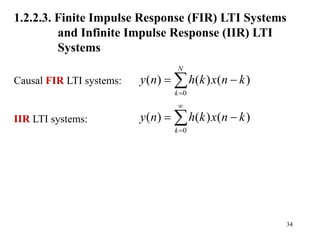
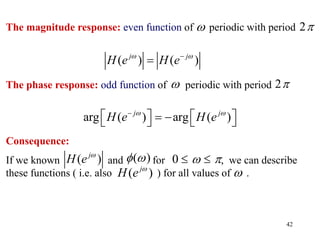
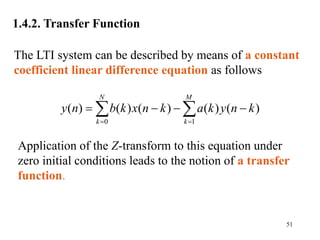
1. The document summarizes a lecture on discrete-time signals and systems.
2. It defines different types of signals, including discrete-time and discrete-valued signals which are relevant for digital filter theory.
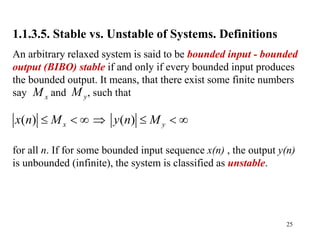
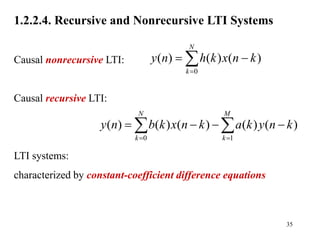
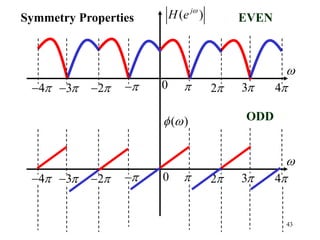
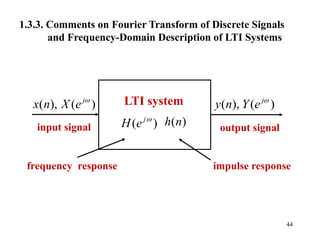
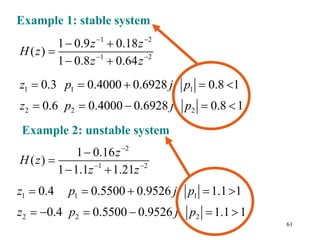
3. It also classifies systems as static vs. dynamic, time-invariant vs. time-variable, linear vs. nonlinear, causal vs. non-causal, stable vs. unstable, and recursive vs. non-recursive.
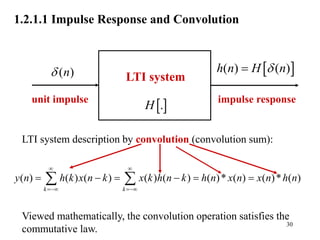
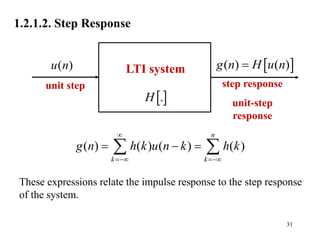
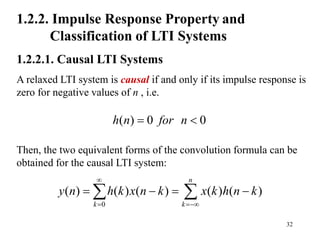
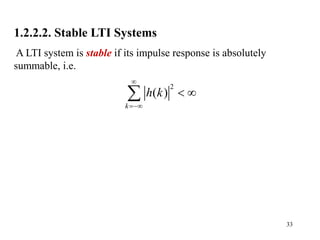
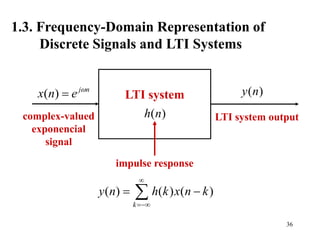
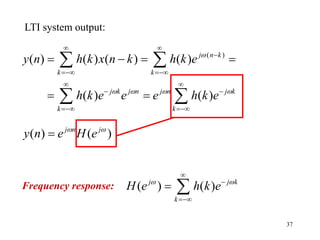
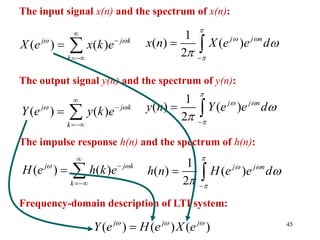
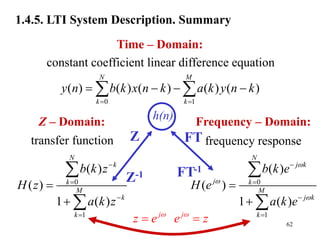
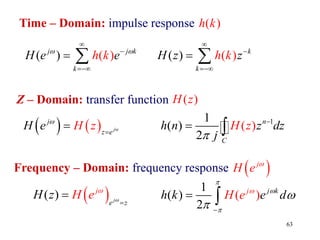
4. It describes the time-domain representation of linear, time-invariant (LTI) systems using impulse response and convolution.

![15
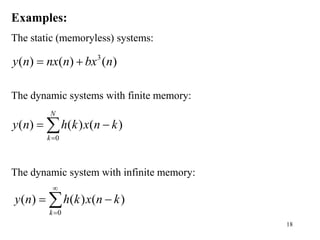
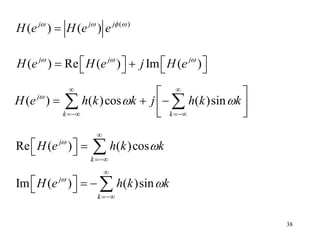
1.1.2. Discrete-Time Systems. Definition
A discrete-time system is a device or algorithm that
operates on a discrete-time signal called the input or
excitation (e.g. x(n)), according to some rule (e.g. H[.])
to produce another discrete-time signal called the output
or response (e.g. y(n)).
( ) ( )
y n H x n
This expression denotes also the transformation H[.]
(also called operator or mapping) or processing
performed by the system on x(n) to produce y(n).](https://image.slidesharecdn.com/dflesson01-230403175932-c16e5c35/85/df_lesson_01-ppt-15-320.jpg)
![19
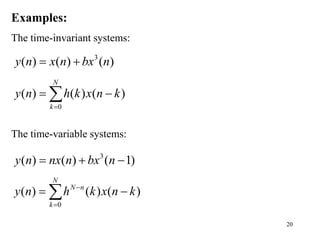
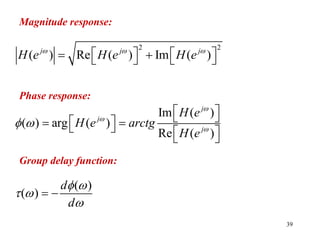
1.1.3.2. Time-Invariant vs. Time-Variable Systems.
Definition
A discrete-time system is called time-invariant if its input-output
characteristics do not change with time. In the other case, the
system is called time-variable.
Definition. A relaxed system is time- or shift-invariant if
only if
implies that
for every input signal and every time shift k .
[.]
H
( ) ( )
H
x n y n
( ) ( )
H
x n k y n k
( )
x n
( ) ( )
y n H x n
( ) ( )
y n k H x n k
](https://image.slidesharecdn.com/dflesson01-230403175932-c16e5c35/85/df_lesson_01-ppt-19-320.jpg)
![21
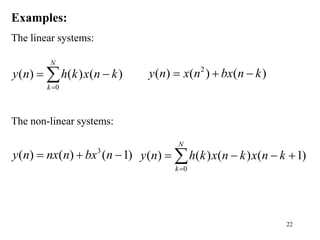
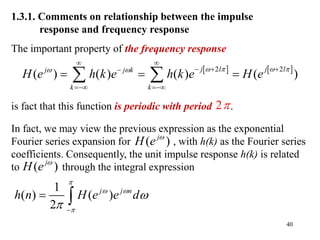
1.1.3.3. Linear vs. Non-linear Systems. Definition
A discrete-time system is called linear if only if it satisfies the linear
superposition principle. In the other case, the system is called non-
linear.
Definition. A relaxed system is linear if only if
for any arbitrary input sequences and , and any
arbitrary constants and .
The multiplicative (scaling) property of a linear system:
The additivity property of a linear system:
[.]
H
1 1 2 2 1 1 2 2
( ) ( ) ( ) ( )
H a x n a x n a H x n a H x n
1( )
x n 2 ( )
x n
1
a 2
a
1 1 1 1
( ) ( )
H a x n a H x n
1 2 1 2
( ) ( ) ( ) ( )
H x n x n H x n H x n
](https://image.slidesharecdn.com/dflesson01-230403175932-c16e5c35/85/df_lesson_01-ppt-21-320.jpg)
![23
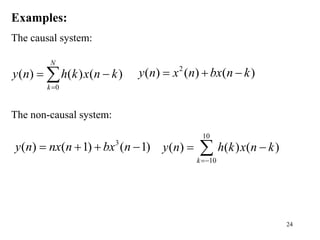
1.1.3.4. Causal vs. Non-causal Systems. Definition
Definition. A system is said to be causal if the output of the system
at any time n (i.e., y(n)) depends only on present and past inputs
(i.e., x(n), x(n-1), x(n-2), … ). In mathematical terms, the output of a
causal system satisfies an equation of the form
where is some arbitrary function. If a system does not satisfy
this definition, it is called non-causal.
( ) ( ), ( 1), ( 2),
y n F x n x n x n
[.]
F](https://image.slidesharecdn.com/dflesson01-230403175932-c16e5c35/85/df_lesson_01-ppt-23-320.jpg)
![27
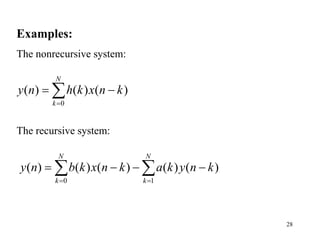
1.1.3.6. Recursive vs. Non-recursive Systems.
Definitions
A system whose output y(n) at time n depends on any number of the
past outputs values ( e.g. y(n-1), y(n-2), … ), is called a recursive
system. Then, the output of a causal recursive system can be
expressed in general as
where F[.] is some arbitrary function. In contrast, if y(n) at time n
depends only on the present and past inputs
then such a system is called nonrecursive.
( ) ( 1), ( 2), , ( ), ( ), ( 1), , ( )
y n F y n y n y n N x n x n x n M
( ) ( ), ( 1), , ( )
y n F x n x n x n M
](https://image.slidesharecdn.com/dflesson01-230403175932-c16e5c35/85/df_lesson_01-ppt-27-320.jpg)
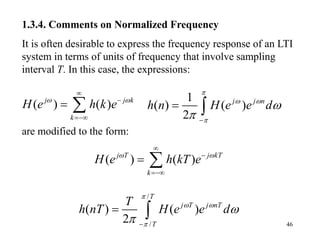
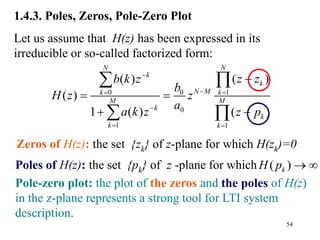
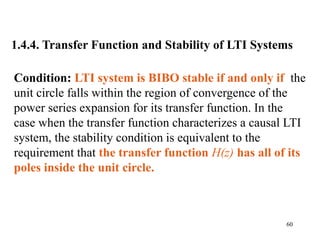
![49
1.4.1. Z -Transform
Since Z – transform is an infinite power series, it exists
only for those values of z for which this series converges.
The region of convergence of X(z) is the set of all values
of z for which X(z) attains a finite value.
Definition: The Z – transform of a discrete-time signal x(n)
is defined as the power series:
( ) ( ) k
k
X z x n z
( ) [ ( )]
X z Z x n
where z is a complex variable. The above given relations
are sometimes called the direct Z - transform because
they transform the time-domain signal x(n) into its
complex-plane representation X(z).](https://image.slidesharecdn.com/dflesson01-230403175932-c16e5c35/85/df_lesson_01-ppt-49-320.jpg)
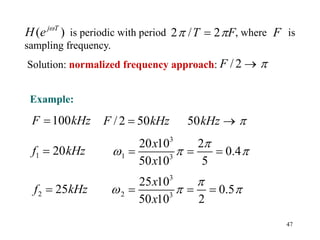
![52
LTI System
( ) ( )
Y z Z y n
input signal
( )
x n
( ) ( )
X z Z x n
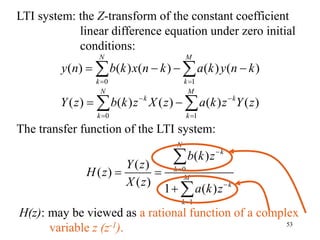
Transfer function: the ratio of the Z - transform of the
output signal and the Z - transform of the input signal of
the LTI system:
( ) [ ( )]
( )
( ) [ ( )]
Y z Z y n
H z
X z Z x n
output signal
( )
y n
( )
H z
( ) ( )
H z Z h n
( )
h n](https://image.slidesharecdn.com/dflesson01-230403175932-c16e5c35/85/df_lesson_01-ppt-52-320.jpg)
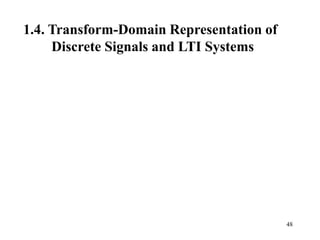
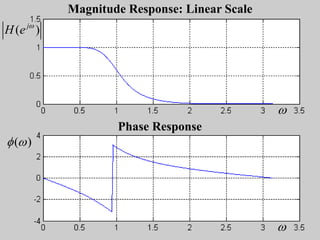
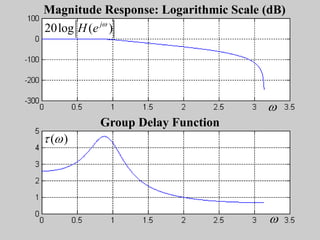
![55
Example: the 4-th order Butterworth low-pass filter,
cut off frequency .
1 3
0
1
( )
( )
1 ( )
N
k
k
M
k
k
b k z
H z
a k z
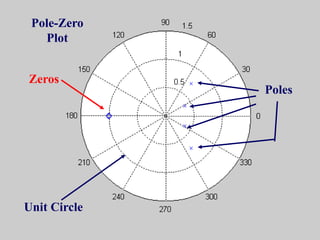
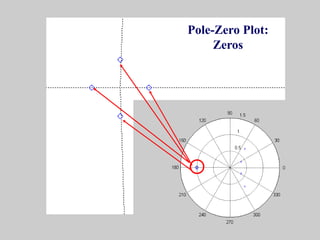
z1= -1.0002, z2= -1.0000 + 0.0002j
z3= -1.0000 - 0.0002j, z4= -0.9998
0
1
( )
( )
1 ( )
N
k
k
M
k
k
b k z
H z
a k z
b =[ 0.0186 0.0743 0.1114 0.0743 0.0186 ]
a =[ 1.0000 -1.5704 1.2756 -0.4844 0.0762 ]
p1= 0.4488 + 0.5707j, p2= 0.4488 - 0.5707j
p3= 0.3364 + 0.1772j, p4= 0.3364 - 0.1772j](https://image.slidesharecdn.com/dflesson01-230403175932-c16e5c35/85/df_lesson_01-ppt-55-320.jpg)

















![Digital Signal Processing[ECEG-3171]-Ch1_L03](https://cdn.slidesharecdn.com/ss_thumbnails/dspl3-180427094423-thumbnail.jpg?width=640&height=640&fit=bounds)



























