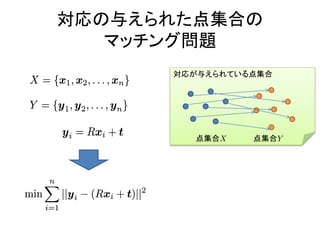
車輪の再発明
• Orthogonal Procrustes • Absolute Orientation
Problem – 写真測量学・光学
– 心理学分野 (Photogrammetria, J.
(Psychometrikaなど) Optical Soc. of America
など)
• Wahba’s Problem
– 天文学分野
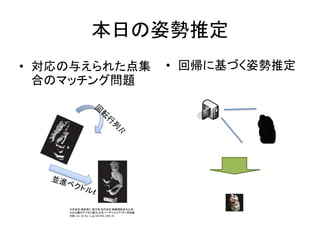
• Fitting corresponding
point sets
– コンピュータビジョン
(IEEE PAMIなど)
19.
Orthogonal Procrustes Problem
Hurley et. al, 1962
[11] Schönemman, 1966
Procrustes. "Now then, you fellows; I
[3] Schönemman et. al, 1970
mean to fit you all to my little bed!"
[5] Akca, 2003
Chorus. "Oh lor-r!!"
Orthogonal Procrustes
Extended Orthogonal Procrustes
Generalized Orthogonal Procrustes
File:The Modern Bed of Procustes - Punch cartoon - Project
Gutenberg eText 13961.png
http://commons.wikimedia.org/wiki/File:The_Modern_Bed_of_Proc
ustes_-_Punch_cartoon_-_Project_Gutenberg_eText_13961.png
20.
Wahba’s Problem
Wahba, 1965
Prof. Grace Wahba [6] Shuster, 2006
(University of Wisconsin-Madison) [7] Markley, 1999
正の重み
spacecraft座標系 基準座標系
での方向 での方向
http://www.stat.wisc.edu/~wahba/public/jpg/jsm.05/noether.html
Grace Wahba, “Problem 65–1: A Least Squares Estimate of
Spacecraft Attitude,” SIAM Review, Vol. 7, No. 3, July 1965, p. 409.
21.
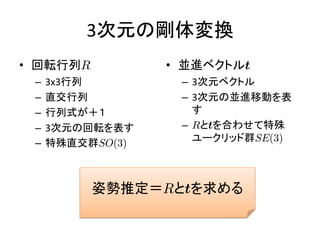
Absolute Orientation
[8] Thompson, 1958
[16] Horn, 1987
[9] Horn et. al, 1988
‘
E. H. Thompson, "An exact linear solution of
the problem of absolute orientation,"
Photogrammetria 15(4), 163–179 (1958).

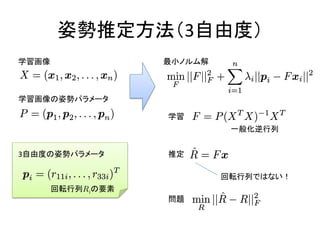
![Lagrange乗数を用いた解法
[14] Umeyama, 1991
制約条件
最小化する項
直交行列 行列式が+1
6つの異なるLagrange乗数を Lagrange乗数
要素に持つ3x3対称行列](https://image.slidesharecdn.com/20090924-121121024341-phpapp01/85/20090924-13-320.jpg)
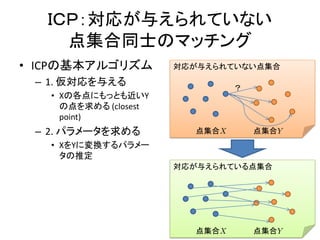
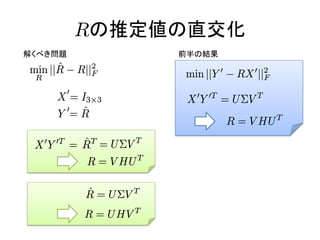
![SVDを用いた解法 [10] Arun et. al, 1987
[11] Schönemman, 1966
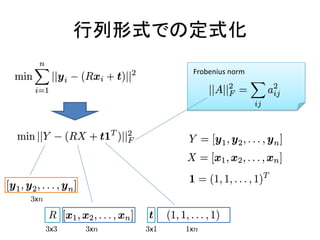
• Frobenius normと行列 • 目的関数の変形
のトレース(tr)
• トレースの性質](https://image.slidesharecdn.com/20090924-121121024341-phpapp01/85/20090924-14-320.jpg)
![SVDを用いた解法 [10] Arun et. al, 1987
[11] Schönemman, 1966
• トレースの最大値
特異値分解
(Singular Value Decomposition, SVD)
直交行列 対角行列
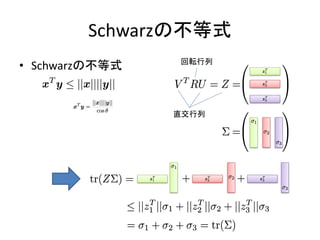
Schwarzの不等式
最大値を与えるのは](https://image.slidesharecdn.com/20090924-121121024341-phpapp01/85/20090924-15-320.jpg)
![SVDを用いた解法 [12] Kanatani, 1994
[14] Umeyama, 1991
• 行列式+1の制約 • Polar decomposition
V,Uは直交行列
行列式が±1
polar部分(行列式が1)](https://image.slidesharecdn.com/20090924-121121024341-phpapp01/85/20090924-17-320.jpg)
![Orthogonal Procrustes Problem
Hurley et. al, 1962
[11] Schönemman, 1966
Procrustes. "Now then, you fellows; I
[3] Schönemman et. al, 1970
mean to fit you all to my little bed!"
[5] Akca, 2003
Chorus. "Oh lor-r!!"
Orthogonal Procrustes
Extended Orthogonal Procrustes
Generalized Orthogonal Procrustes
File:The Modern Bed of Procustes - Punch cartoon - Project
Gutenberg eText 13961.png
http://commons.wikimedia.org/wiki/File:The_Modern_Bed_of_Proc
ustes_-_Punch_cartoon_-_Project_Gutenberg_eText_13961.png](https://image.slidesharecdn.com/20090924-121121024341-phpapp01/85/20090924-19-320.jpg)
![Wahba’s Problem
Wahba, 1965
Prof. Grace Wahba [6] Shuster, 2006
(University of Wisconsin-Madison) [7] Markley, 1999
正の重み
spacecraft座標系 基準座標系
での方向 での方向
http://www.stat.wisc.edu/~wahba/public/jpg/jsm.05/noether.html
Grace Wahba, “Problem 65–1: A Least Squares Estimate of
Spacecraft Attitude,” SIAM Review, Vol. 7, No. 3, July 1965, p. 409.](https://image.slidesharecdn.com/20090924-121121024341-phpapp01/85/20090924-20-320.jpg)
![Absolute Orientation
[8] Thompson, 1958
[16] Horn, 1987
[9] Horn et. al, 1988
‘
E. H. Thompson, "An exact linear solution of
the problem of absolute orientation,"
Photogrammetria 15(4), 163–179 (1958).](https://image.slidesharecdn.com/20090924-121121024341-phpapp01/85/20090924-21-320.jpg)
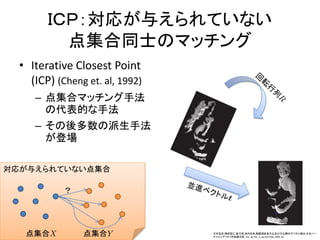
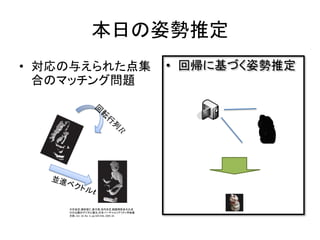
![Fitting corresponding point sets
[10] Arun et. al, 1987
[14] Umeyama, 1991
[12] Kanatani, 1994
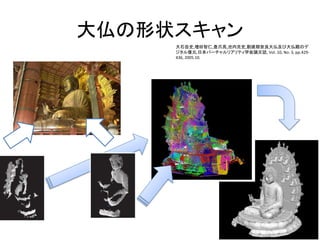
大石岳史,増田智仁,倉爪亮,池内克史,創建期奈良大仏及び大仏殿のデジタル復元,日本バー
チャルリアリティ学会論文誌, Vol. 10, No. 3, pp.429-436, 2005.10.](https://image.slidesharecdn.com/20090924-121121024341-phpapp01/85/20090924-22-320.jpg)










![SSII2021 [TS1] Visual SLAM ~カメラ幾何の基礎から最近の技術動向まで~](https://cdn.slidesharecdn.com/ss_thumbnails/ts1-01-210607042113-thumbnail.jpg?width=640&height=640&fit=bounds)







![[DL輪読会]NeRF: Representing Scenes as Neural Radiance Fields for View Synthesis](https://cdn.slidesharecdn.com/ss_thumbnails/nerfdlseminar1-200327021512-thumbnail.jpg?width=640&height=640&fit=bounds)


























































