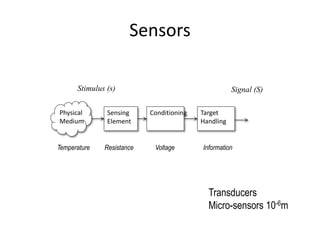
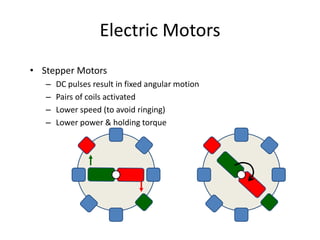
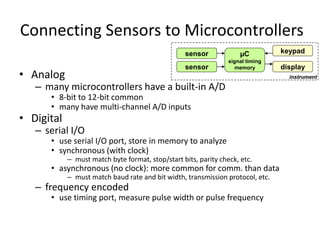
The document provides a comprehensive overview of sensors, actuators, and microcontrollers, detailing their definitions, classifications, and functions in various applications. It outlines the processes by which sensors convert stimuli into signals, how actuators respond to commands, and how microcontrollers integrate these components for data processing and control. Additionally, the text discusses calibration, communication protocols, and various microcontroller architectures to highlight the versatility and design considerations in embedded systems.