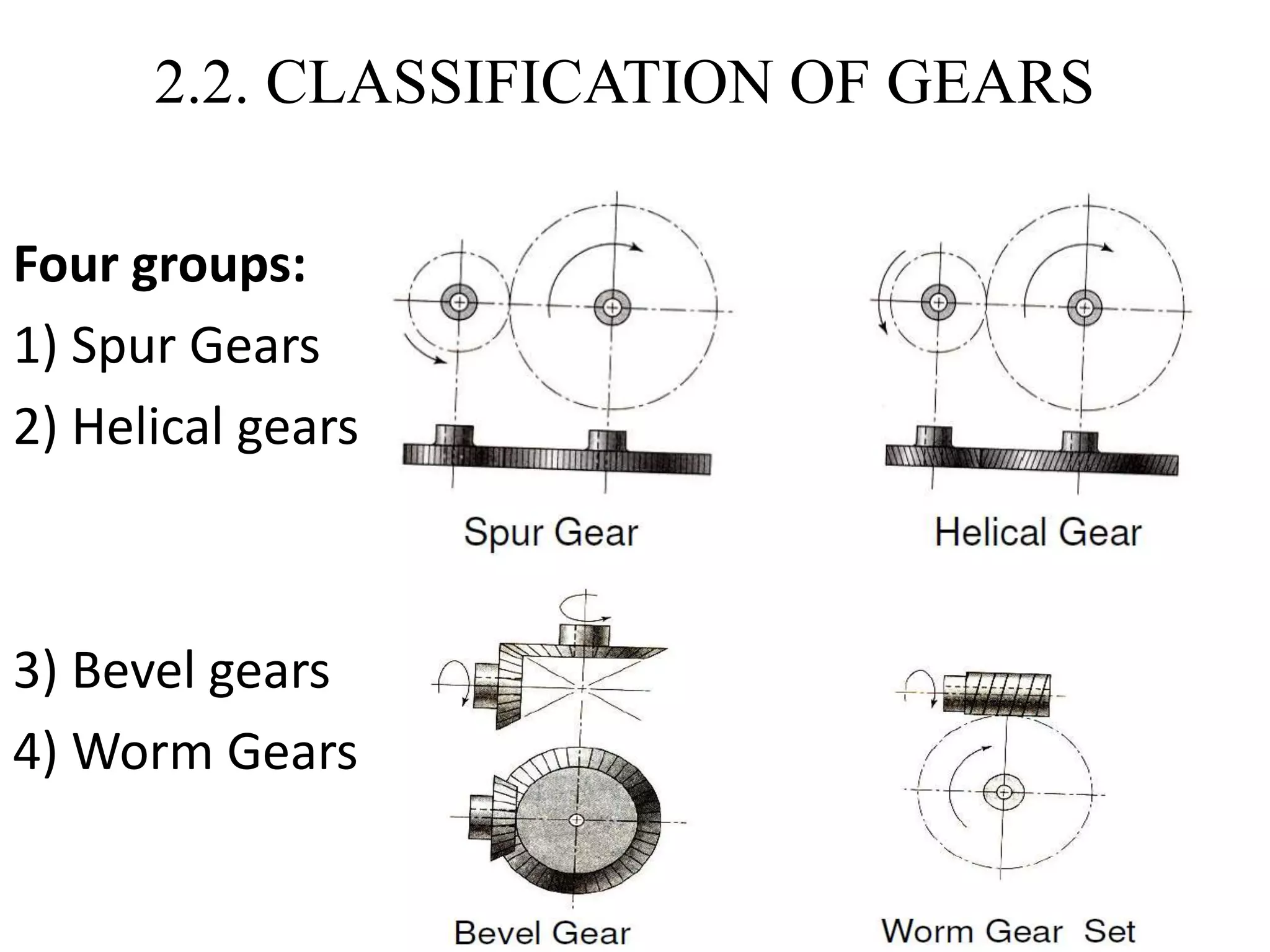
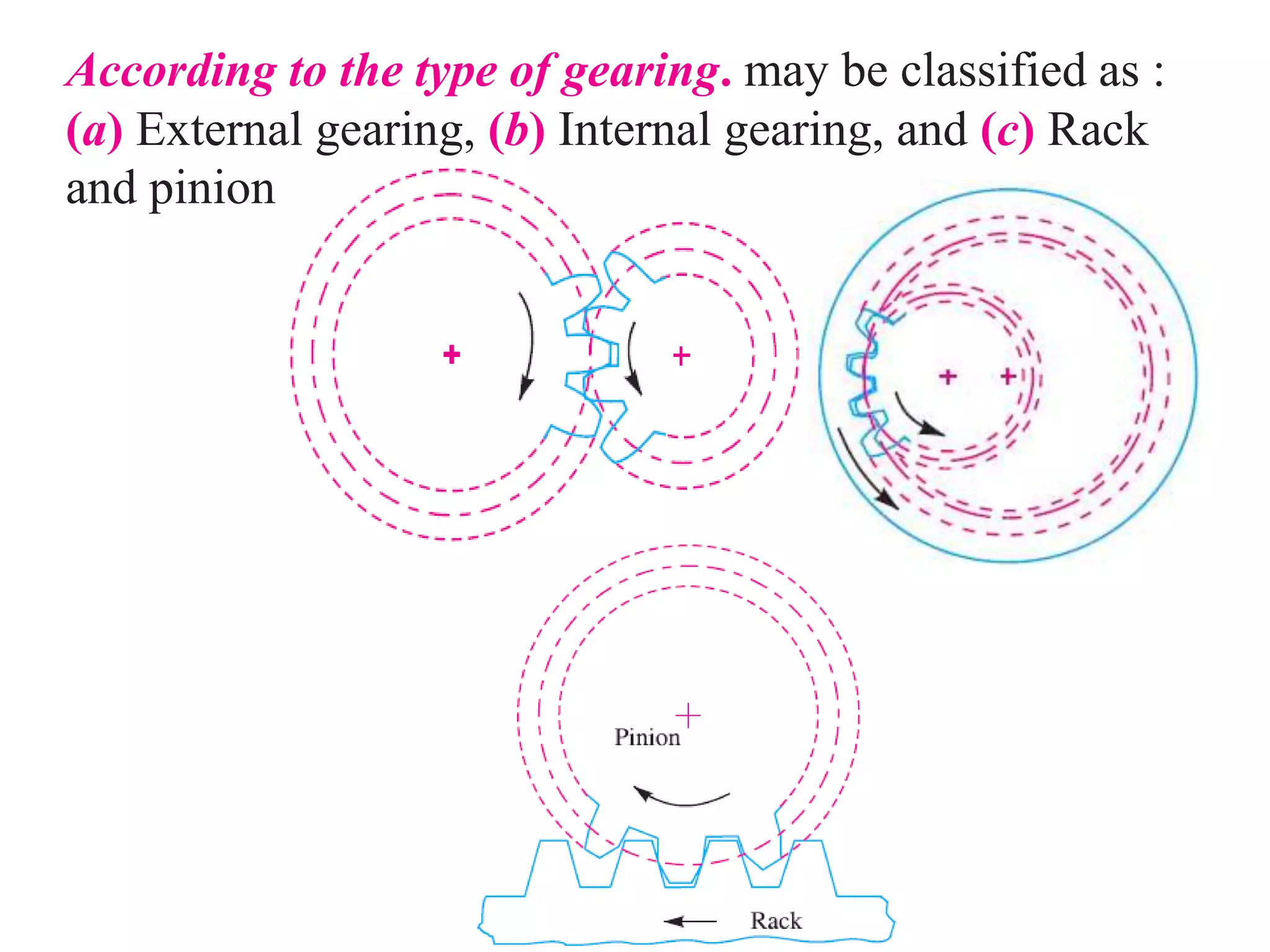
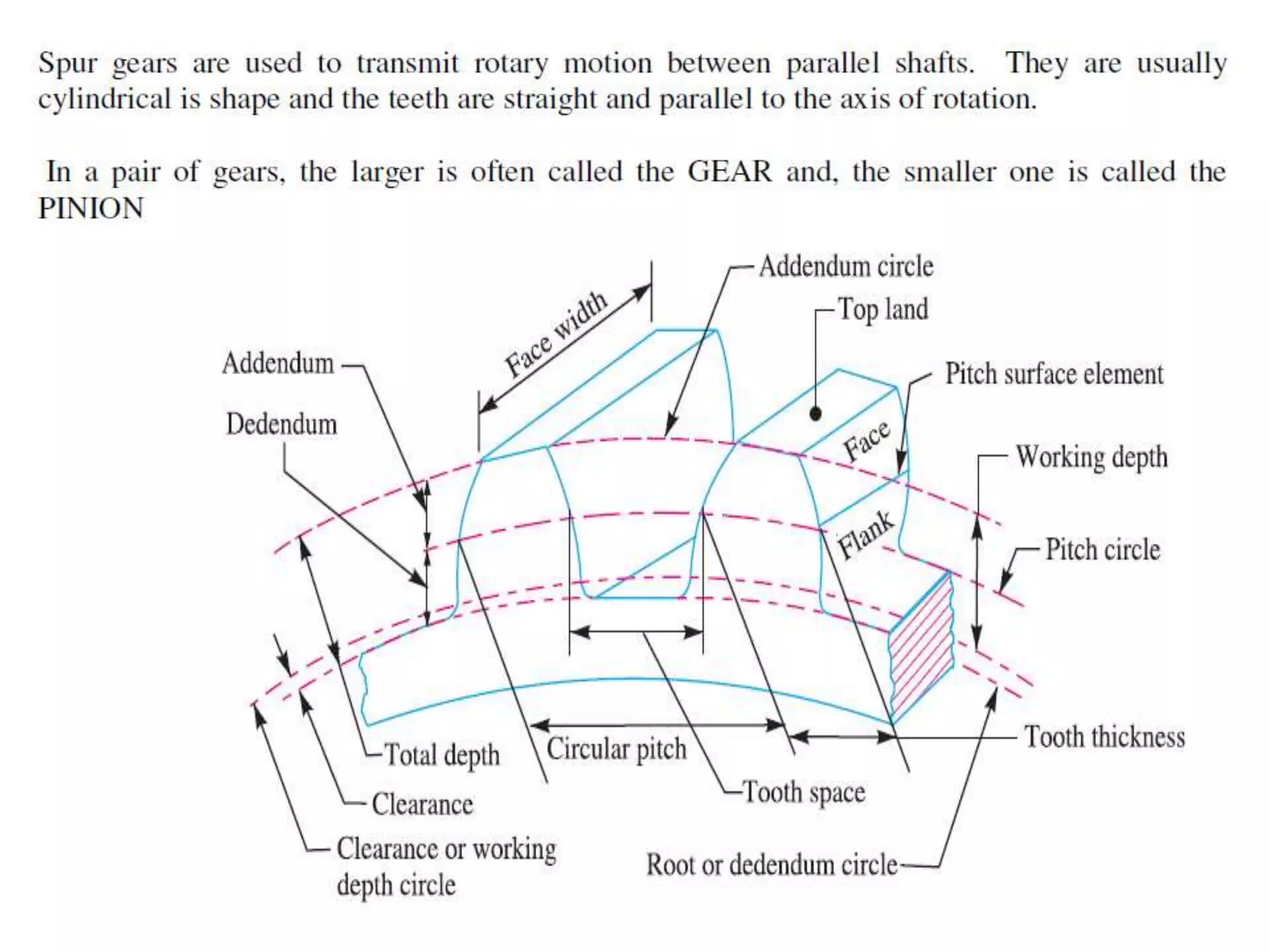
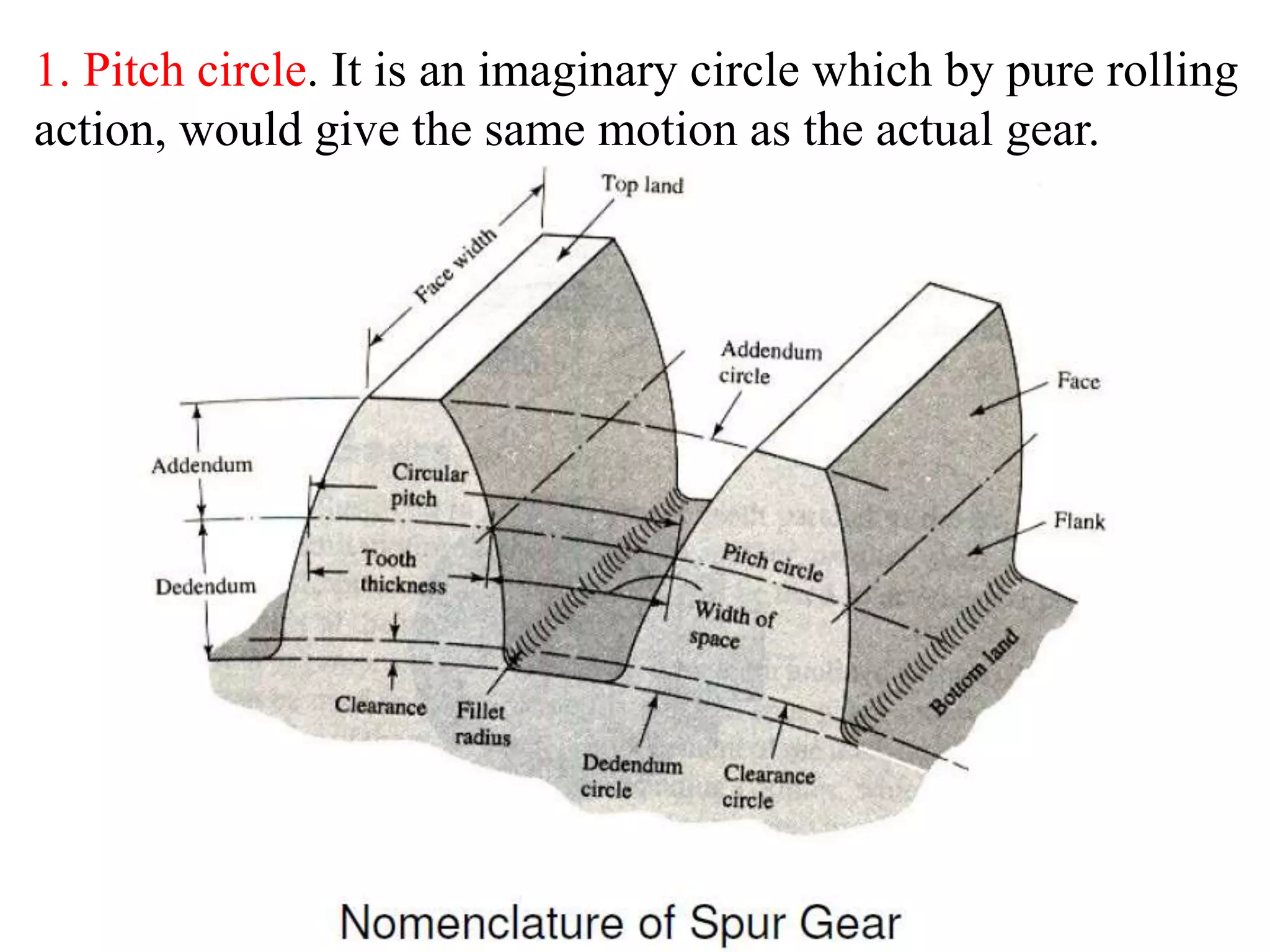
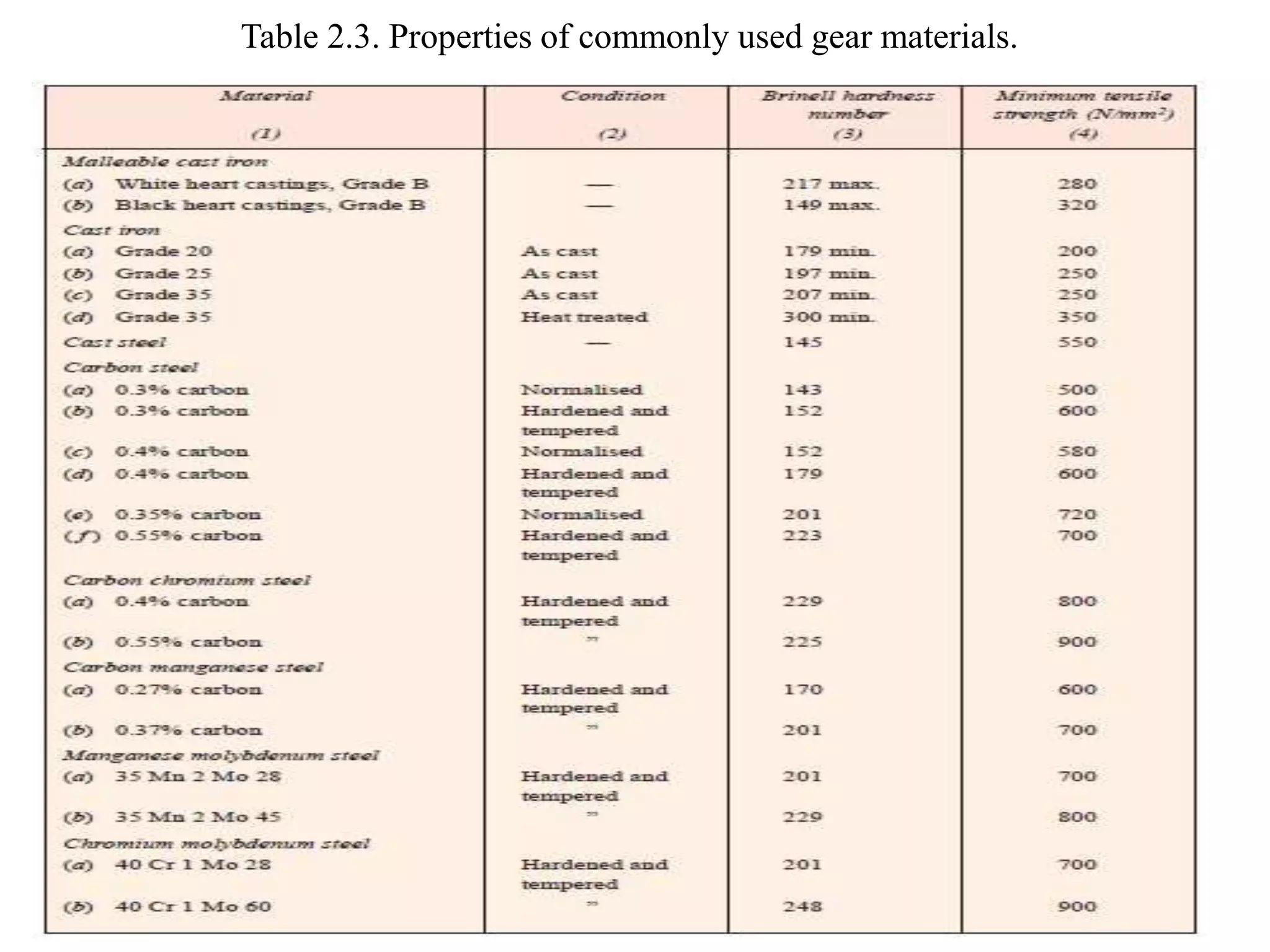
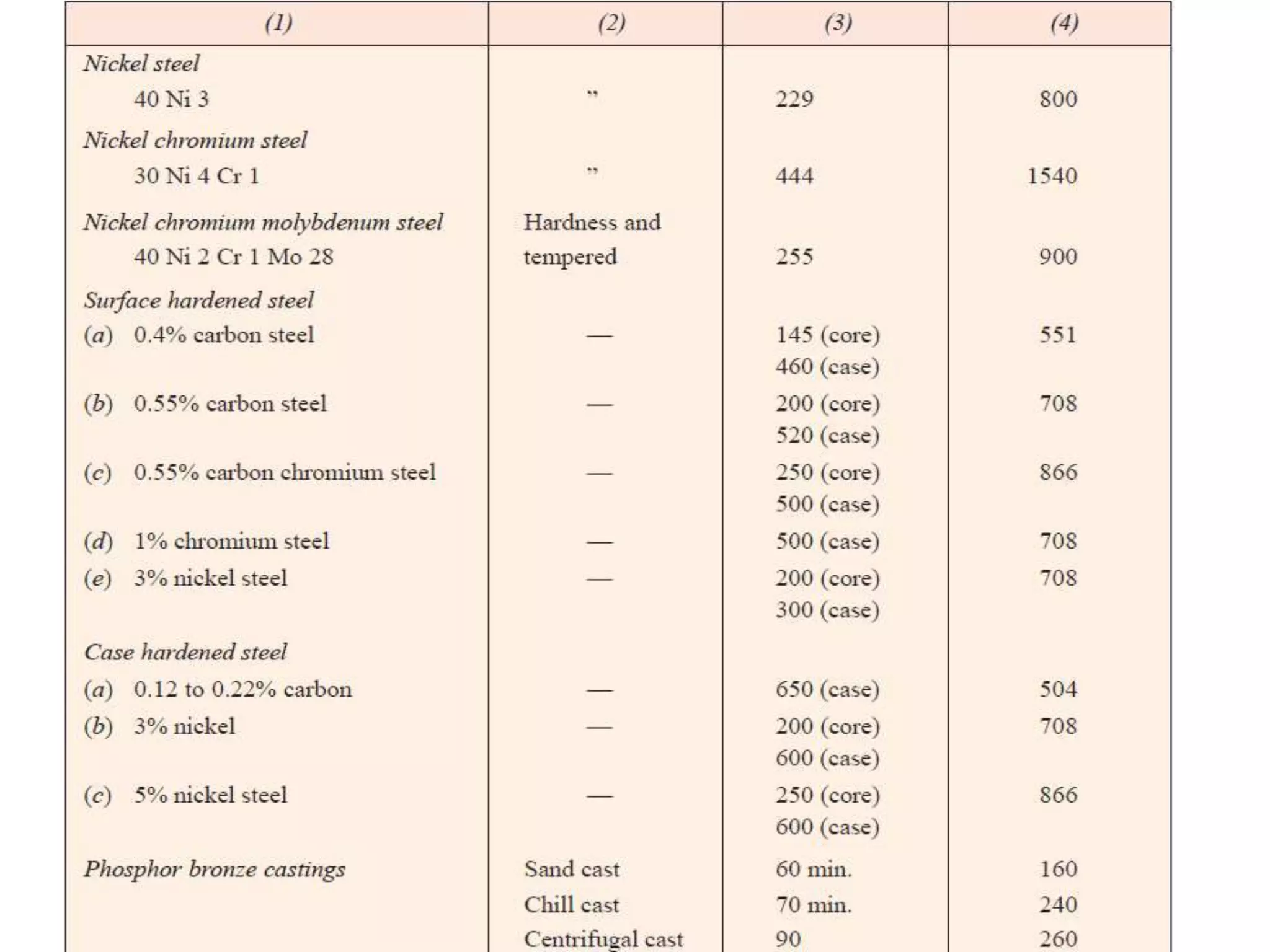
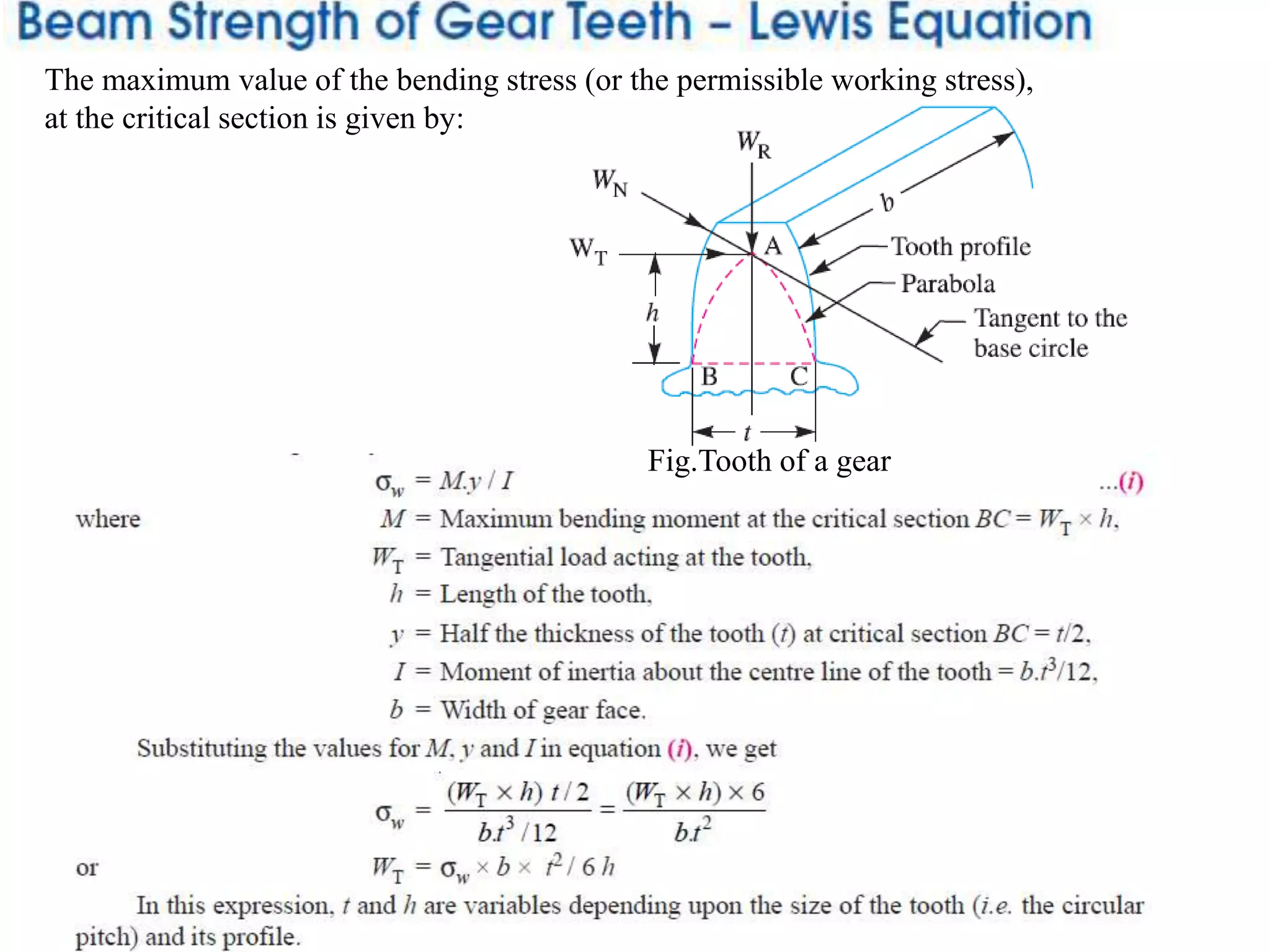
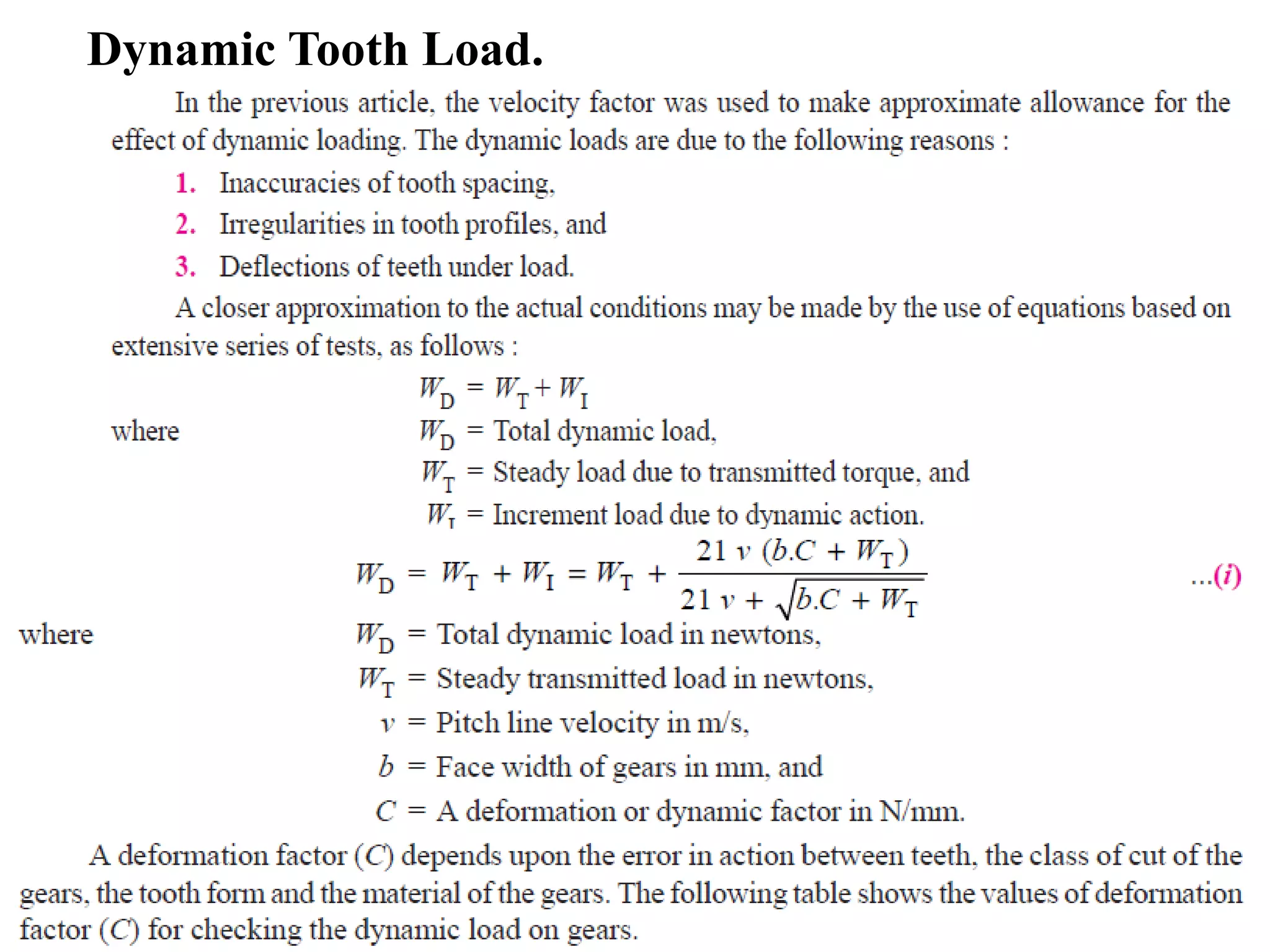
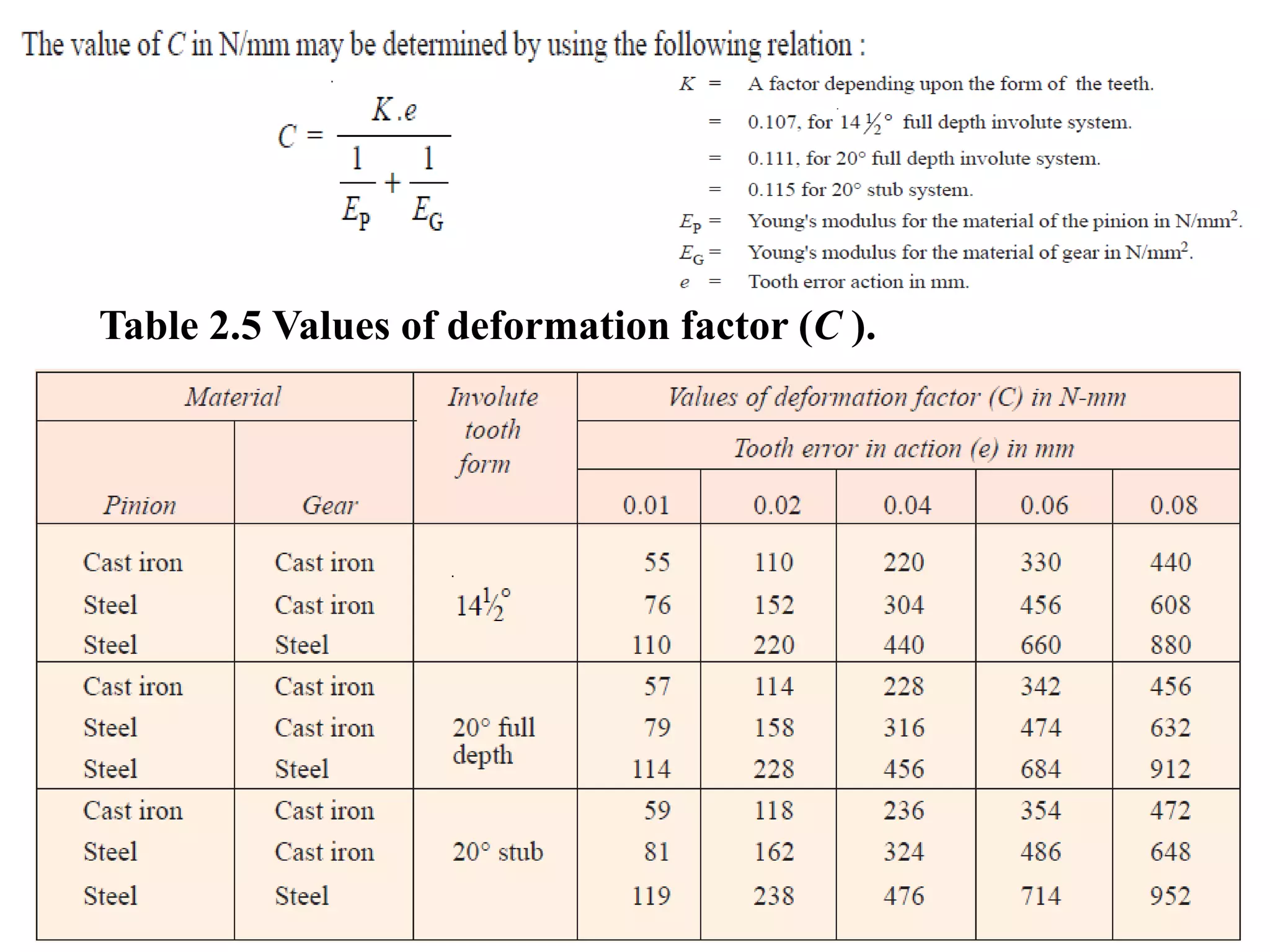
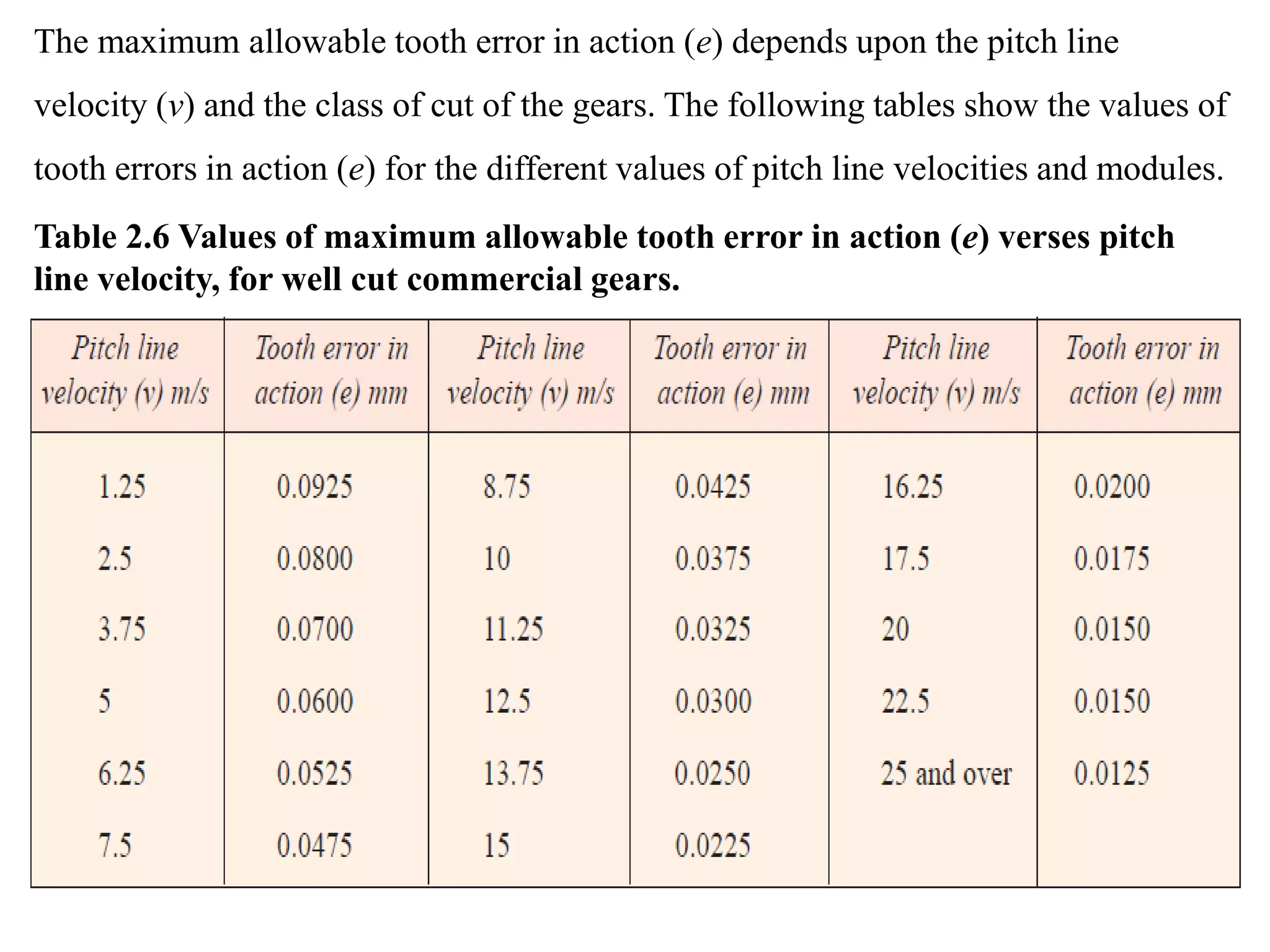
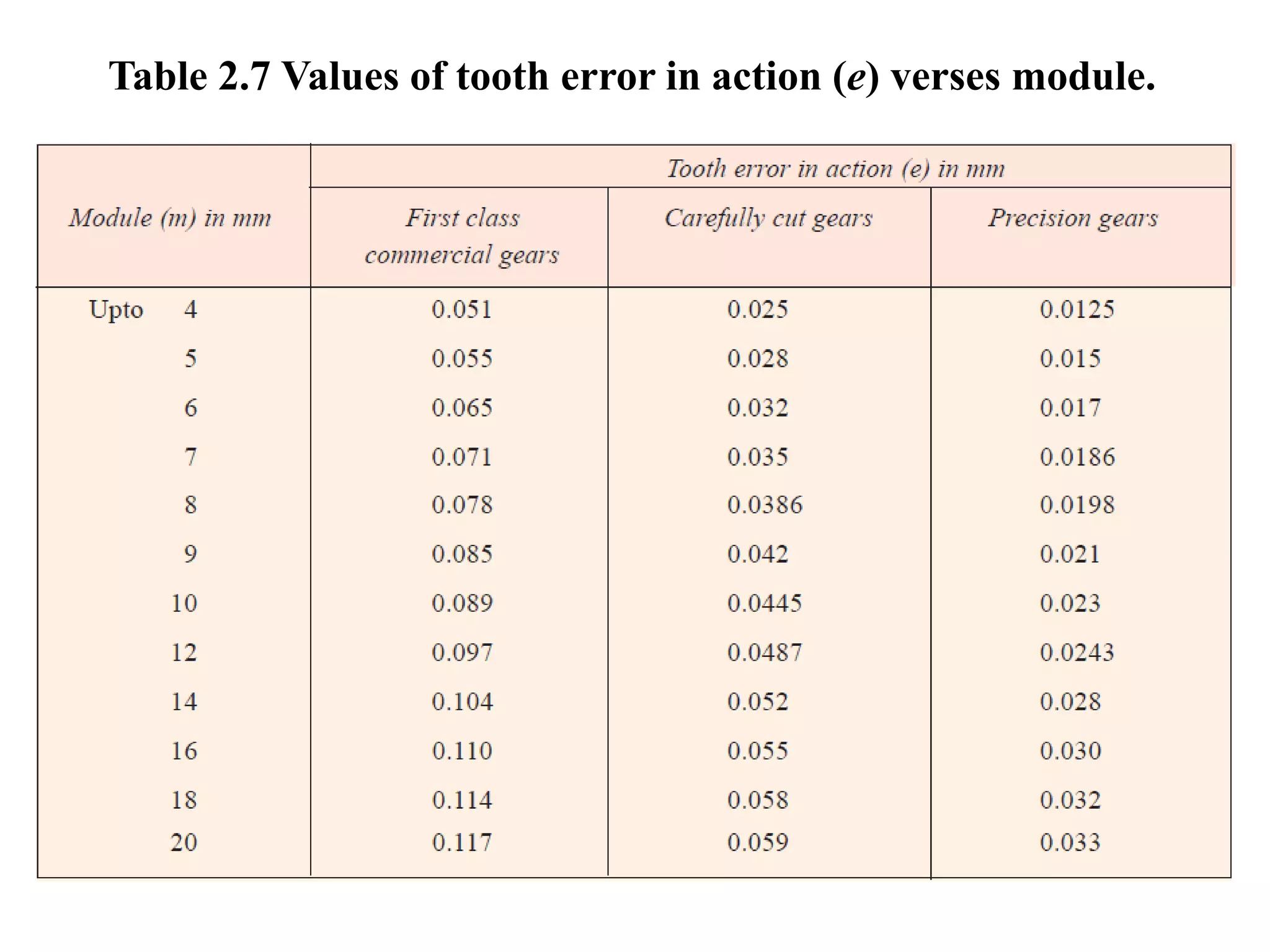
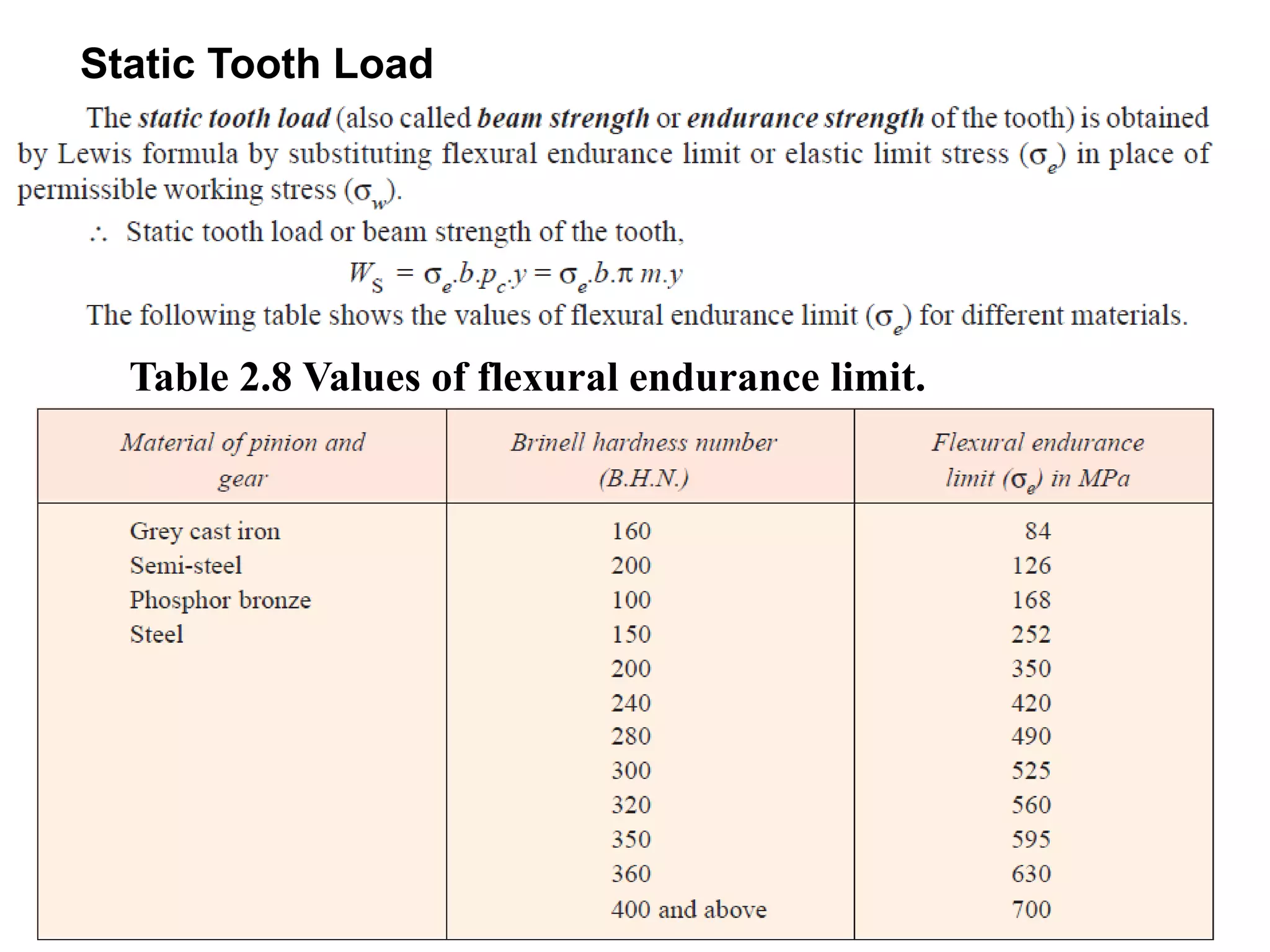
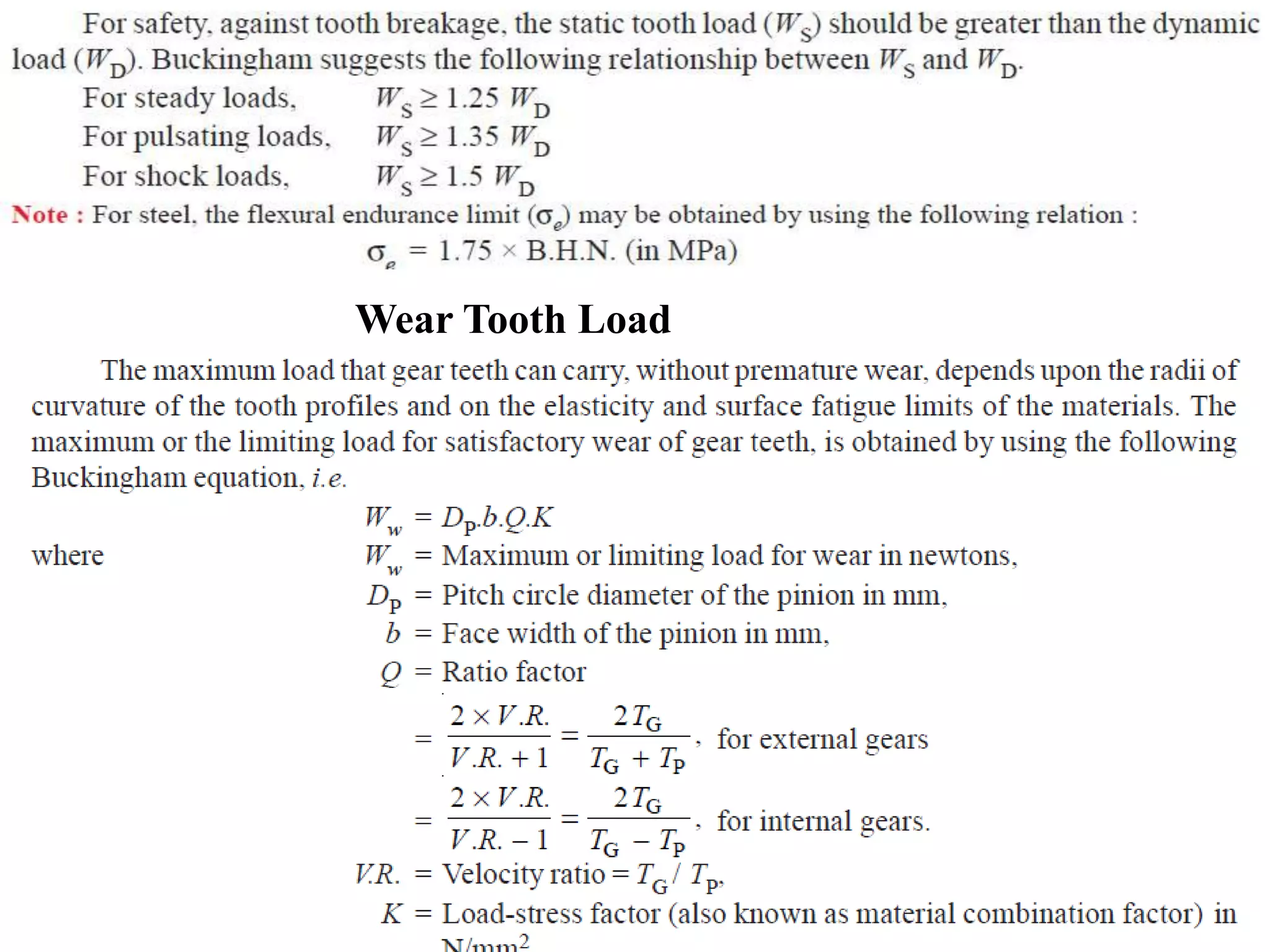
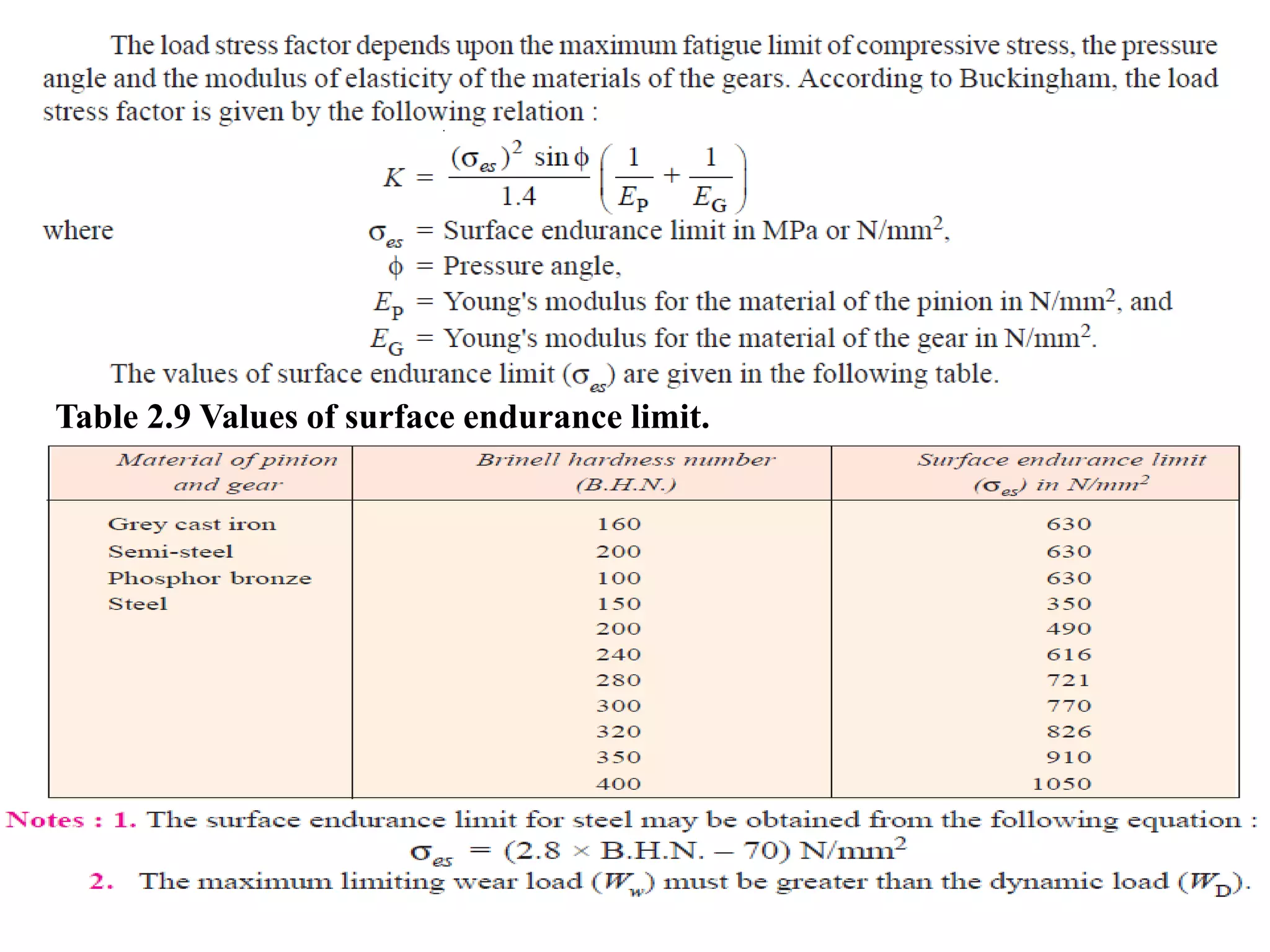
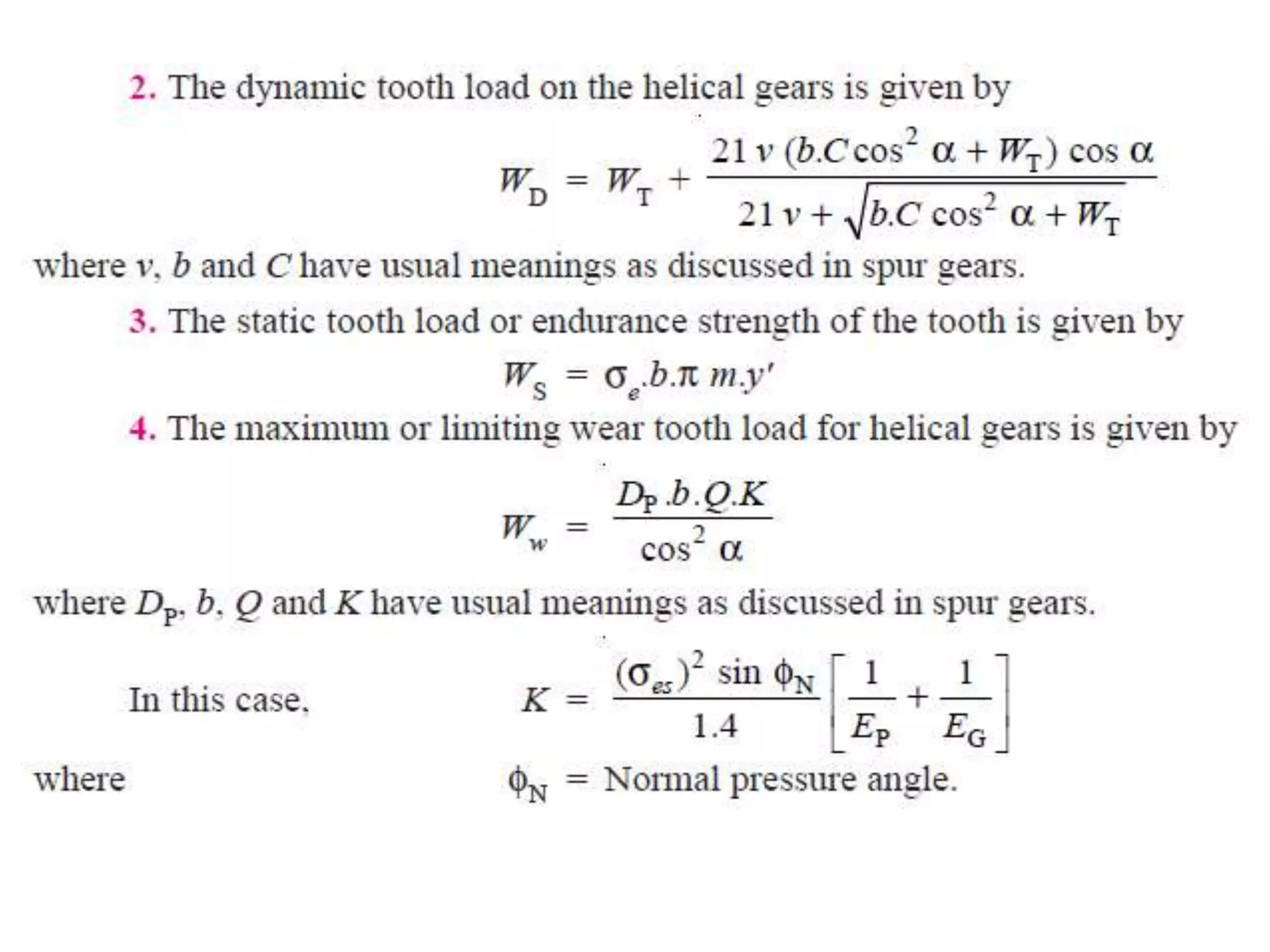
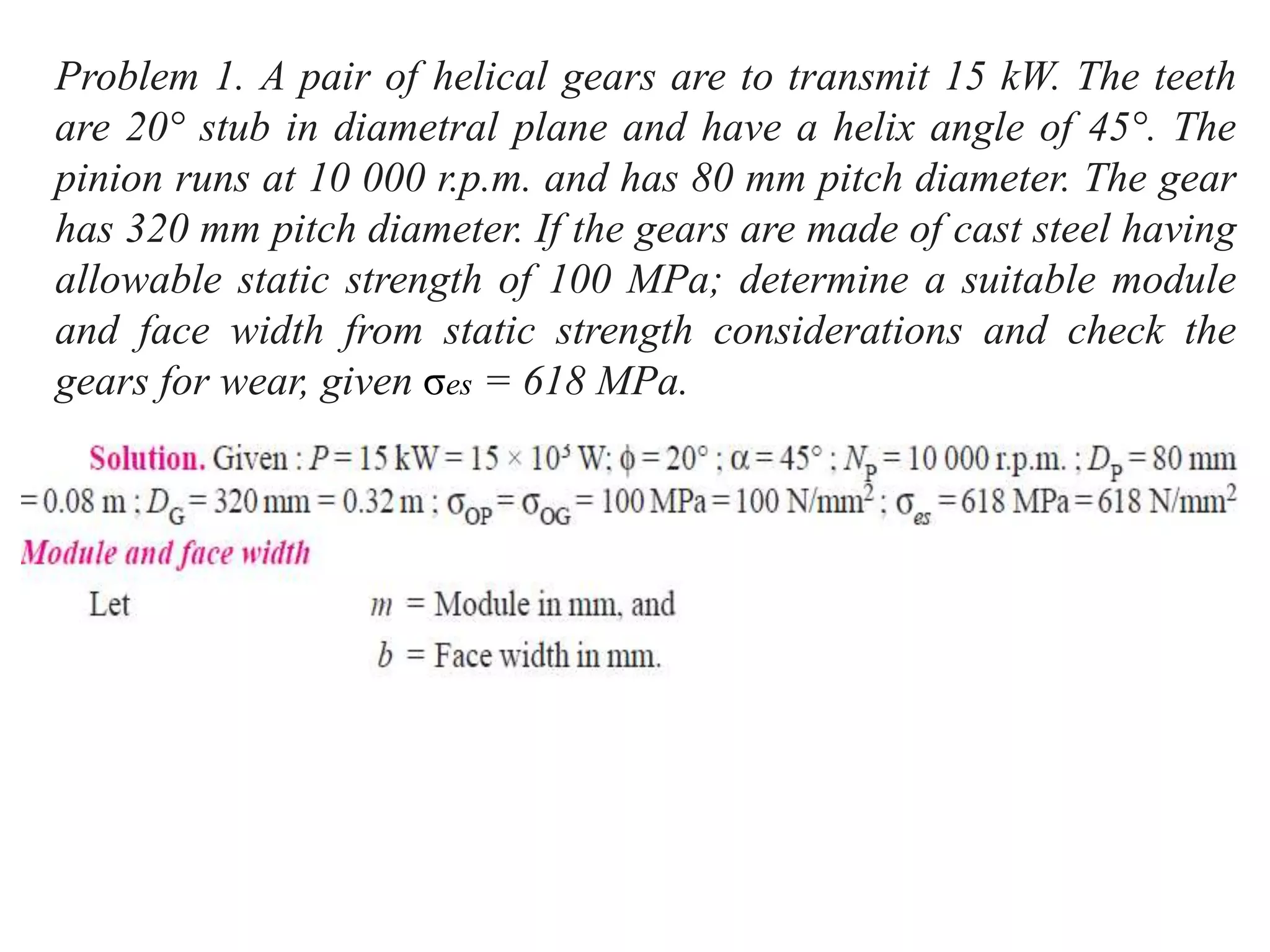
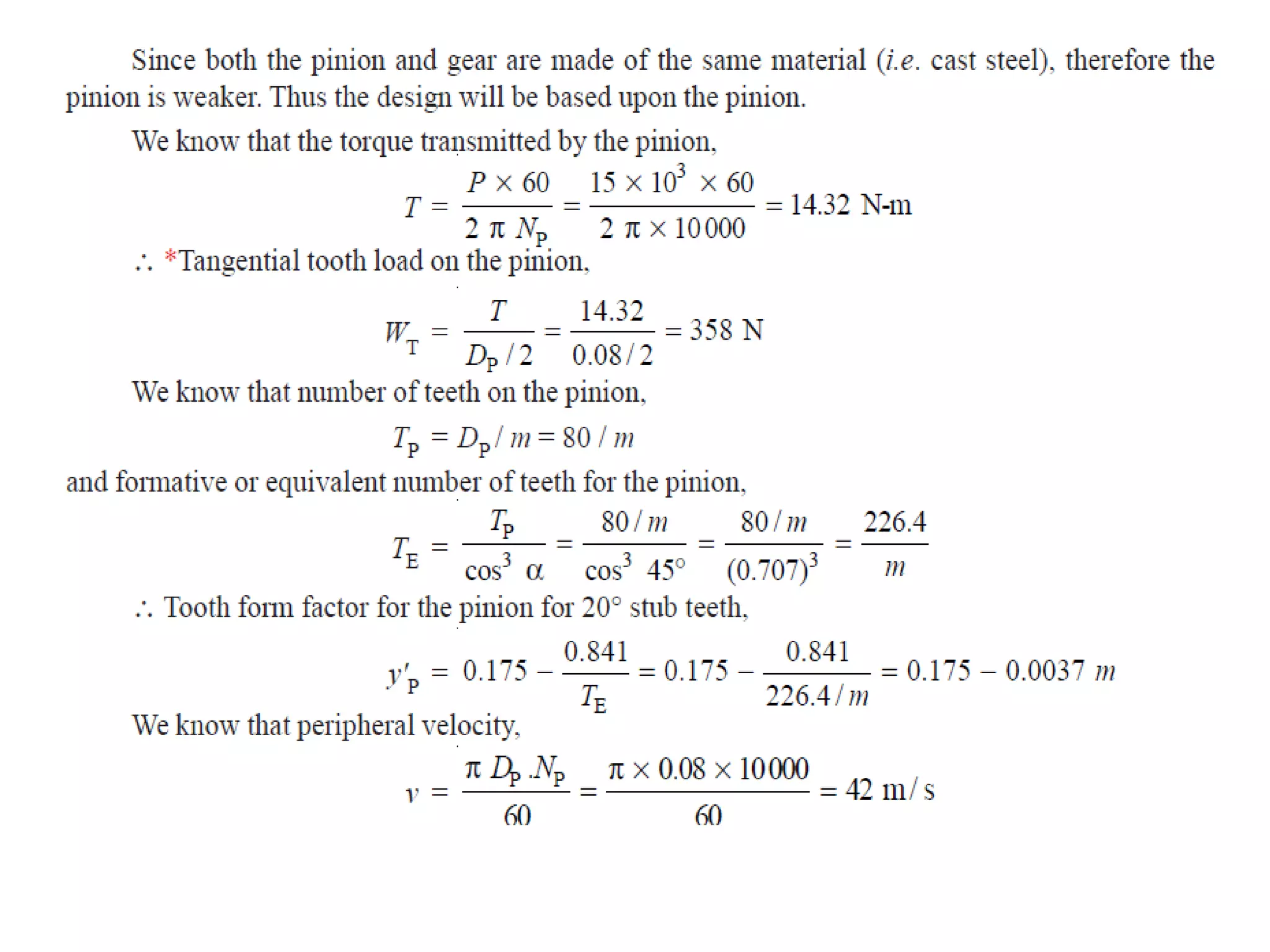
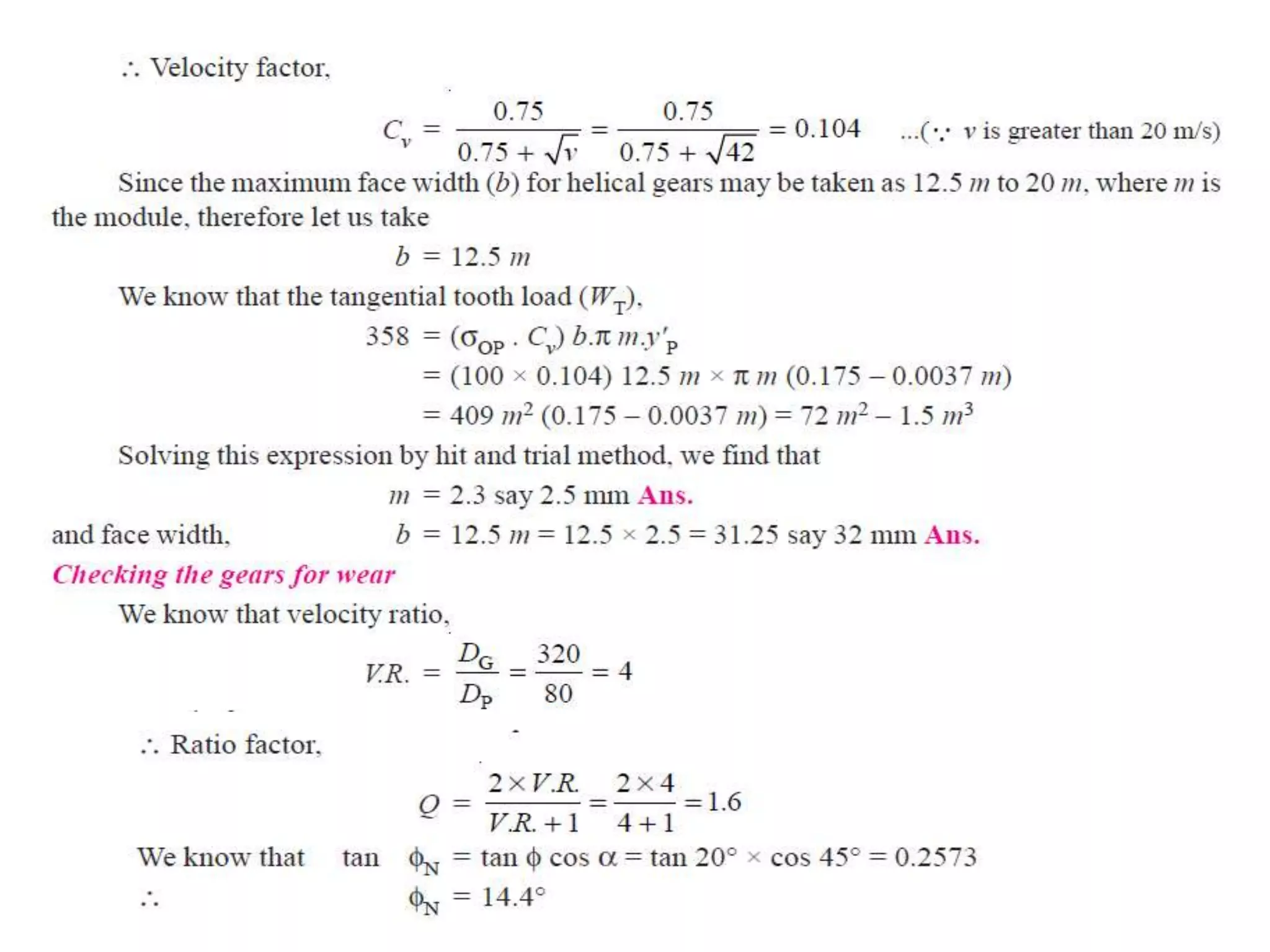
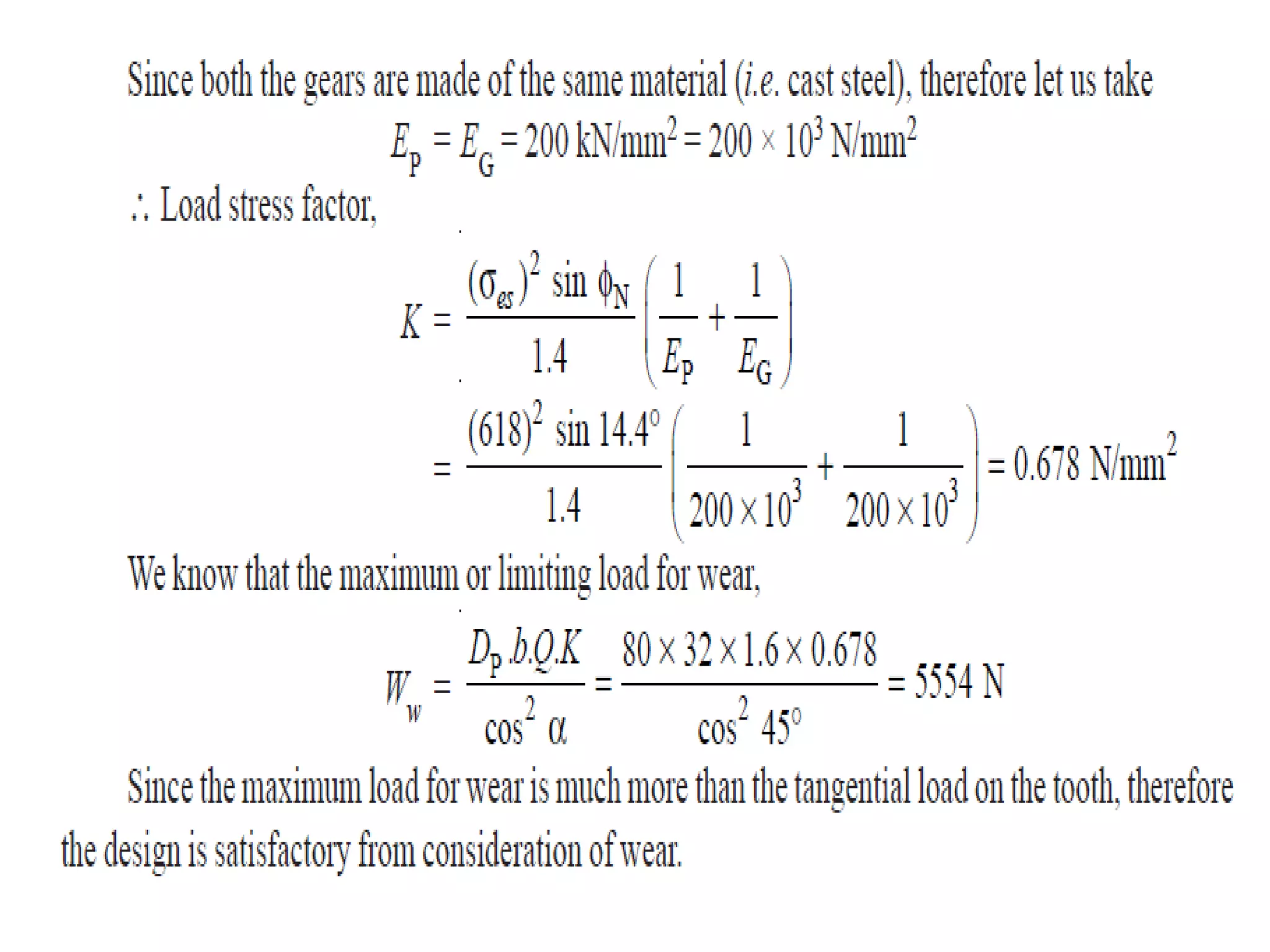
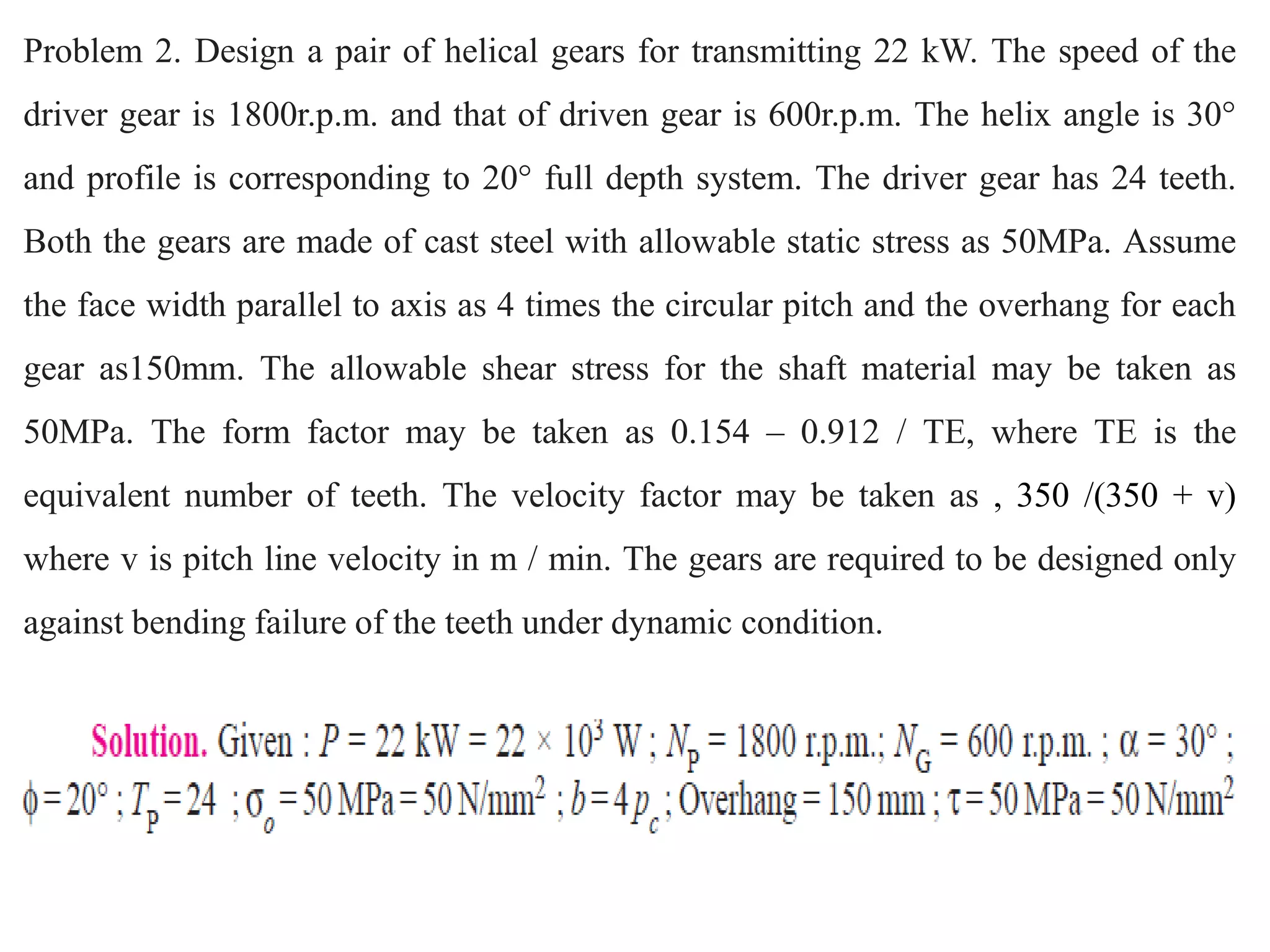
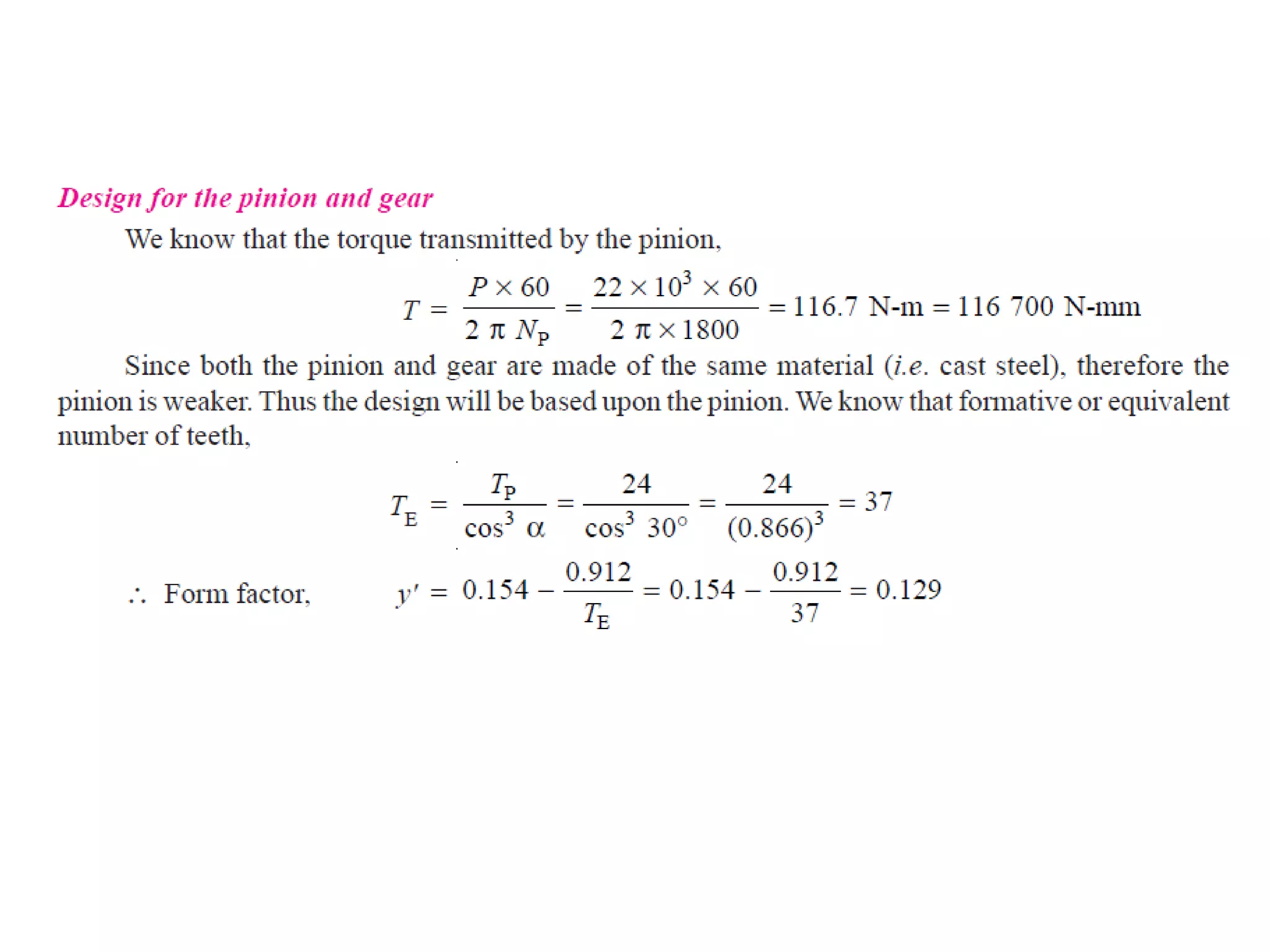
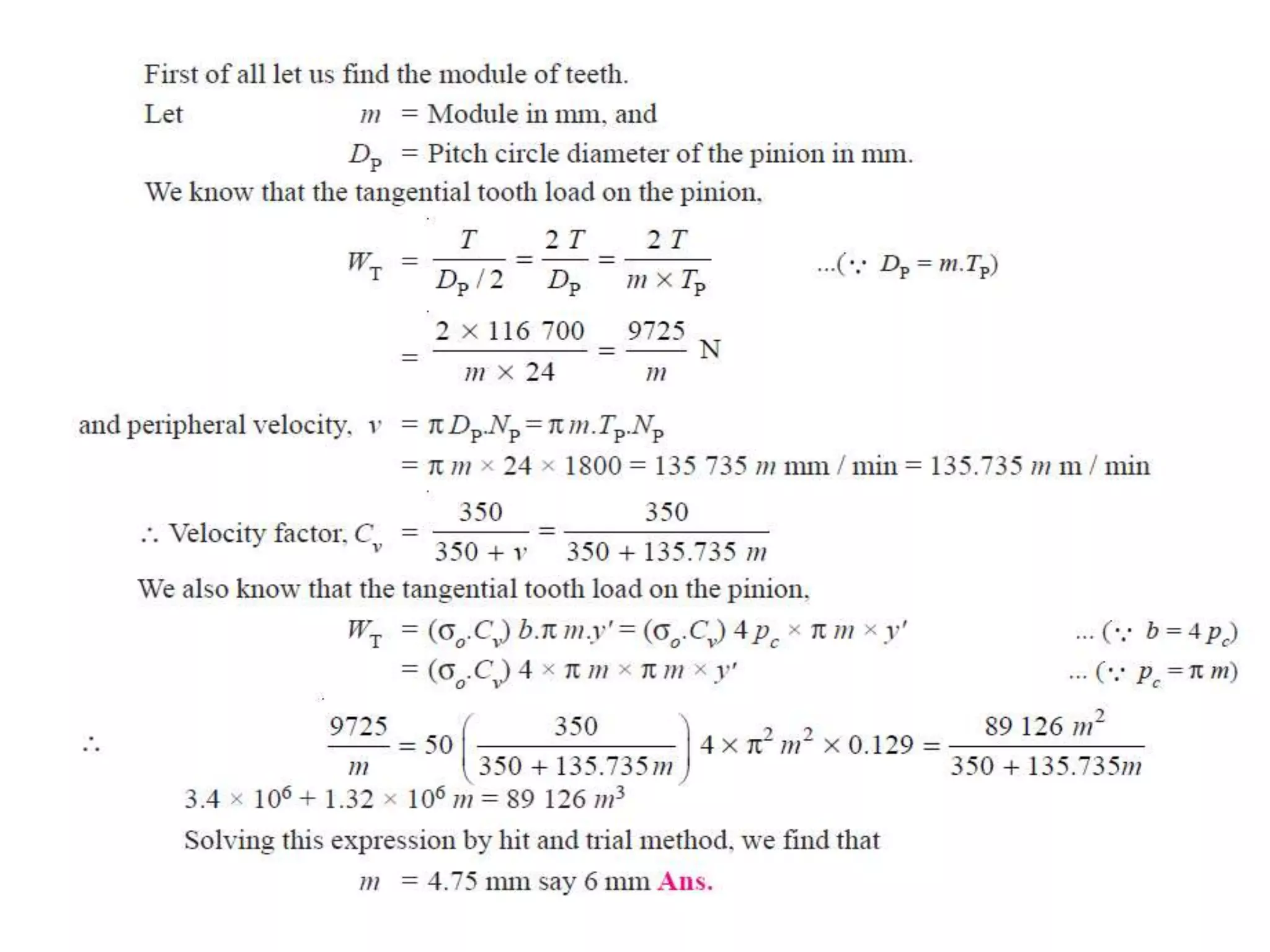
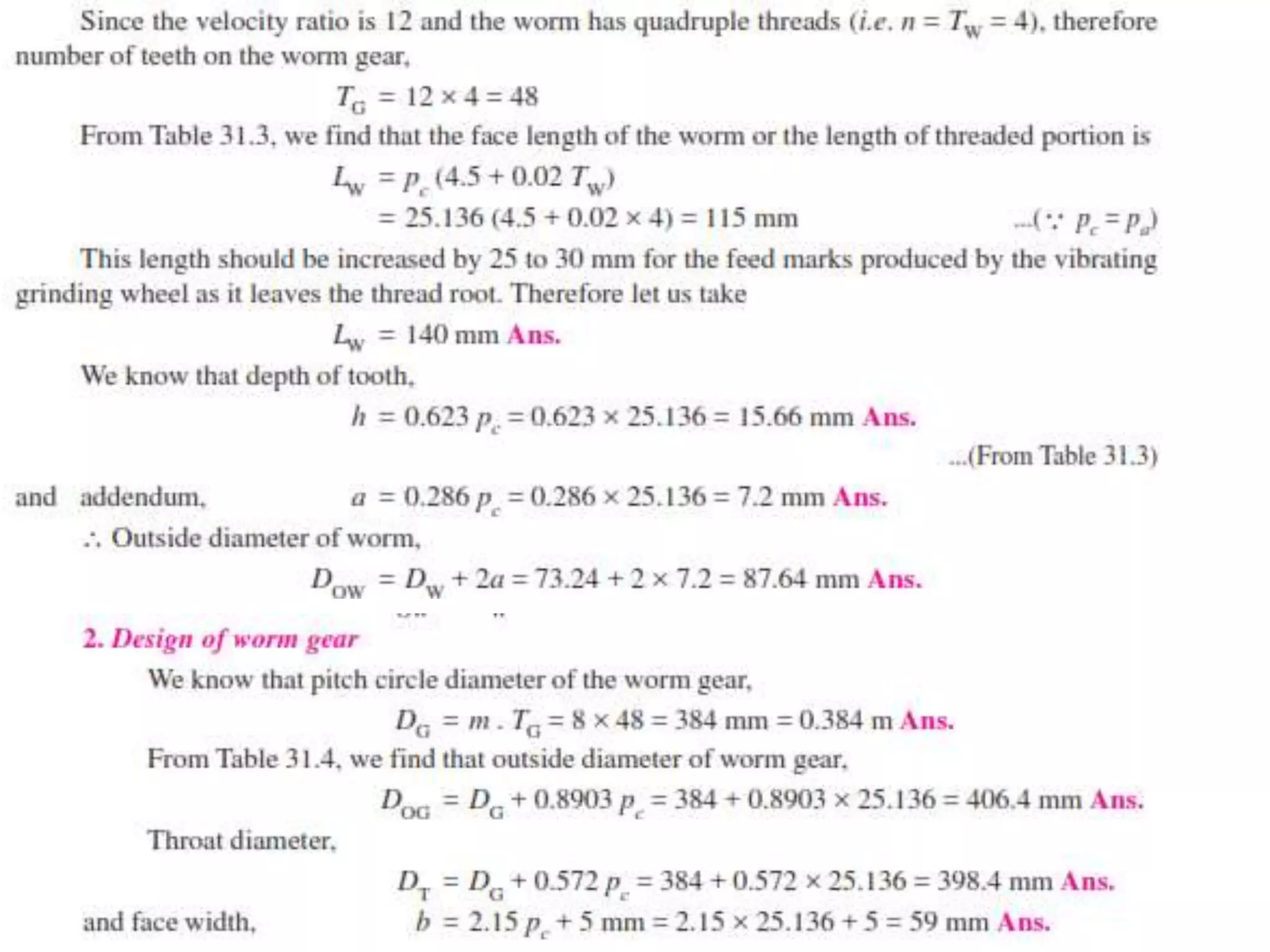
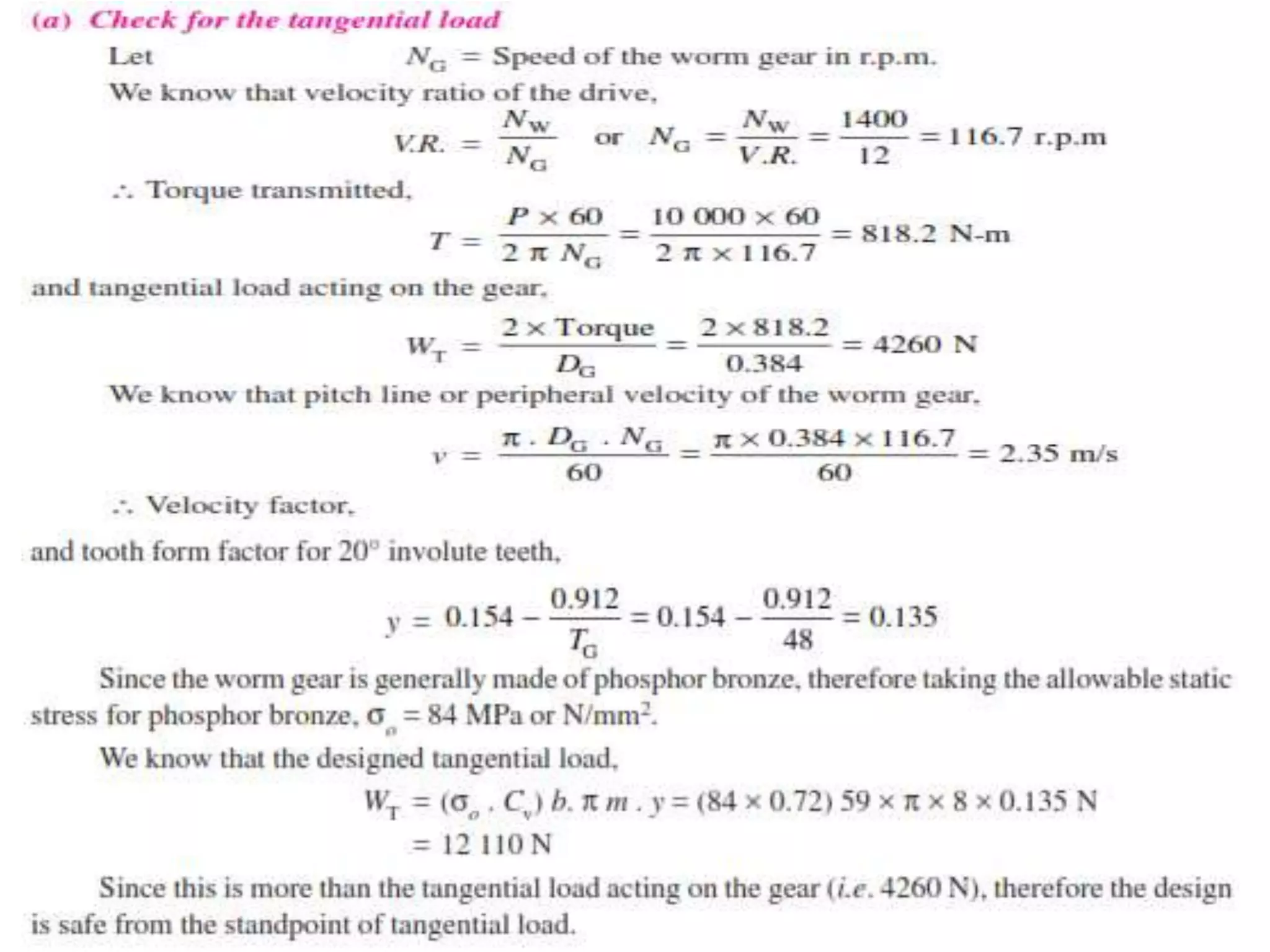
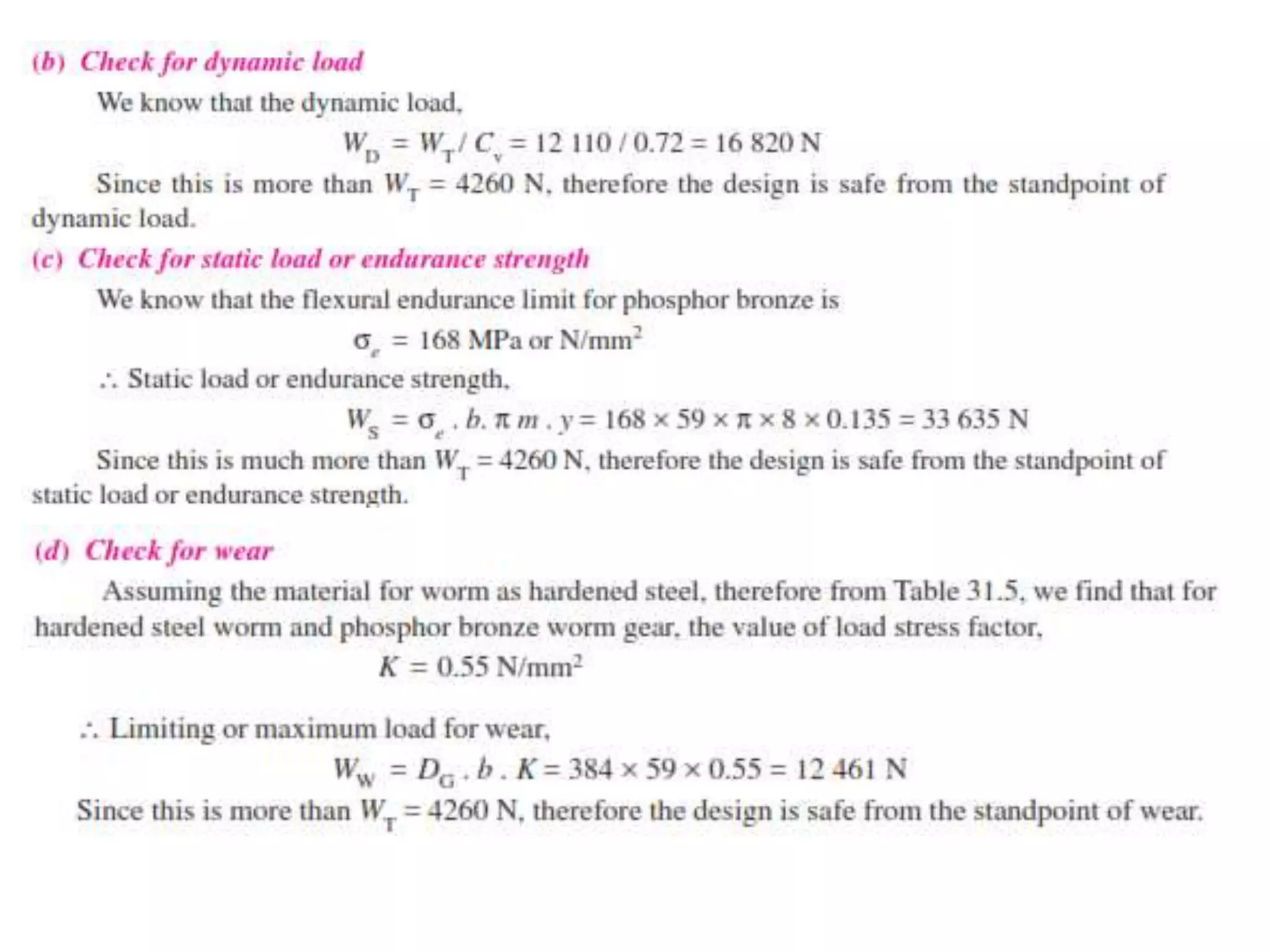
The document provides an extensive overview of gear design, including definitions, classifications, and fundamental principles of gear mechanics. Key topics include types of gears, gear tooth profiles, materials used for manufacturing, design considerations, and failure modes. It highlights the advantages of involute gears over cycloidal gears and outlines the design procedures for spur and helical gears.