Downloaded 29 times



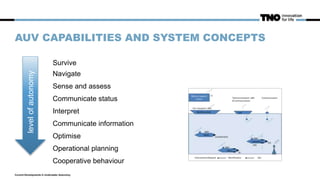
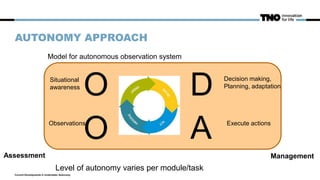

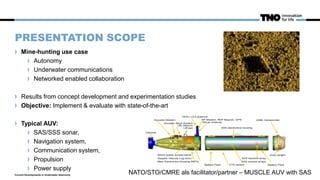
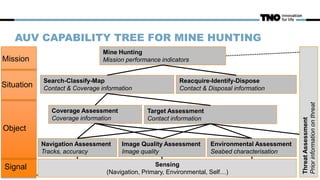
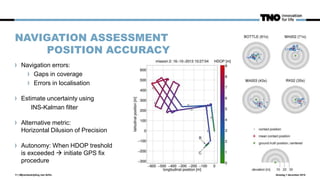
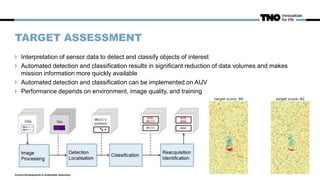
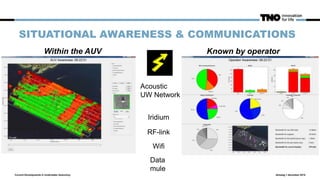
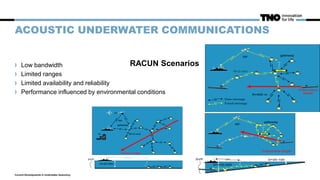
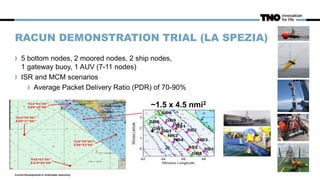
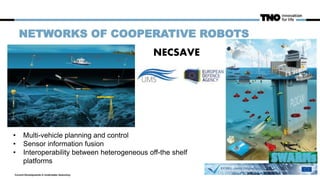


The document discusses recent advancements in underwater autonomy, focusing on unmanned underwater vehicles (AUVs) and their capabilities in navigation, communication, and mission performance for tasks like mine-hunting. It highlights challenges such as communication limitations, lack of GPS, and environmental factors affecting AUV operations. The need for autonomy in enhancing data collection, improving situational awareness, and enabling adaptive responses in dynamic underwater environments is emphasized.























































































![Getting Started with Apache Spark: Big Data Made Simple [Free Meetup]](https://cdn.slidesharecdn.com/ss_thumbnails/apachesparkgettingstarted-260203175547-8361bcc3-thumbnail.jpg?width=640&height=640&fit=bounds)














