Download to read offline
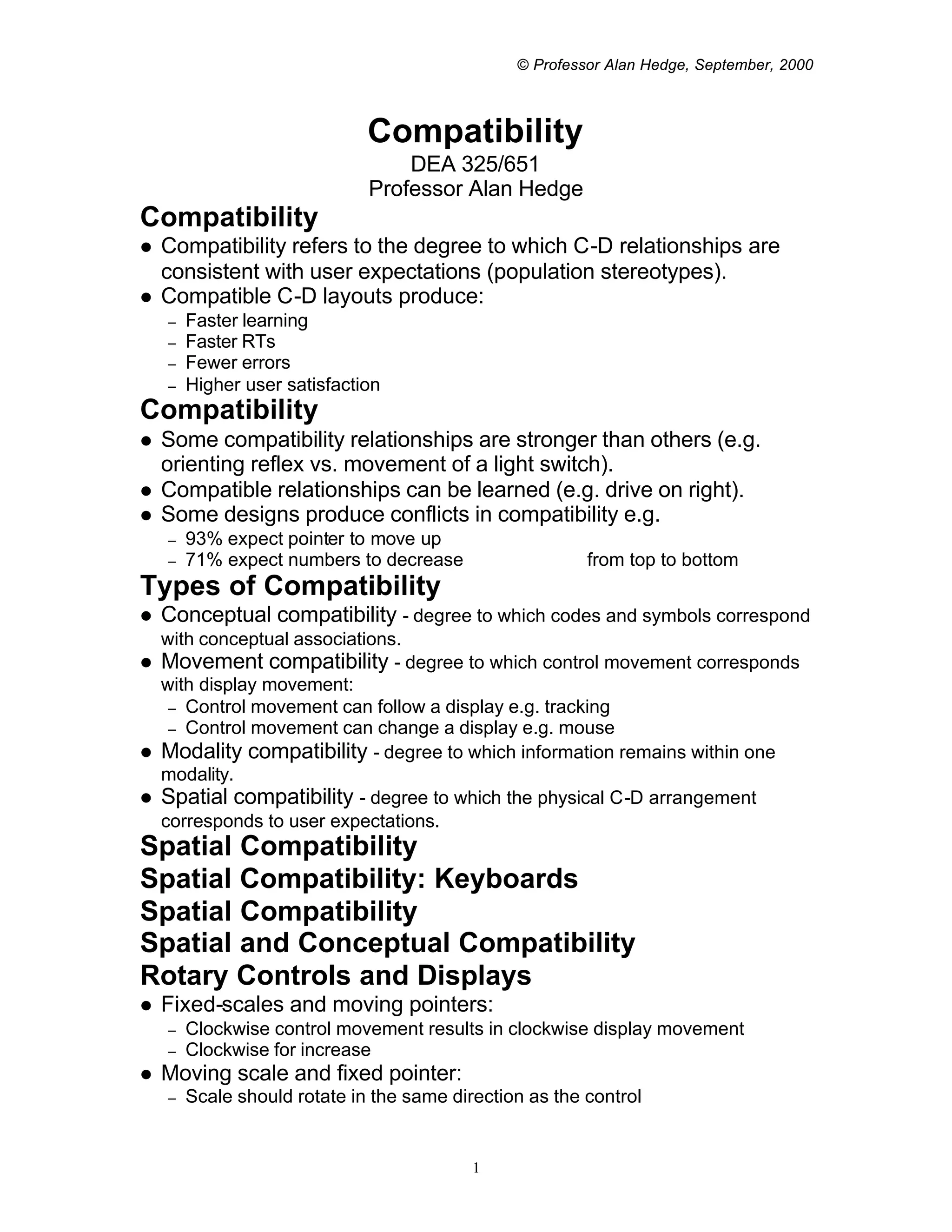

This document discusses compatibility in human-machine interfaces. It defines compatibility as how well a control-display relationship matches user expectations. Compatible designs lead to faster learning, response times, fewer errors, and higher satisfaction. There are different types of compatibility, including conceptual (symbols matching expectations), movement (control and display moving together), spatial (physical arrangement matching expectations), and modality (keeping information within one sense). Spatial compatibility is particularly important for rotary controls, keyboards, and stick controls. Recommended design principles include the control and display moving in the same direction and numbers on linear displays increasing from left to right.












![PM [B05] Angles & Measurement](https://cdn.slidesharecdn.com/ss_thumbnails/pmb05anglesmeasure-151011170600-lva1-app6891-thumbnail.jpg?width=640&height=640&fit=bounds)
























![[UX Series] 3 - User behavior patterns and design principles](https://cdn.slidesharecdn.com/ss_thumbnails/vmm42awvqzihoupsjjkf-signature-085edba094deb1097db5eeb63e43eae4848440a0bb65a4aa426f2323e93c2199-poli-150828120514-lva1-app6892-thumbnail.jpg?width=640&height=640&fit=bounds)