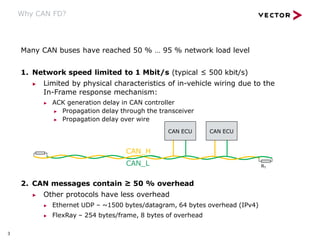
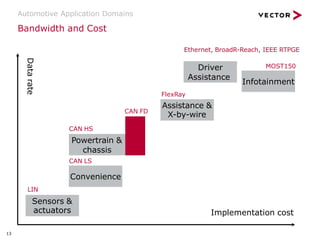
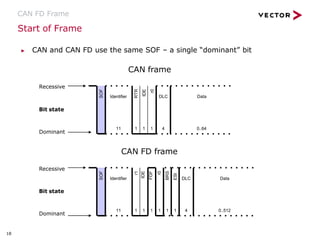
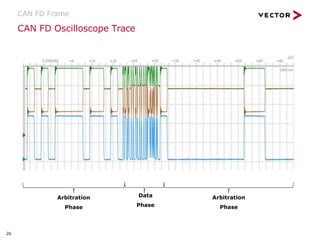
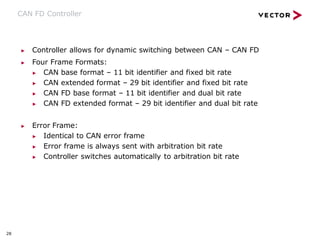
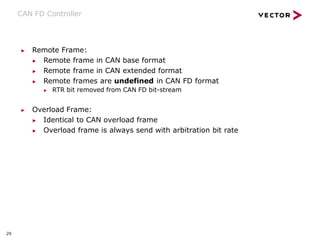
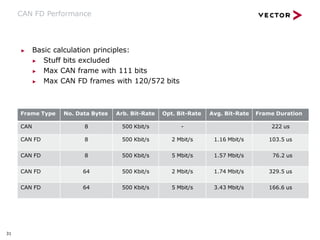
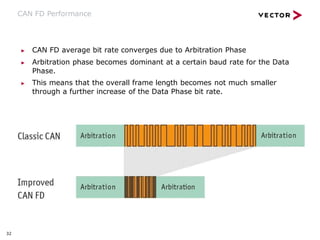
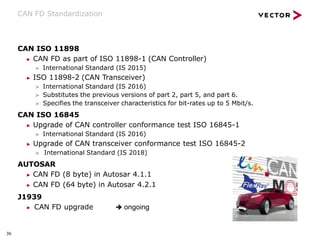
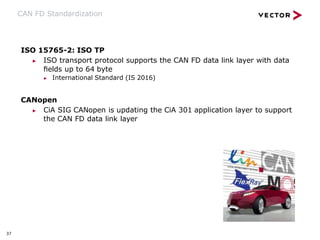
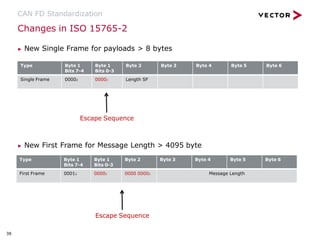
CAN FD is an improved version of the CAN protocol, designed to enhance communication speed and payload capacity by allowing dual bit rates and larger data frames of up to 64 bytes. It addresses limitations of traditional CAN systems, such as high bus load, by offering faster data transfer rates and better efficiency in messages. The protocol is being standardized under ISO guidelines and is being adopted in various automotive applications to support increased bandwidth needs.