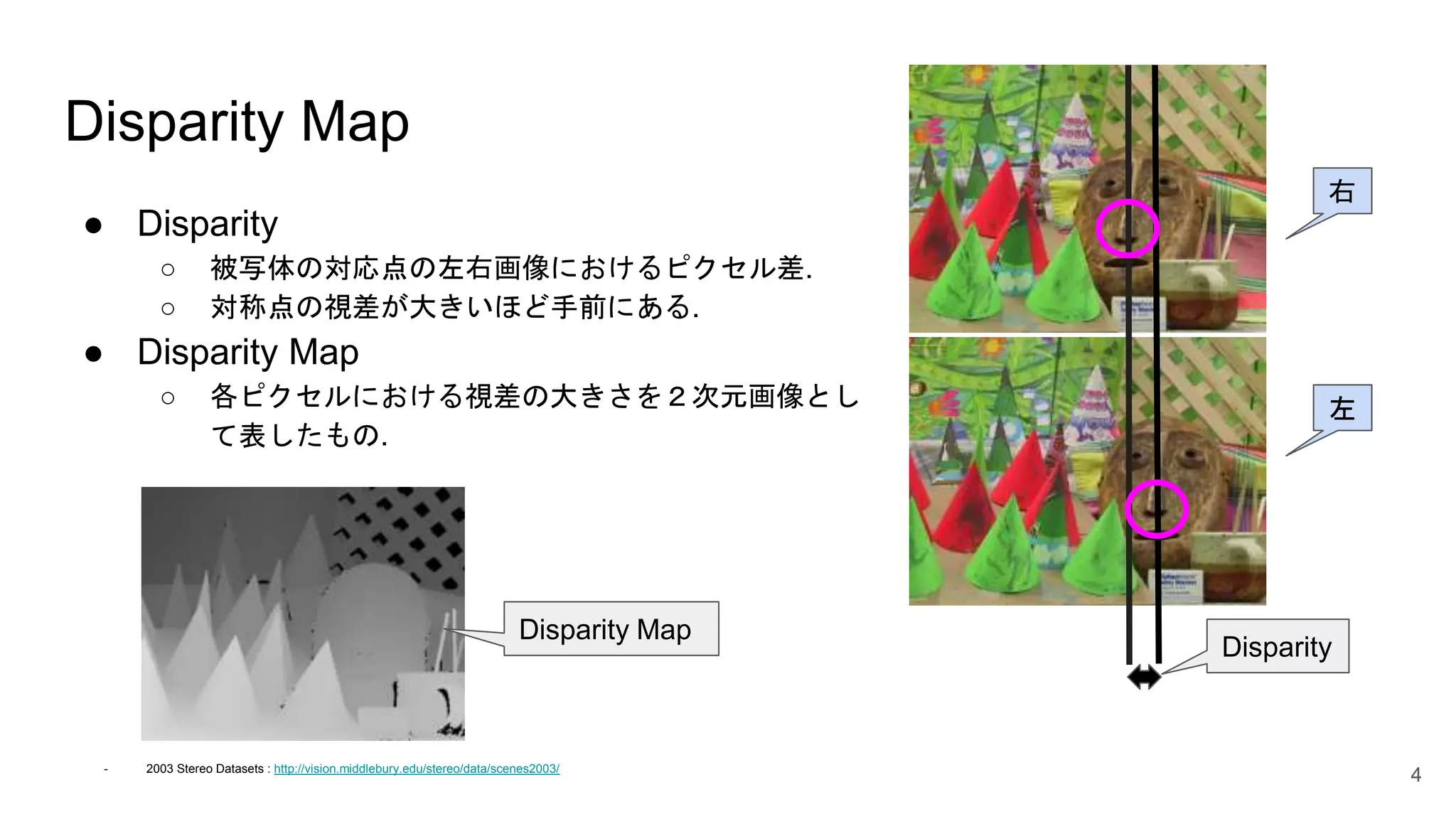
Disparity Map ● Disparity ○
被写体の対応点の左右画像におけるピクセル差. ○ 対称点の視差が大きいほど手前にある. ● Disparity Map ○ 各ピクセルにおける視差の大きさを2次元画像とし て表したもの. 4 右 左 Disparity Disparity Map - 2003 Stereo Datasets : http://vision.middlebury.edu/stereo/data/scenes2003/
5.
背景 ● ステレオマッチングとセグメンテーションは相互に関連がある ○ 光の反射などによる色合いの変化を苦手とするステレオマッチングにセグメンテーション情 報を与えることで、同一物に含まれる画素であることを知ることができる ●
先行研究により2つを関連付けたモデルは提案されている[8],[9] ○ モデルが複雑であり、推論速度も現実的ではない ● 軽量でシンプルなモデルの提案 5
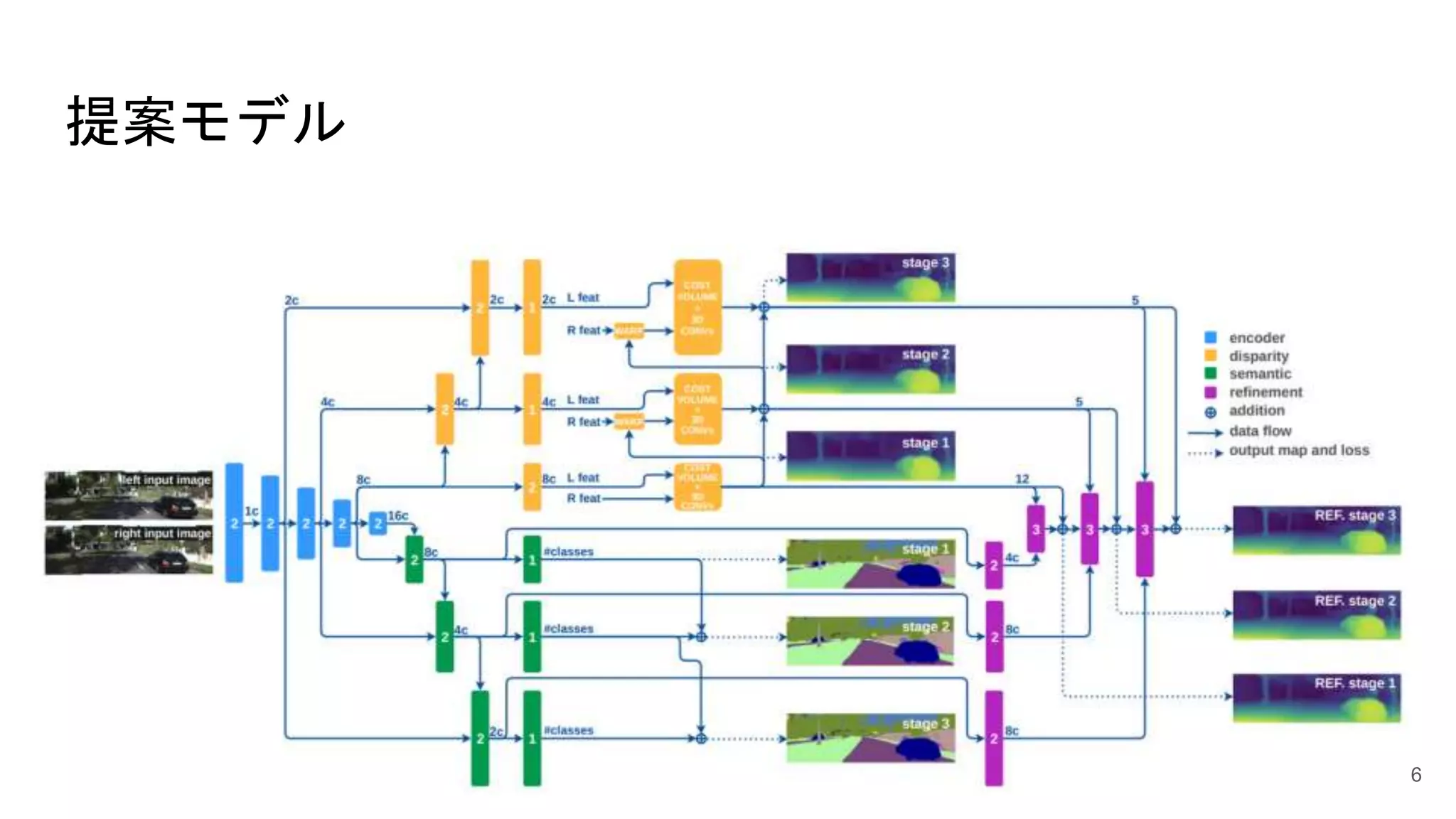
6.
提案モデル 6
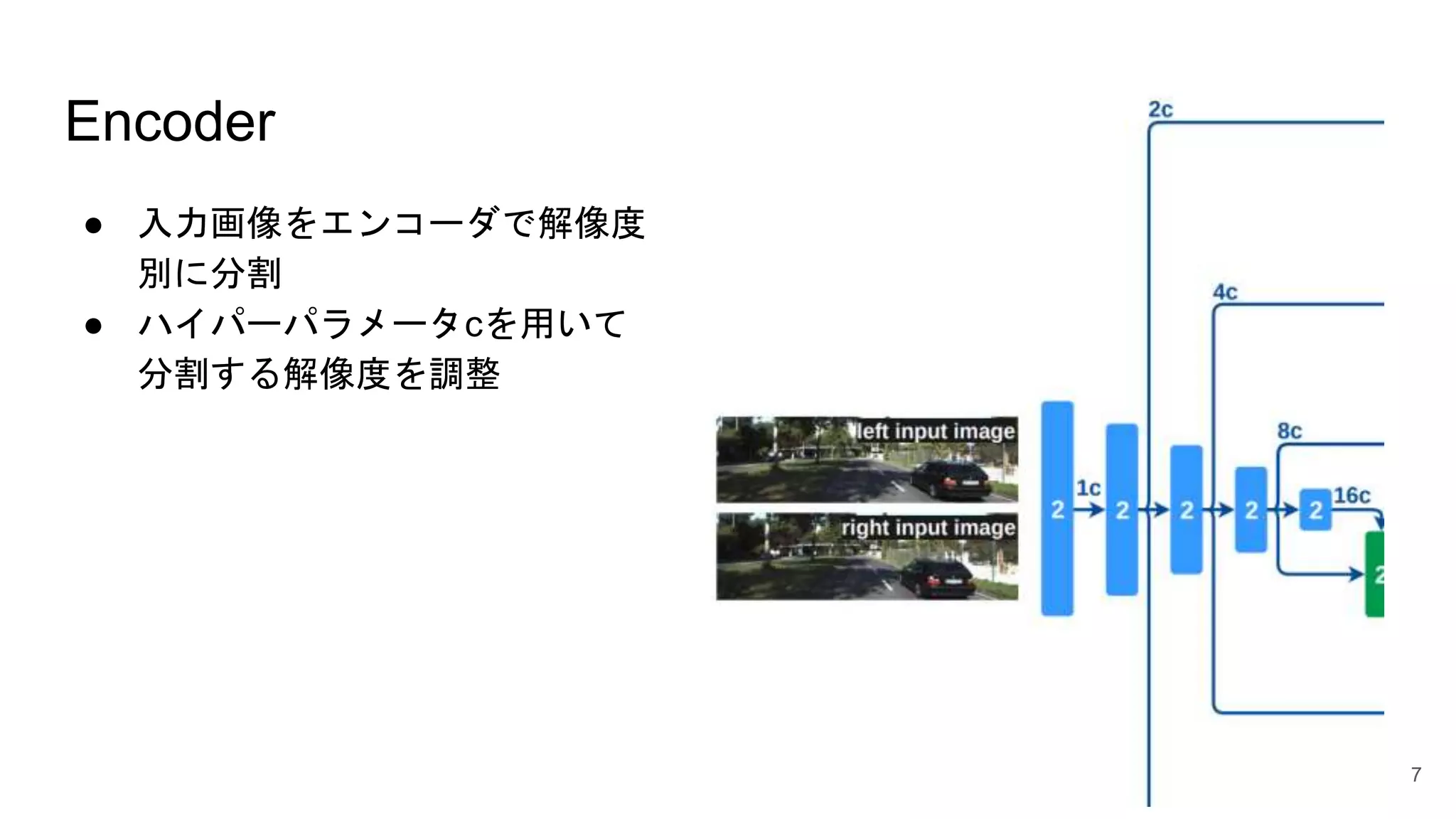
7.
Encoder ● 入力画像をエンコーダで解像度 別に分割 ● ハイパーパラメータcを用いて 分割する解像度を調整 7
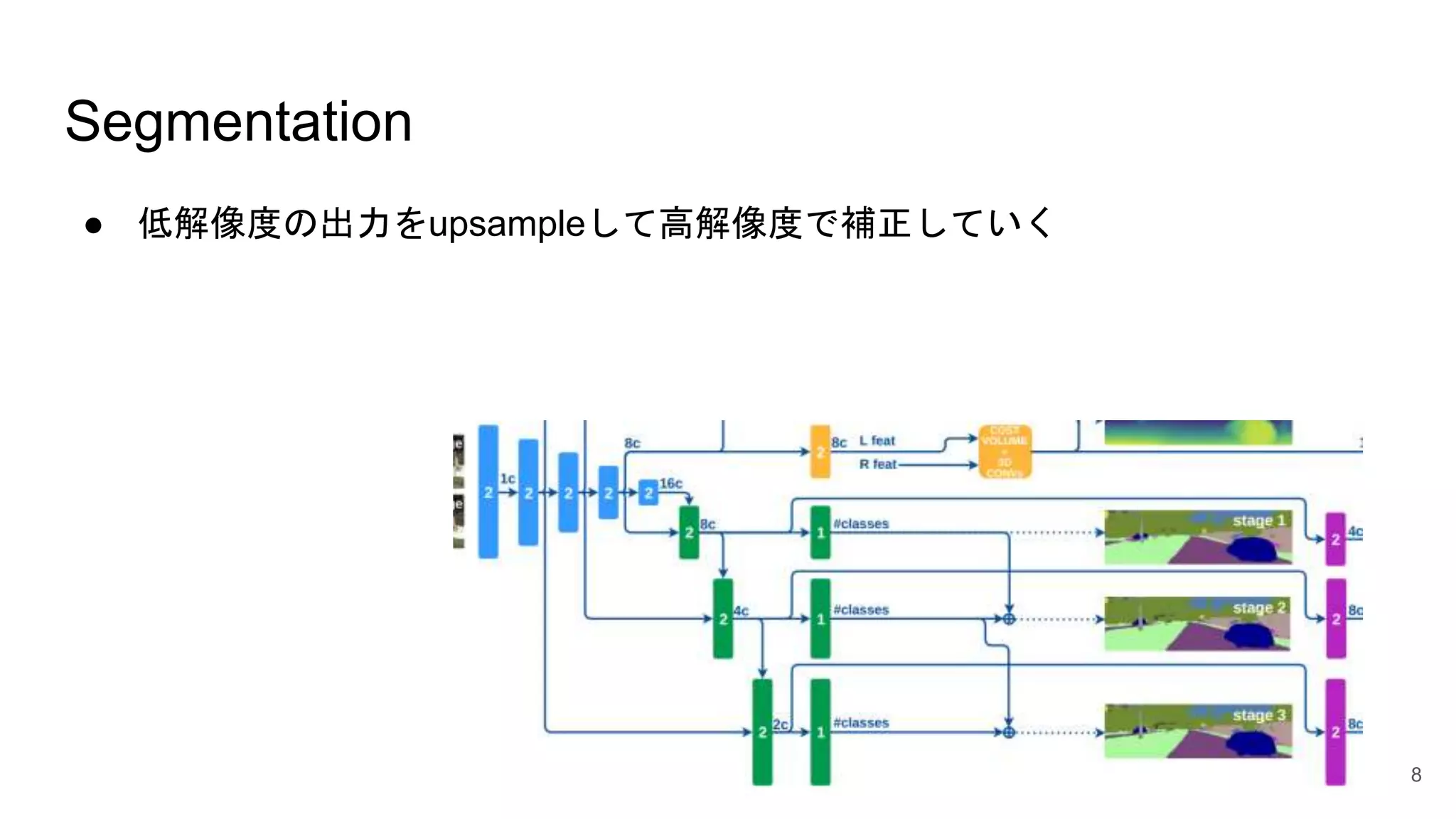
8.
Segmentation ● 低解像度の出力をupsampleして高解像度で補正していく 8
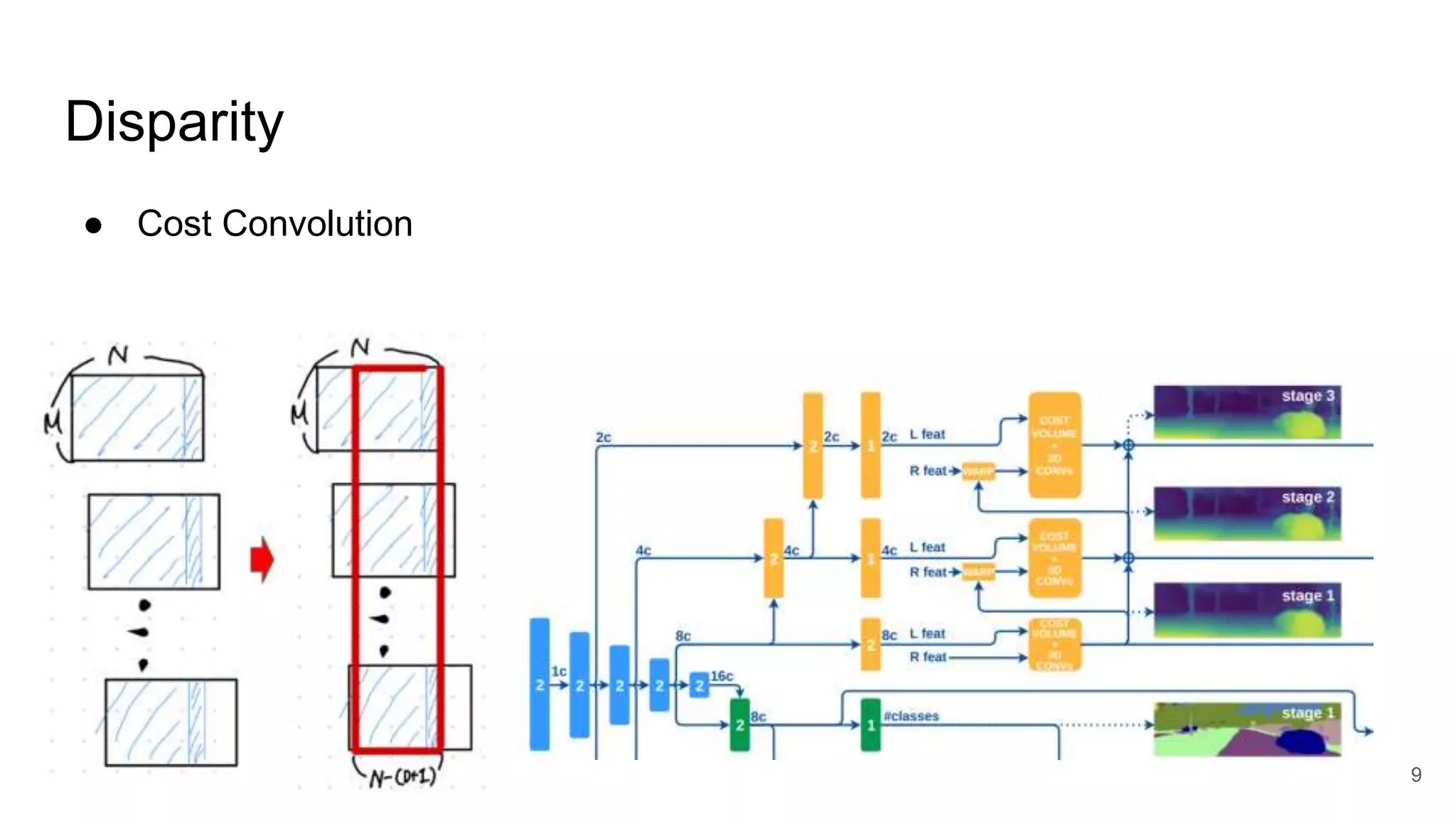
9.
Disparity ● Cost Convolution 9
10.
Refinement ● disparity mapとセグメンテー ションの行列をconcateと upsampleでrefineしていく ●
2つをembeddingする手法が 有効である先行研究あり [8],[9] 10
11.
実験 ● データセット ○ KITTI
2015 ● AnyNetとの比較 ○ AnyNet : RTS2Netのもとになっており、ステレオマッチング部のみを持つモデル ○ hyper-parameter : c を変更しての比較 ● KITTI 2015 Online Benchmark 比較 ○ Stereo Matching ○ Segmentation 11
12.
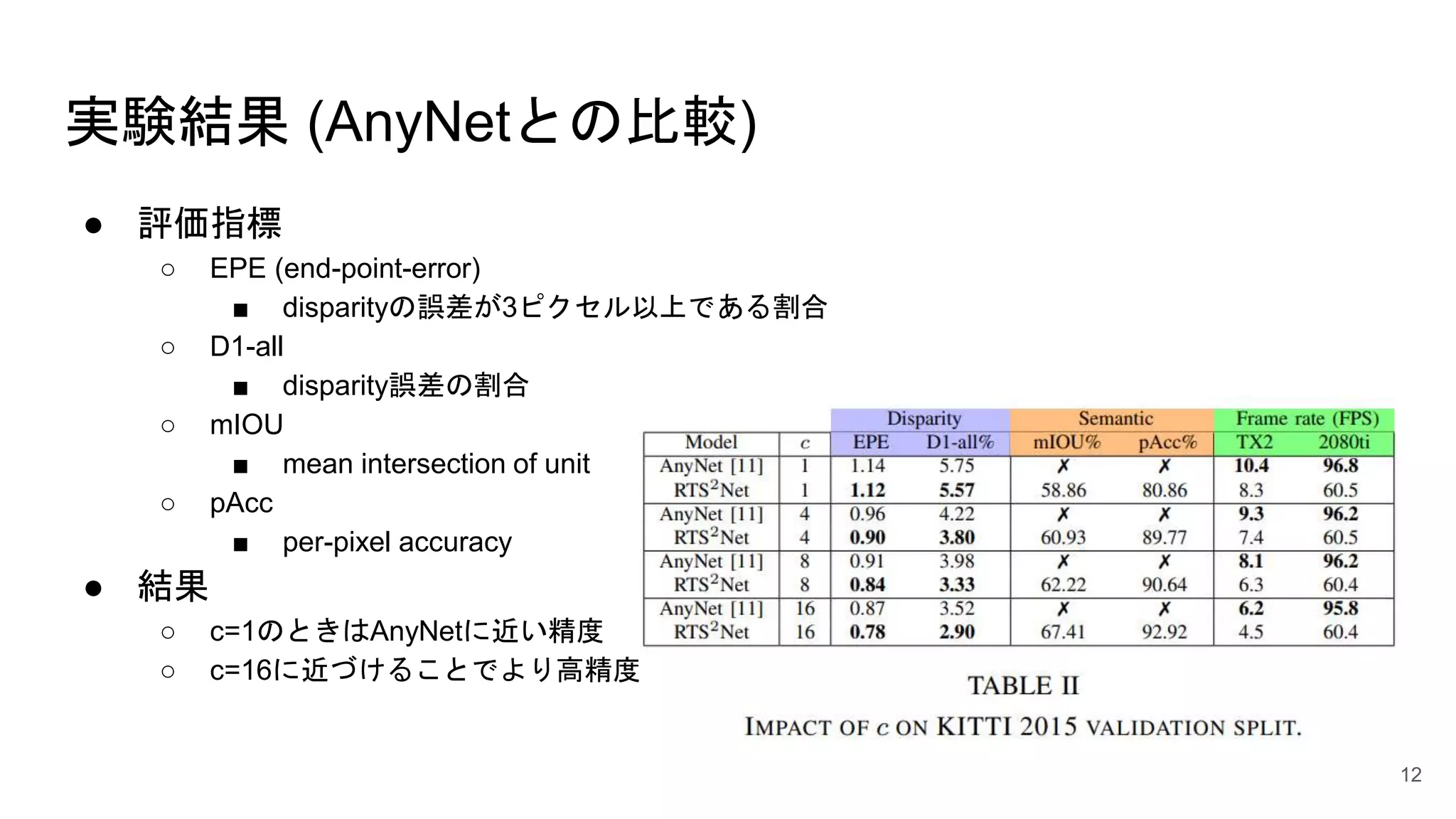
実験結果 (AnyNetとの比較) ● 評価指標 ○
EPE (end-point-error) ■ disparityの誤差が3ピクセル以上である割合 ○ D1-all ■ disparity誤差の割合 ○ mIOU ■ mean intersection of unit ○ pAcc ■ per-pixel accuracy ● 結果 ○ c=1のときはAnyNetに近い精度 ○ c=16に近づけることでより高精度 12
13.
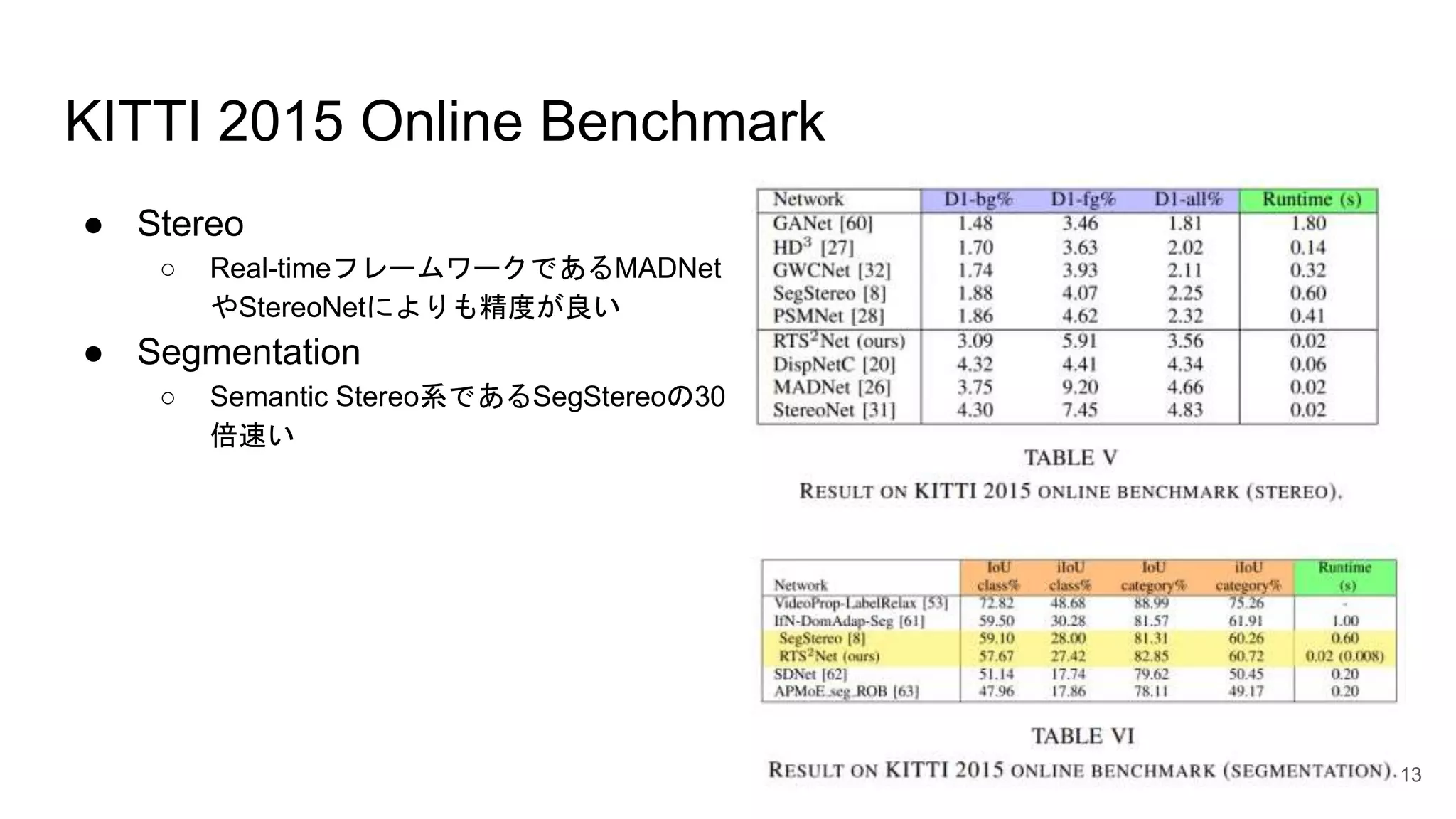
KITTI 2015 Online
Benchmark ● Stereo ○ Real-timeフレームワークであるMADNet やStereoNetによりも精度が良い ● Segmentation ○ Semantic Stereo系であるSegStereoの30 倍速い 13
14.
まとめ ● ハイパーパラメータを変えることで柔軟に軽量化をはかることができる ● Real-Time系のSOTAに近い精度を出すことができている 14
Editor's Notes
#5
http://vision.middlebury.edu/stereo/data/scenes2003/
Download
![背景
● ステレオマッチングとセグメンテーションは相互に関連がある
○ 光の反射などによる色合いの変化を苦手とするステレオマッチングにセグメンテーション情
報を与えることで、同一物に含まれる画素であることを知ることができる
● 先行研究により2つを関連付けたモデルは提案されている[8],[9]
○ モデルが複雑であり、推論速度も現実的ではない
● 軽量でシンプルなモデルの提案
5](https://image.slidesharecdn.com/real-timesemanticstereomatching-sugisakihiroaki-191213003224/75/DL-Real-Time-Semantic-Stereo-Matching-5-2048.jpg)
![Refinement
● disparity mapとセグメンテー
ションの行列をconcateと
upsampleでrefineしていく
● 2つをembeddingする手法が
有効である先行研究あり
[8],[9]
10](https://image.slidesharecdn.com/real-timesemanticstereomatching-sugisakihiroaki-191213003224/75/DL-Real-Time-Semantic-Stereo-Matching-10-2048.jpg)







![[DL輪読会]Model soups: averaging weights of multiple fine-tuned models improves ...](https://cdn.slidesharecdn.com/ss_thumbnails/dl0401-220405031053-thumbnail.jpg?width=640&height=640&fit=bounds)





![SSII2021 [TS1] Visual SLAM ~カメラ幾何の基礎から最近の技術動向まで~](https://cdn.slidesharecdn.com/ss_thumbnails/ts1-01-210607042113-thumbnail.jpg?width=640&height=640&fit=bounds)


![[DL輪読会]Vision Transformer with Deformable Attention (Deformable Attention Tra...](https://cdn.slidesharecdn.com/ss_thumbnails/dl0114-220114032933-thumbnail.jpg?width=640&height=640&fit=bounds)
![[DL輪読会]When Does Label Smoothing Help?](https://cdn.slidesharecdn.com/ss_thumbnails/yokota20191227dl-191227001522-thumbnail.jpg?width=640&height=640&fit=bounds)
![[DL輪読会]AdaShare: Learning What To Share For Efficient Deep Multi-Task Learning](https://cdn.slidesharecdn.com/ss_thumbnails/dl1211-191213002847-thumbnail.jpg?width=640&height=640&fit=bounds)
![[解説スライド] NeRF: Representing Scenes as Neural Radiance Fields for View Synthesis](https://cdn.slidesharecdn.com/ss_thumbnails/nerf20200327slideshare-200326131430-thumbnail.jpg?width=640&height=640&fit=bounds)
![[DL輪読会]画像を使ったSim2Realの現況](https://cdn.slidesharecdn.com/ss_thumbnails/imagesim2real-201030025320-thumbnail.jpg?width=640&height=640&fit=bounds)
![SSII2022 [TS1] Transformerの最前線〜 畳込みニューラルネットワークの先へ 〜](https://cdn.slidesharecdn.com/ss_thumbnails/ts120220608ssiitransformerr2-220607054025-3adacf07-thumbnail.jpg?width=640&height=640&fit=bounds)



![[DL輪読会]“Spatial Attention Point Network for Deep-learning-based Robust Autono...](https://cdn.slidesharecdn.com/ss_thumbnails/20210729kokiyamane-210730035349-thumbnail.jpg?width=640&height=640&fit=bounds)

![[DL輪読会]近年のオフライン強化学習のまとめ —Offline Reinforcement Learning: Tutorial, Review, an...](https://cdn.slidesharecdn.com/ss_thumbnails/20200626journalclubpub-200630064755-thumbnail.jpg?width=640&height=640&fit=bounds)
![[DL輪読会]Convolutional Conditional Neural Processesと Neural Processes Familyの紹介](https://cdn.slidesharecdn.com/ss_thumbnails/20191220readingpaperconvcnp-191220034420-thumbnail.jpg?width=640&height=640&fit=bounds)

























