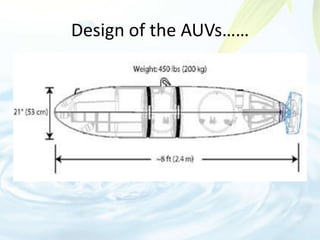
This document provides an overview of autonomous underwater vehicles (AUVs). It discusses that AUVs are unmanned vehicles that operate underwater without human input. The first AUV was developed in 1957. AUVs can be up to 8 feet long, 450 pounds, and operate up to 4,500 meters deep. They use sensors like compasses, depth sensors, sonars, and thermistors to navigate autonomously. AUVs are powered by rechargeable batteries and use propellers or jets for propulsion. They have commercial uses like seabed mapping for oil/gas and military uses like mine detection. Scientists also use AUVs for environmental research with sensors to study oceans and lakes.