Downloaded 27 times


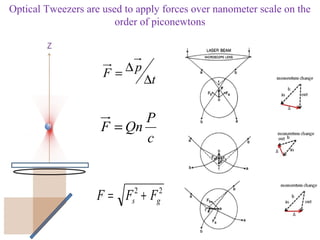
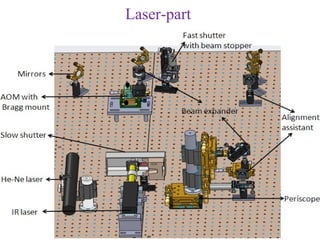
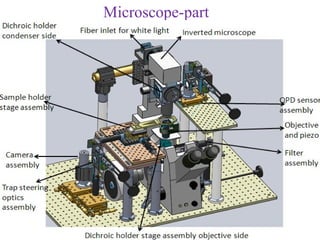
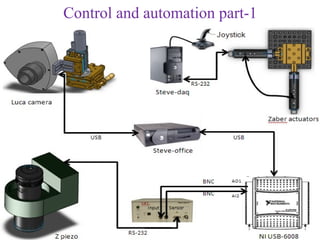
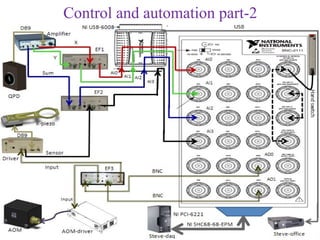
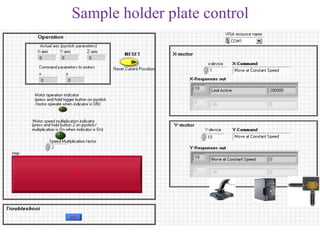
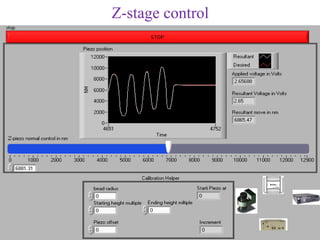

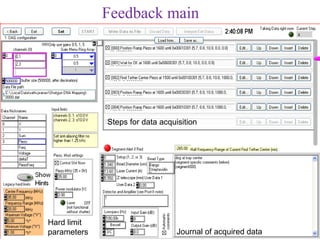
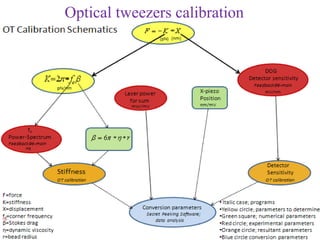
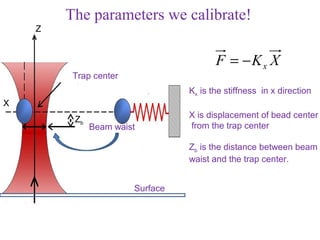
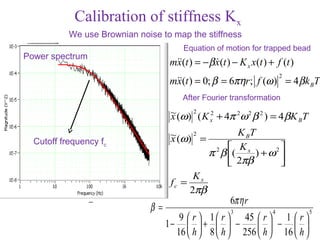
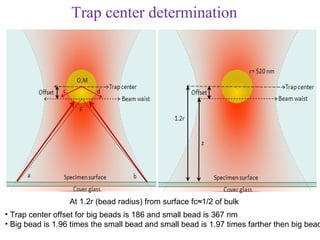
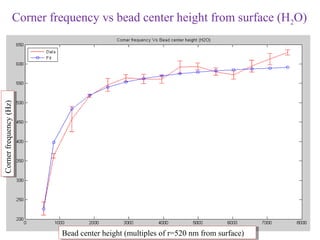
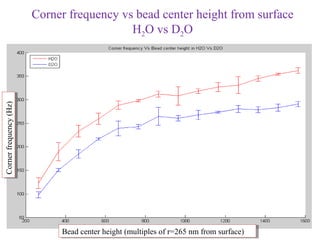

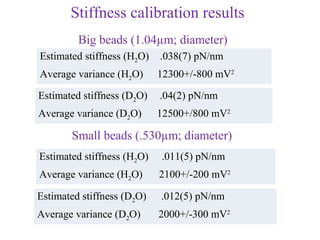
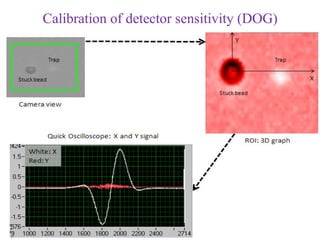
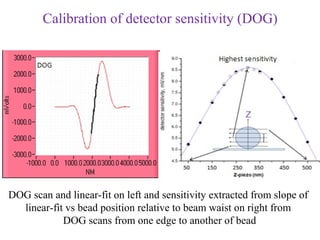
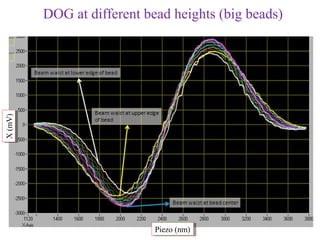
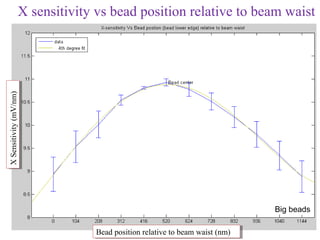
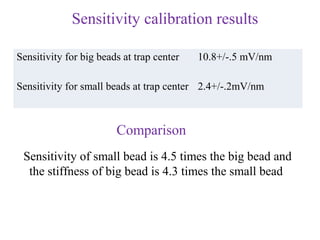
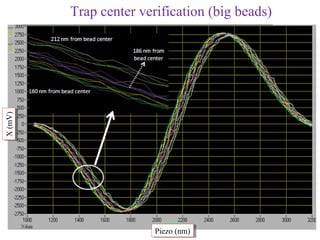
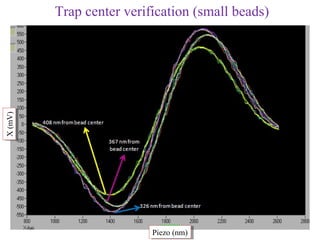
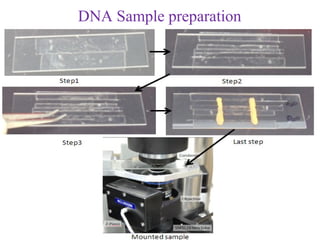
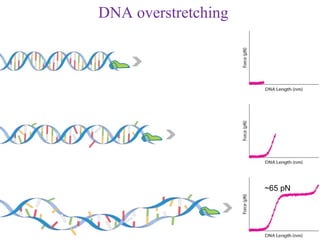
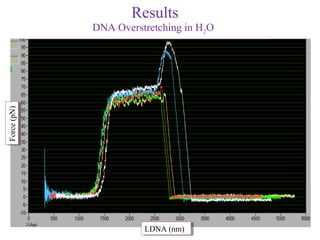
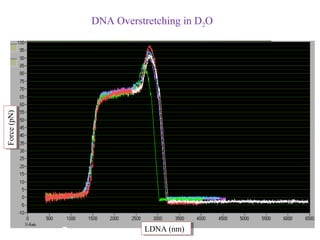
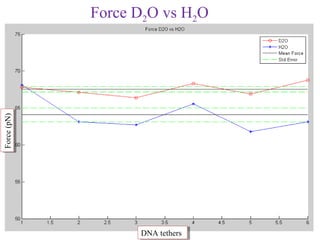
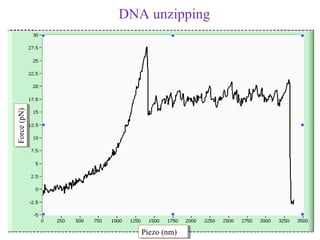

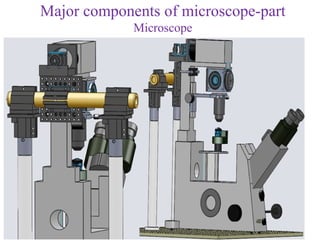

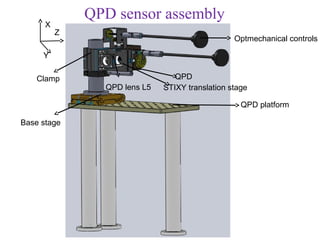
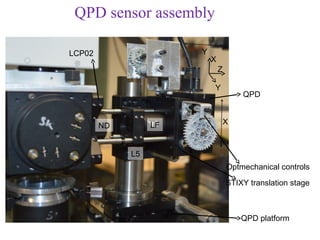
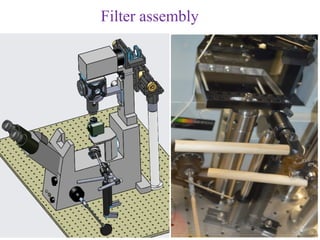
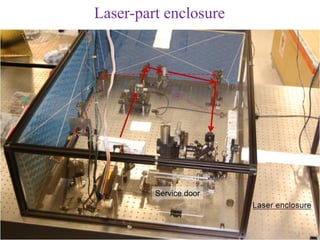

An automated optical tweezers system was designed and constructed for biomolecular investigations. Key aspects included automation and control of the tweezers, calibration of stiffness and sensitivity, and DNA sample preparation and experiments. Results showed DNA overstretching and unzipping experiments in both water and heavy water. Future work will focus on further automation and investigating DNA-protein interactions.